Устройство кисти руки человека: Возможности кисти человека и ее гениальное строение свидетельствуют об удивительном искусстве ее Создателя
Возможности кисти человека и ее гениальное строение свидетельствуют об удивительном искусстве ее Создателя
Каждая частица культуры — от удивительных наскальных рисунков в пещере Ласко до написания слов этой статьи, каждый дом, офис и храм, когда-либо построенные, любой музыкальный инструмент, когда-либо радовавший наш слух — все это создано человеческой рукой. Кисть руки человека представляет собой чудо дизайна. Без ее уникальных свойств мы достигли бы в жизни совсем немного. Удивляясь красивым городам или последним достижениям в сфере технологий, мы в то же время почему-то проходим мимо самих себя, не изумляясь совершенству своего строения.
Уникальные возможности
Уникальность кисти человека в том, что она не просто орган манипулирования, но и орган знания и общения. Рука действует, знает и говорит. Посредством чувства осязания рука постигает и исследует внешний мир. И эта познавательная рука поразительно чувствительна — всего одно касание кончиком пальца может определить различия между бумагой, волокном, древесиной, пластиком и металлом.
Возможности кисти руки и ее гениальное строение свидетельствуют об удивительном искусстве ее Создателя.
Тонкий дизайн кисти руки
Строение руки — это ансамбль из множества костей, связок, мышц, сухожилий и нервов, согласованно работающих для выполнения разнообразных и сложных движений. Кисть руки состоит из 27 (!) костей, сочлененных посредством разных суставов. Мы можем вращать кистью в разные стороны благодаря правильному устройству запястья — места, где кисть руки присоединяется к предплечью. Запястье состоит из 8 коротких губчастых косточек, расположенных в 2 ряда. Только подумайте об этом — каждая косточка имеет свою особенную форму!
Для контроля их движения Создатель позаботился, чтобы все они были соединены между собой маленькими суставами и связками, окруженными специальными капсулами. Удивительно, не так ли? Но как жилы и нервы «проходят» через запястье от предплечья к кисти? Оказывается, для этой цели в запястье есть специальный канал.
Пять пястных костей составляют ладонь.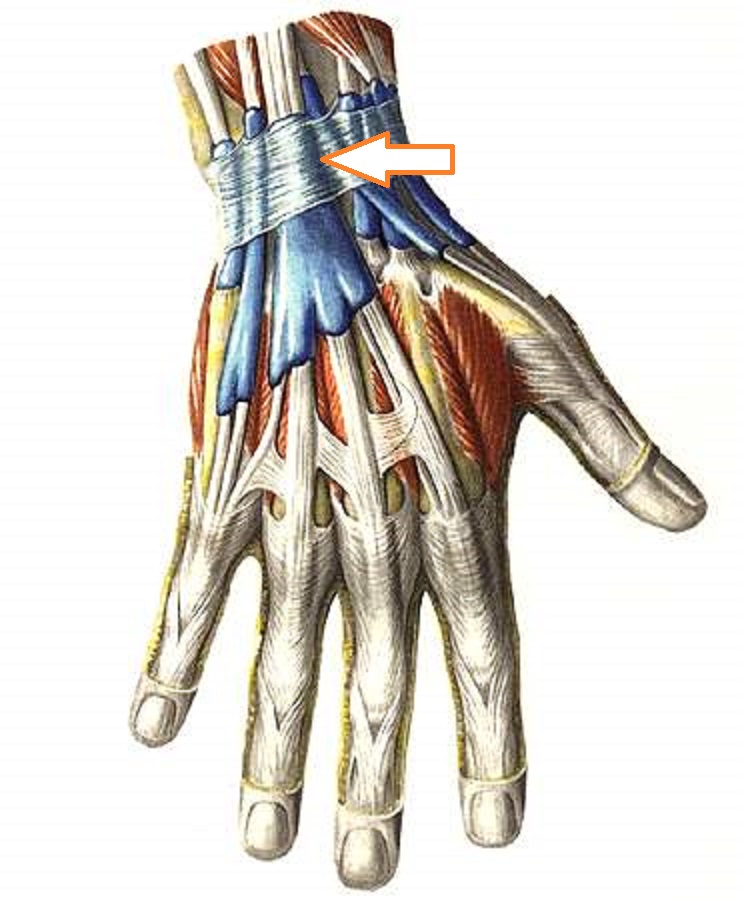 Каждая из них присоединяется к одному пальцу посредством специального сустава. Эти суставы работают как шарниры, что позволяет пальцам двигаться вверх-вниз. Мы двигаем ими миллионы раз в течение жизни, а суставы кисти настолько совершенно устроены, что не изнашиваются! Они покрыты специальным хрящом, который, как резина, смягчает удар и облегчает движение.
Каждая из них присоединяется к одному пальцу посредством специального сустава. Эти суставы работают как шарниры, что позволяет пальцам двигаться вверх-вниз. Мы двигаем ими миллионы раз в течение жизни, а суставы кисти настолько совершенно устроены, что не изнашиваются! Они покрыты специальным хрящом, который, как резина, смягчает удар и облегчает движение.
На этом чудеса дизайна не заканчиваются — три поперечные арки придают руке стабильность и мобильность, а специальные крошечные косточки встроены в жилы внутри кисти руки, чтобы обеспечивать дополнительный рычаг при усилиях и уменьшать давление на ткани.
В кисти руки обнаруживается уникальное соотношение величин. Основная фаланга во всех пальцах, кроме большого, равна сумме длин средней и последней фаланги — соотношение, известное как число Фибоначчи. Размеры всех фаланг каждого пальца соотносятся друг к другу по правилу золотой пропорции, т.е. каждая фаланга больше предыдущей в 1,618.
Незаменимые пальцы
Все наши пальцы имеют оптимальную длину и расположение, и каждый из них играет свою неповторимую роль. Большой палец способен полностью противопоставляться остальным пальцам, благодаря чему мы можем совершать схватывания разной силы и точности. Его фаланга соединена с ближайшей костью запястья (а не с костью ладони), в противном случае он не смог бы достаточно отклоняться от указательного пальца и мы не смогли бы работать с инструментами. Какая важная «деталь»!
Большой палец способен полностью противопоставляться остальным пальцам, благодаря чему мы можем совершать схватывания разной силы и точности. Его фаланга соединена с ближайшей костью запястья (а не с костью ладони), в противном случае он не смог бы достаточно отклоняться от указательного пальца и мы не смогли бы работать с инструментами. Какая важная «деталь»!
Не случайно также большой палец расположен со стороны указательного пальца (а не мизинца), что обращает кисти друг к другу, а не в противоположном направлении. При движении большого пальца задействуются 9 (!) разных мышц, а его движение настолько сложно, что только для описания движений одного его сустава используется 6 отдельных терминов. Теперь понятно, почему сэр Исаак Ньютон когда-то сказал: «При отсутствии иных свидетельств, один только большой палец убедил бы меня в существовании Бога».
Указательный палец обладает большой ловкостью и тонкой чувствительностью, а средний придает прочность захвату. Наш безымянный палец благодаря развитому осязанию регулирует мышечное чувство, что существенно при любой работе, а незаслуженно недооцененный нами мизинец придает устойчивость кисти при движениях в плоскости.
Специальные мышцы
Знали ли вы, что поскольку внутри пальцев нет мышц, мы работаем ими посредством «дистанционного управления»? Мышцы, сгибающие суставы пальцев, расположены в ладони и посередине предплечья. Они присоединены к костям пальцев сухожилиями, которые двигают пальцами как ниточки марионетки. Эти мышцы чрезвычайно сильные — некоторые люди взбираются по вертикальным поверхностям, поддерживая вес всего тела несколькими кончиками пальцев.
Мудрость Бога видна в создании в общей сложности 34 (!) специальных мышц, обеспечивающих движение кисти и пальцев. Их движение и взаимодействие настолько сложны, что для их описания было написано множество томов научной литературы! При этом мышцы и сухожилия в кисти помещены в особенные футляры. Футляры? Именно!
Они образовываются специальными мембранами (фасции) и служат для защиты и поддержания целостности. Совсем не похоже на то, чтобы здесь поработала случайная эволюция! Еще одно свидетельство замысла — присутствие специальных маленьких мышц между костями ладони для координации тонких и точных движений пальцев.
Уникальные схватывания
Кисть руки человека способна на два уникальных схватывания — точное (например, удерживание бейсбольного мячика) и силовое (захват перекладины рукой). В то время, как применение силы является главным при силовом обхвате, точное хватание используется при движениях, когда необходима четкость и тщательность — при приготовлении пищи, изготовлении инструментов и т.д. Точность достигается благодаря большому пальцу и множеству видов сжатий пальцами. Интересно, что эти два вида схватывания являются уникальным свойством кисти человека и в природе больше нигде не встречаются. И опять-таки эволюция не может объяснить это «исключение»!
Орган общения
Человеческая рука дополняет речь, передавая чувства и эмоции. Она прикасается, гладит, ласкает, выражая чувство любви. Кисть руки может «видеть» в темноте, распознавая углы и объекты. Подушечки пальцев являются еще и осязательными приборами, а ногти — это отнюдь не какой-то аксессуар.![]() Они играют важную роль в определении давления, необходимого пальцам, чтобы держать какой-то предмет.
Они играют важную роль в определении давления, необходимого пальцам, чтобы держать какой-то предмет.
Кожа со стороны ладони особенная. Она упругая и устойчивая к износу, но при этом чувствительная. Не случайно на ней полностью отсутствуют волоски и сальные железы. Внутри, под кожей ладони, расположена фасция — прочный листок соединительной ткани треугольной формы, который покрывает сверху мышцы. Если бы не эта ткань, то каждый раз при хватании наша ладонная кожа скользила бы по кисти, как перчатки.
Эволюция кисти?
Эволюционисты верят, что все растения, животные и люди произошли от первой примитивной клетки, которая, в свою очередь, случайно образовалась в «химическом бульоне» 3,5 миллиарда лет тому назад. Однако случайные мутации и отбор просто не могут создавать такие «чудо-инструменты», как рука человека.
Разумно ли верить в то, что вышеописанная сложная рука произошла из «химического бульона»? Абсолютно нет! Поразительная сложность кисти, глубокая взаимосвязь компонентов, «проработка» малейших деталей и т. д. — все свидетельствует о сотворении. Кисть руки человека значительно отличается от кисти шимпанзе.
д. — все свидетельствует о сотворении. Кисть руки человека значительно отличается от кисти шимпанзе.
Вот некоторые различия.
У шимпанзе большой палец короткий и слабый, а остальные пальцы длинные и изогнутые. Шимпанзе не может произвести сильное сжатие. У человека пальцы короче и прямые, большой палец длиннее, более мускулистый и подвижный, а также полностью противопоставлен остальным пальцам. Схватывания шимпанзе и человека значительно отличаются.
Сочленение в кисти человека намного сложнее и искуснее, чем у приматов, вследствие чего только человек может работать с разными инструментами. Кистью человек может жестикулировать, а также сжимать ее в кулак.
Запястье у людей более подвижно, чем у шимпанзе.
Язык жестов тяжел для обезьян, так как строение и нервный контроль руки человека намного сложнее. Переходные формы не обнаруживаются в летописи окаменелостей, а самые древние окаменелости гоминидов «сильно напоминают кисти шимпанзе, сохраняя признаки, необходимые для лазанья по деревьям». В отличие от человека все их пальцы длиннее большого пальца.
В отличие от человека все их пальцы длиннее большого пальца.
Вывод
Трудно не восхищаться гениальностью и элегантностью строения нашей кисти. Мир медицины и науки давно и упорно пытается произвести искусственный аналог руки. С точки зрения силы нынешние роботы ей не уступают.
Однако нельзя сказать того же об их чувствительности, мастерстве, ловкости и прочих качествах. И действительно, по единому мнению многих ученых, сделать робот, кисть которого имела бы все функции кисти человека, невозможно.
Инженер Ханс Шнебели, разработавший робототехническую руку под названием «Karlsruhe», отметил: «Чем больше я работаю над рукой-роботом, тем больше восхищаюсь кистью человека. Чтобы добиться хотя бы части той продуктивности, присущей человеческой кисти, потребуется еще много времени».
Мы испытываем благоговейный трепет перед нашим Творцом, Который сделал нас такими совершенными. Осознавая Его личную заботу, нам следует всегда быть благодарными за Его любовь. «Славлю Тебя, потому что я дивно устроен… Ибо Ты устроил внутренности мои и соткал меня во чреве матери моей. Не сокрыты были от Тебя кости мои, когда я созидаем был в тайне, образуем был во глубине утробы» (Псалом 100:10).
«Славлю Тебя, потому что я дивно устроен… Ибо Ты устроил внутренности мои и соткал меня во чреве матери моей. Не сокрыты были от Тебя кости мои, когда я созидаем был в тайне, образуем был во глубине утробы» (Псалом 100:10).
Дмитрий Куровский,
www.yeslovegod.com
Газета «Екклесиаст»
Строение и функции кисти рук человека
«Не интеллектуальные преимущества сделали человека властелином над всем живущим, но то, что одни мы владеем руками — этим органом всех органов», — писал Джордано Бруно.
Изучение антропогенеза показывает, что все органы человеческого тела развивались постепенно и приспособительно к условиям существования и имеют сегодня многие признаки пройденного пути.
Когда много тысяч лет назад человек встал на ноги и установилась прямая походка, руки его стали свободными. Прежде рука и нога одинаково участвовали в лазании, прыжках, хватании предметов. Теперь же ноги стали опорой, а руки, не обремененные никакой тяжестью, приобрели возможность стать чрезвычайно сложным инструментом.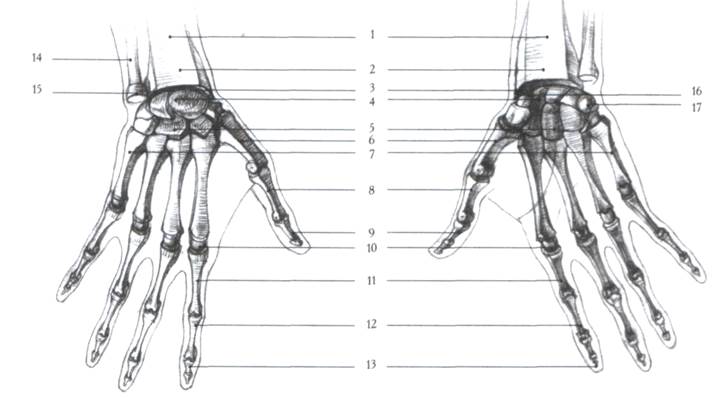 Если в устройстве ноги царит принцип соединения отдельных частей, укрепления их связей, то в руке каждый членик стремится стать свободным, каждый суставчик старается избавиться от своих оков, а каждое звено — получить индивидуальную отточенную форму. В процессе эволюции из трех звеньев руки (плечо, локоть и кисть) особую значимость приобретала ее конечная (дистальная) часть — кисть. Она становится не только исполнительницей воли, но и созидательницей, воспитательницей мозга. Территория проекции кисти и особенно большого пальца в передней и задней центральных извилинах коры больших полушарий мозга имеет почти такую же протяженность, как все остальное тело.
Если в устройстве ноги царит принцип соединения отдельных частей, укрепления их связей, то в руке каждый членик стремится стать свободным, каждый суставчик старается избавиться от своих оков, а каждое звено — получить индивидуальную отточенную форму. В процессе эволюции из трех звеньев руки (плечо, локоть и кисть) особую значимость приобретала ее конечная (дистальная) часть — кисть. Она становится не только исполнительницей воли, но и созидательницей, воспитательницей мозга. Территория проекции кисти и особенно большого пальца в передней и задней центральных извилинах коры больших полушарий мозга имеет почти такую же протяженность, как все остальное тело.
Для кисти большое значение имеет способность ее перемещения в пространстве. При заболеваниях с ограничением подвижности плечевого пояса, локтевого сочленения всегда страдает и функция кисти. Кисть — орган парный: обе руки дополняют друг, друга и увеличивают поле действия (производя синергетные и антагонистические движения). Между обеими руками имеется тесная связь через центральную нервную систему.
Между обеими руками имеется тесная связь через центральную нервную систему.
Функция кисти складывается из трех элементов. Вытянутая вперед рука, открытая, с прямыми пальцами служит лопатой, совком; согнутые пальцы — крючком, щипцами; более сложная функция — захват. При выполнении захвата человек в зависимости от цели движения, от характера объекта (размер, вес, форма, консистенция) образует из кисти каждый раз новый механизм. В основе разнообразных движений кисти лежат шесть видов захвата: клочковой, межпальцевый, плоскостный, щипковый, цилиндрический, шаровой.
Захватывание и удержание предметов;— сложный двигательный акт. Точность, прочность захвата осуществляются не только всеми отделами кисти — пальцами, пястью, запястьем, но в значительной мере зависят от функции надплечья, плеча, локтя, предплечья.
Запястье имеет сложное строение. Н. И. Пирогов писал: «Мы в целом скелете не находим другой части, которая бы подобно запястью, на пространстве не более двух дюймов, заключала в себе четырнадцать различных сочленений» (рис.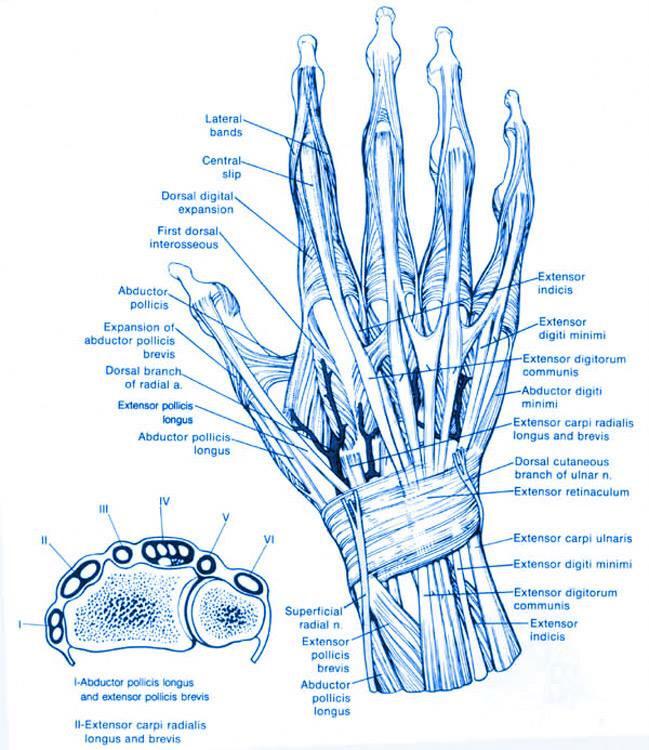
Рис. 1. Суставы и межкостные связки запястья и пясти:
1 — лучезапястное сочленение;
2 — межзапястное сочленение;
3 — запястно-пястное сочленение;
4 — внутризапястное сочленение;
5 — запястно-пястное сочленение большого пальца;
6 — связки между основанием пястных костей;
8 — суставной хрящ;
9 — дистальное лучелоктевое сочленение
Свод запястных костей и перекинутая над ним связка образуют запястный канал (рис.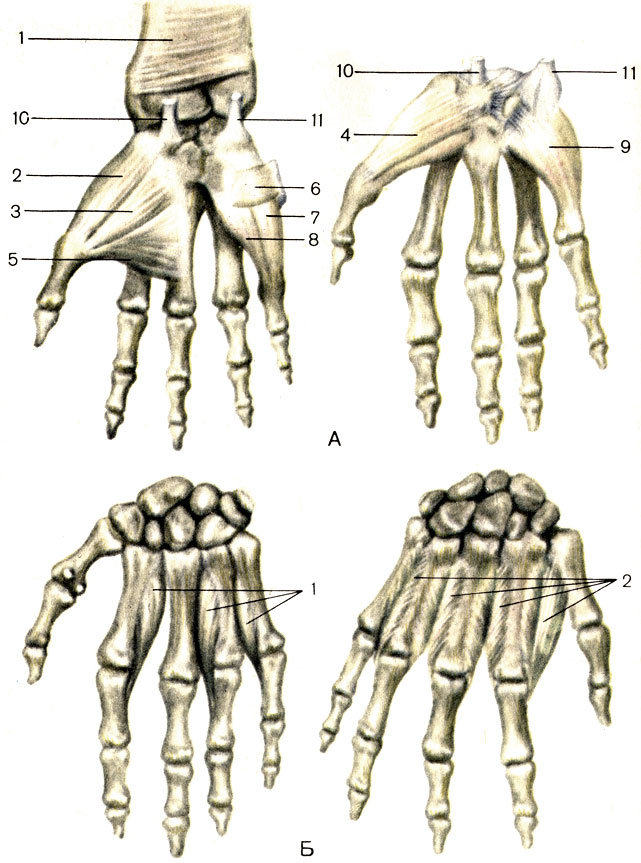 2). В центре канала проходят с предплечья на кисть сухожилия огибателен пальцев, срединный нерв с сопровождающими его сосудами. В лучевом канале проходят лучевая артерия и вена. Это самое поверхностное положение лучевой артерии, здесь отчетливо прощупывается пульс. В локтевом влагалище запястья проходят локтевой нерв и сосуды. На тыльной поверхности запястья нет канала, но над выпуклым сводом также имеется плотная широкая связка с перемычками, образующая шесть каналов. В этих каналах, окруженных влагалищами, с предплечья на кисть проходят лучевой нерв и сухожилия разгибателей пальцев. Кожа над запястьем тонкая, подвижная, образует борозды и складки. В кистевом суставе возможны сгибание, разгибание, отклонение кисти в лучевую, локтевую сторону и вращение.
2). В центре канала проходят с предплечья на кисть сухожилия огибателен пальцев, срединный нерв с сопровождающими его сосудами. В лучевом канале проходят лучевая артерия и вена. Это самое поверхностное положение лучевой артерии, здесь отчетливо прощупывается пульс. В локтевом влагалище запястья проходят локтевой нерв и сосуды. На тыльной поверхности запястья нет канала, но над выпуклым сводом также имеется плотная широкая связка с перемычками, образующая шесть каналов. В этих каналах, окруженных влагалищами, с предплечья на кисть проходят лучевой нерв и сухожилия разгибателей пальцев. Кожа над запястьем тонкая, подвижная, образует борозды и складки. В кистевом суставе возможны сгибание, разгибание, отклонение кисти в лучевую, локтевую сторону и вращение.
Рис. 2. Поперечный распил через дистальный отдел предплечья: 1 — сухожилия поверхностных и глубоких мышц, сгибающих пальцы; 2 — окутывающее их влагалище; 3 — квадратная вращающая мышца; 4 — срединный нерв; 5 — сухожилие лучевого сгибателя кисти; 6 — лучевая артерия ф фасциальном влагалище; 7 — локтевая артерия; 8 — локтевой сгибатель кисти; 9 — сухожилие плечелучевой мышцы; 10 — сухожилие длинной отводящей и короткой разгибающей мышцы большого пальца; 11 — сухожилие длинного разгибателя большого пальца
Основное значение запястья — образование плотного, подвижного свода, соединяющего предплечье посредством пясти с главной частью руки — пальцами. Кроме того, запястье выполняет функцию амортизатора, ослабляет толчки, сотрясения, оно сохраняет постоянство мышечного равновесия кисти. Запястье — ключ, открывающий или запирающий функцию кисти.
Кроме того, запястье выполняет функцию амортизатора, ослабляет толчки, сотрясения, оно сохраняет постоянство мышечного равновесия кисти. Запястье — ключ, открывающий или запирающий функцию кисти.
Основу пястья составляют пять пястных костей, имеющих различную длину и толщину. Благодаря различной длине головки II—III—IV—V пястных костей соединяются, образуя дугу с выпуклостью к тылу. Первая пястная кость короче и толще других, имеет седловидную поверхность для сочленения с запястной костью. Это сочленение укреплено прочными короткими, веерообразными связками, обширной капсулой, что обеспечивает I пальцу наибольшую свободу движений и противопоставление его другим пальцам. На пясти с предплечья проходят сухожилия длинных мышц сгибателей н разгибателей пальцев, здесь же имеются короткие собственные мышцы кисти. Они расположены на ладонной стороне и разделены на три группы: мышцы возвышения большого пальца, мышцы возвышения мизинца и мышцы ладонной впадины.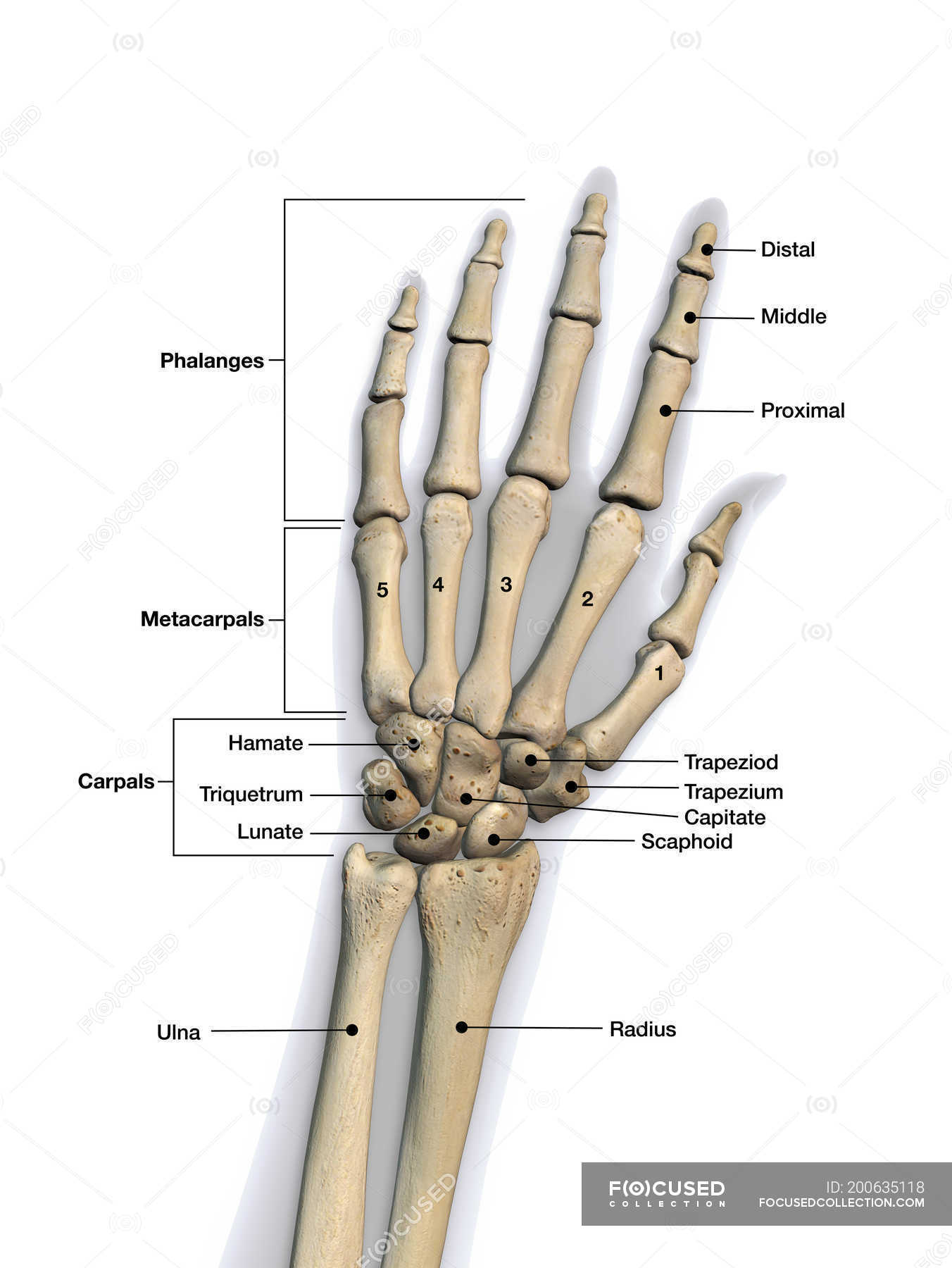
Главной структурой в кисти являются пальцы. Каждый из них, кроме первого, состоит из трех костей фаланг; проксимальной, средней и дистальной (ногтевой). Первые две сходны по строению и различаются размерами, а также формой суставных поверхностей. Проксимальные фаланги имеют шаровидную суставную поверхность для сочленения с пястными костями, обеспечивающую значительный диапазон движений пальцев. Межфаланговые суставы одноосные, форма их суставных поверхностей обеспечивает лишь сгибание и разгибание. Дистальные фаланги отличаются тем, что они уплощены, имеют меньшие размеры и заканчиваются ногтевыми бугристостями.
Особым анатомическим строением, соответствующим его роли в работе кисти, обладает I большой палец. Он имеет только две короткие и более массивные фаланги, В целом анатомическая структура большого пальца устроена таким образом, чтобы обеспечить ему большую, чем у других пальцев, подвижность и устойчивость, а также оппозицию ко всем другим пальцам.
Основное назначение вспомогательных соединительнотканных приборов кисти — обеспечение удержания, скольжения и взаимодействия сухожилий сгибателей и разгибателей пальцев. Сухожилия сгибателей окружены влагалищами, начинающимися на уровне пястно-фаланговых суставов и заканчивающимися у основания дистальных фаланг. Они представляют собой цилиндрические каналы, образованные двумя слоями тканей. Внутренний слой сухожильного влагалища — синовиальная оболочка, окружающая сухожилие, наружный слой — прочная фиброзная ткань. Влагалище содержит небольшое количество синовиальной жидкости, облегчающей скольжение сухожилий. Влагалища сгибателей I и V пальцев не замыкаются в области пястно-фаланговых суставов, а проходят через запястный канал соответственно в лучевую и локтевую синовиальную сумки.
Сухожилия сгибателей окружены влагалищами, начинающимися на уровне пястно-фаланговых суставов и заканчивающимися у основания дистальных фаланг. Они представляют собой цилиндрические каналы, образованные двумя слоями тканей. Внутренний слой сухожильного влагалища — синовиальная оболочка, окружающая сухожилие, наружный слой — прочная фиброзная ткань. Влагалище содержит небольшое количество синовиальной жидкости, облегчающей скольжение сухожилий. Влагалища сгибателей I и V пальцев не замыкаются в области пястно-фаланговых суставов, а проходят через запястный канал соответственно в лучевую и локтевую синовиальную сумки.
Ладонный апоневроз или фасция — плотная треугольная пластина, прикрывающая ладонную чашу. Основанием она обращена к пястно-фаланговым суставам II—V пальцев, вершиной подходит к запястью, где переходит в сухожилие длинной ладонной мышцы (рис. 4).
Рис. 4. Ладонный апоневроз: 1 — сухожилие длинной ладонной мышцы; 2 — удерживатель сгибателей; 3 — короткая ладонная мышца; 4 — ладонный апоневроз; 5 — предсухожильные ленты ладонного апоневроза; 6 — поперечные пучки ладонного апоневроза; 7 — «окно» ладонного апоневроза; 8 — проксимальные завороты сухожильных влагалищ
В ладонном апоневрозе различают два вида волокон.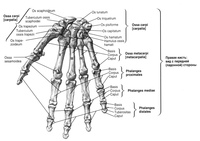 Волокна продольного направления, над сухожилиями сгибателей II—V пальцев, образуют предсухожильные ленты, переходящие на боковые поверхности пальцев. Поперечные пучки ладонного апоневроза лежат глубже, поддерживают свод пясти, тесно связаны со скелетом кисти, образуя каналы для прохождения сухожилий сгибателей.
Волокна продольного направления, над сухожилиями сгибателей II—V пальцев, образуют предсухожильные ленты, переходящие на боковые поверхности пальцев. Поперечные пучки ладонного апоневроза лежат глубже, поддерживают свод пясти, тесно связаны со скелетом кисти, образуя каналы для прохождения сухожилий сгибателей.
Сухожилия разгибателей имеют синовиальные влагалища на тыльной стороне кисти в области запястья и основания пясти. Они проходят здесь через шесть костно-фиброзных и фиброзных каналов, образованных тыльной поперечной связкой запястья, перекинутой от краев лучевой и локтевой костей предплечья (рис. 5).
Рис. 5. Тыл кисти: синовиальное влагалище, запястный канал и разгибательный аппарат кисти и пальцев: 1 — зона воспаления межмышечной соединительной ткани; 2 — первый тыльный канал запястья — зона стеноза при лигаментите; 3 — фиброзные соединения сухожилий разгибателей пальцев; 4 — сухожилия разгибателя пальцев, их синовиальное влагалище — IV запястный канал
Разгибательный аппарат пальцев — функциональное единство общего разгибателя пальцев и собственных мышц кисти, образующих на пальцах тыльный разгибательный аппарат. Он имеет форму треугольной пластинки, вершина которой у основания ногтя, а углы (как капюшон) вплетаются в сухожилия коротких собственных мышц кисти.
Он имеет форму треугольной пластинки, вершина которой у основания ногтя, а углы (как капюшон) вплетаются в сухожилия коротких собственных мышц кисти.
Обильное снабжение кровью кисть и пальцы получают от магистральных сосудов шеи и плеча. Артериальная сеть более выражена на ладонной поверхности, венозная на тыльной. Основное кровоснабжение происходит от лучевой и локтевой артерий, отдающих по ходу многочисленные ветви к I пальцу, запястью, пясти, образуя глубокую и поверхностную дуги. От дуг отходят к каждому пальцу специальные артерии и вены с многочисленными анастомозами и ветвями к отдельным структурам и сетью капилляров в дистальных фалангах. Обильно представлена на кисти и сеть лимфатических сосудов.
Двигательную и чувствительную иннервацию кисти и пальцев осуществляют: лучевой, локтевой и срединный нервы, идущие от плечевого сплетения. Подобно сосудам нервы проходят на кисть через запястный канал, каждый в своем ложе. На пясти они делятся на пальцевые нервы, обеспечивая чувствительность определенных участков кисти и пальцев (рис. 6). Однако схематично очерченные зоны иннервации лучевого, локтевого и срединного нерва на кисти и пальцах изменчивы; многочисленные кожные ветви нервов часто распространяются за пределы стандартных границ, а иногда не достигают их.
6). Однако схематично очерченные зоны иннервации лучевого, локтевого и срединного нерва на кисти и пальцах изменчивы; многочисленные кожные ветви нервов часто распространяются за пределы стандартных границ, а иногда не достигают их.
Рис. 6. Схема распределения кожной иннервации на кисти и пальцах. Территории нервов: 1 — лучевого; 2 — срединного; 3 — локтевого; 4 — медиального кожного нерва предплечья; 5 — заднего кожного нерва предплечья; о — латерального кожного нерва предплечья
Немалую роль в строении кисти играет и подкожная жировая ткань. Она плотно заполняет фасциальные пространства, защищает глубже лежащие сухожилия, сосуды и нервы, придает эластичность, позволяет ладони и пальцам приспосабливаться к форме захватываемых предметов. Подкожная жировая клетчатка расположена на кисти неравномерно: на ладонной стороне ее значительно больше, чем на тыльной, да и строение самой ткани неоднородно. На кончиках и у основания пальцев в клетчатке имеются упругие, эластичные, чувствительные осязательные мякиши. На тыле и запястье кисти жировая клетчатка рыхлая и в меньшем количестве.
На тыле и запястье кисти жировая клетчатка рыхлая и в меньшем количестве.
В соответствии функциональному назначению строение, кровоснабжение и иннервация кожи кисти различны на тыле и ладони. На тыле кисти кожа часто покрыта пушковыми волосами, тонка, берется в складку, Через нее просвечивает венозная сеть. Она более богата венозными и лимфатическими сосудами и беднее артериальными. Кожа ладонной поверхности на запястье тонка, малоподвижна, через нее тоже просвечивают вены. На ладони кожа плотнее, теплее, богата артериальными сосудами, малоподвижна. На коже ладони и пальцев есть борозцы-складки, имеющие индивидуальный для каждого человека рисунок. Тонкость ощущений, свойственная ладони и пальцам, обусловлена отсутствием волосяного покрова, большим числом нервных окончаний с наличием осязательных телец, сосредоточенных в области мякишей у основания и на кончиках пальцев. Иннервация кожи осуществляется за счет всех основных нервов кисти: срединного, локтевого и лучевого. Конечные кожные ветви этих нервов всегда перекрывают друг друга, что обеспечивает пластичность нервной деятельности органа и компенсаторные его возможности.
Конечные кожные ветви этих нервов всегда перекрывают друг друга, что обеспечивает пластичность нервной деятельности органа и компенсаторные его возможности.
Ноготь — производное кожного покрова, прозрачная пластина, образованная ороговевшими клетками. Через ноготь просвечивают капилляры кровеносных сосудов, что придает пластине розовый оттенок. Ногтевая пластина по бокам и у основания окружена ногтевым валиком, под которым заложен матрикс — ростковый слой ногтя. При повреждении ногтя, при сохранившемся матриксе, ноготь вырастает за 4—5 месяцев.
Функция кисти уникальна и универсальна. Она — основной орган труда во всем его многообразии: от работы грузчика и молотобойца до исполнительской деятельности скрипача.
Функциональное значение отдельных частей и структур кисти и их взаимосвязь изучаются с древних времен и до наших дней. Все то, что есть в человеке неуловимого, невыразимого, что не находит слов, ищет выражения через руку.
Каждый палец имеет свою значимость и роль, но II, III, IV, V склонны действовать в унисон, а большой I палец предпочитает независимую функцию. Индейцы называют большой палец руки матерью, сомалийцы — дедушкой, малайцы — старшим братом остальных пальцев, В древности пленникам отрубали большой палец руки, дабы навсегда сделать их негодными для полноценного труда и военной службы.
Указательный палец, хотя и находится рядом с другими, однако более независим в движениях. Этот палец обладает большой ловкостью и тонкой чувствительностью. Им первым начинают захват.
III — средний палец более массивный и длинный, придает прочность захвату. Длительно удерживать в руке предметы при отсутствии III пальца трудно.
IV — безымянный палец, благодаря развитому осязанию регулирует мышечное чувство, что существенно при любой работе.
V — мизинец, закрепляет захват, закрывает ладонную чашу, придает устойчивость кисти при движениях по плоскости.
Говоря о функции кисти как рабочего органа, необходимо отметить, что она существует и не может рассматриваться отдельно от всего организма. Физическое и психическое состояние человека сказывается и на функции кисти. В народе широко распространены поговорки, отмечающие тесную связь между активностью кисти и психическим состоянием: «все из рук валится», «руки опускаются» и т. п.
Осязание. Основные нервные осязательные приборы заложены в жировой клетчатке, коже, на кончиках пальцев и у их основания на ладони в «мякише-пульте». Они состоят из жировых долек, окутанных сетью артериовенозных, лимфатических сосудов, капилляров, и пронизаны чувствительными нервными окончаниями. Жировые подушечки на кончиках пальцев — «вместилище глаза», они имеют для функции кисти особое значение, в них заложено восприятие тактильного гнозиса, позволяющее слепому различать форму, величину, температуру, положение, причем так детально, что можно книгу читать пальцами.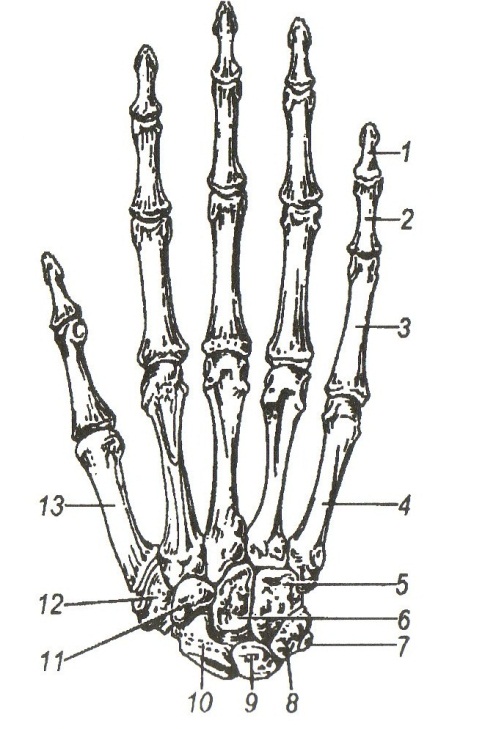
Жест. Рука настолько связана с нашим мышлением, с переживаниями, трудом, что стала вспомогательной частью нашего языка. Все, что человек не может высказать, чему он не находит слов, выражается движением руки — жестом. Жест, как слово, может возвысить человека, успокоить, оскорбить, приласкать, вселить веру в правое дело, подтвердить слова, сделать их болей весомыми.
Таким образом, кратко рассмотрев строение кисти человека, остановившись на некоторых ее функциях, мы можем с полным основанием сказать, что она — универсальный орган, посредник человека в соприкосновении с внешним миром.
Кости кистей рук человека строение и их функции. Анатомия человека
Кости рук и кистей, выполняют важные функции поддержки верхних конечностей и обеспечение крепления для мышц, которые двигают верхние конечности. Эти кости образуют суставы, которые обеспечивают широкий диапазон движений и гибкость, необходимую, чтобы ловко манипулировать предметами с помощью силы рук. Они также обеспечивают прочность, чтобы противостоять экстремальным напряжениям, действующим на плечи и руки во время занятий спортом, тренировок и тяжелого труда … [Читайте ниже]
Они также обеспечивают прочность, чтобы противостоять экстремальным напряжениям, действующим на плечи и руки во время занятий спортом, тренировок и тяжелого труда … [Читайте ниже]
Кзади от ключицы находится лопатка — треугольной формы, плоская кость, расположенная латеральнее грудного отдела позвоночника в спинной области тела. Лопатки формируют суставы в двух местах: акромиально-ключичное сочленение — ключицы и плечевого сустава и ключицы с плечевой костью. Суставная впадина расположена на боковом торце лопатки и образует гнездо для плечевого сустава. Многие мышцы прикрепляются к лопаточной кости, чтобы перемещать плечо, в том числе трапециевидные, дельтовидные, ромбовидные, и мышцы вращающие плечо.
Лопатки формируют суставы в двух местах: акромиально-ключичное сочленение — ключицы и плечевого сустава и ключицы с плечевой костью. Суставная впадина расположена на боковом торце лопатки и образует гнездо для плечевого сустава. Многие мышцы прикрепляются к лопаточной кости, чтобы перемещать плечо, в том числе трапециевидные, дельтовидные, ромбовидные, и мышцы вращающие плечо.
Плечевые кости
— это только кости верхней части руки. Длинные, большие кости, которые тянутся от лопатки плеча и до локтевой и лучевой костям в предплечье. Проксимальный конец плечевой кости — круглая структура, которая формирует шар для плечевого сустава. На дистальном конце, плечевая кость образует широкую, цилиндрическую структуру, которая образуют внутренний шарнир локтевого сустава из локтевой и лучевой костей. Грудные, дельтовидные, широчайшие мышцы спины и вращающие плечо мышцы, прикрепляются к плечевой кости, чтобы повернуть, поднять и опустить руку в плечевом суставе.
Предплечья содержат две длинных, параллельных кости: локтевую и лучевую. Локтевая кость длиннее и большая из двух костей, расположена на медиальной (со стороны мизинца) стороне предплечья.
Локтевая кость длиннее и большая из двух костей, расположена на медиальной (со стороны мизинца) стороне предплечья.
Самый широкий участок — на её проксимальном конце и значительно суженный в дистальном. На проксимальном конце локтевой кости имеется шарнир локтевого сустава с плечевой костью. Конец локтевой кости, известный как локтевой отросток, распространяется на плечевую кость и образует костный кончик локтя. На дистальном конце, локтевая кость образует лучезапястный сустав с лучевым и запястным суставом.
По сравнению с локтевой костью, лучевая немного короче, тоньше, и расположена на латеральной стороне предплечья. Лучевая кость наиболее узкая в локтевом суставе и расширяется ближе к запястью. На её проксимальном конце, округлые головки лучевой кости образуют поворотную часть локтевого сустава, которая разрешает поворот предплечья и кисти. На дистальном конце, она гораздо шире, чем локтевая кость и образует основную массу лучезапястного сустава и с локтевой составляет запястный сустав. Дистальный конец лучевой кости также вращается вокруг локтевой кости, когда рука и предплечье вращаются.
Дистальный конец лучевой кости также вращается вокруг локтевой кости, когда рука и предплечье вращаются.
Несмотря на небольшие размеры, руки содержат двадцать семь мелких косточек и множества гибких суставов.
Запястные суставы представляют собой группу из восьми кубовидных костей. Они образуют лучезапястный сустав с локтевой и лучевой костями предплечья, а также формируют суставы запястья на ладони. Запястные суставы образуют много мелких суставов, скользя друг с другом, чтобы дать дополнительную гибкость запястья и кисти.
Пять длинных, цилиндрической формы пястных костей поддерживают форму ладони. Каждая пястная кость образует сустав с запястьем и еще один совместный с проксимальным фалангом пальца. Пястные кости также придают гибкость рукам при захвате объекта или при нажатии на большой палец и мизинец вместе.
Фаланги
Представляют собой группу из четырнадцати костей, которые поддерживают и перемещают пальцы. Каждый палец содержит до трёх фаланг – дистальную, среднюю и проксимальную – за исключением большого пальца, который содержит только проксимальную и дистальную фаланги.
Фаланги длинных костей образуют шарнирные соединения между собой, а также мыщелок суставов с пястными костями. Эти швы позволяют сгибание, разгибание, разведение и приведение пальцев.
Руки требуют баланс силы и ловкости для выполнения различных задач, таких как подъем тяжестей, плавания, игры на музыкальном инструменте и возможности писать.
Суставы рук и мышцы обеспечивают широкий диапазон движения, сохраняя прочность верхних конечностей. Как и все кости организма, кости верхней конечности помогают организму в поддержании гомеостаза, сохраняя минералы и жиры и вырабатывая клетки крови в красном костном мозге.
Точность дистанционного определения температуры тела человека по результатам измерения температуры лба и запястья
Виталий Ценин, главный специалист дирекции комплексных систем безопасности ГКС
Для профилактики коронавирусной инфекции Роспотребнадзор рекомендует работодателям проводить в рабочих коллективах «контроль температуры тела работников при входе работников в организацию (предприятие), и в течение рабочего дня (по показаниям), с применением аппаратов для измерения температуры тела бесконтактным или контактным способом (электронные, инфракрасные термометры, переносные тепловизоры) с обязательным отстранением от нахождения на рабочем месте лиц с повышенной температурой тела и с признаками инфекционного заболевания».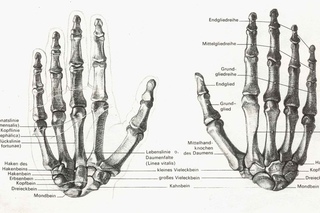 («О рекомендациях для работодателей по профилактике коронавирусной инфекции на рабочих местах». https://www.rospotrebnadzor.ru/about/info/news/news_details.php?ELEMENT_ID=14190 )
(«О рекомендациях для работодателей по профилактике коронавирусной инфекции на рабочих местах». https://www.rospotrebnadzor.ru/about/info/news/news_details.php?ELEMENT_ID=14190 )
Соответственно, задача выбора оборудования для выполнения рекомендаций Роспотребнадзора по контролю температуры тела сотрудников сегодня стоит перед всеми российскими компаниями.
И при этом отмечается, что «…в России взлетел спрос на тепловизоры — оборудование, с помощью которого можно быстро и точно измерить температуру тела человека на расстоянии».
https://iz.ru/985757/ekaterina-iasakova/novoe-izmerenie-spros-na-teplovizory-vyros-v-sto-raz
Эксперты ГКС подготовили настоящий обзор, в котором детально сравниваются два способа определения температуры человека – по температуре лба и запястья для следующих измерительных устройств, пользующихся спросом на рынке:
- Uniview OET-213H-BTS1
- Uni-Ubi модель Uface 8
- внешний термометр UFACE-TEMP01-ST-XCC (os-m385c2-v-r23wfc)
Компания Uniview для определения температуры тела человека предлагает устройства для измерения температуры запястья, одновременно обеспечивающие распознавание лиц, в то время как большинство других производителей подобных терминалов с распознаванием лиц предлагают измерять температуру лба человека.
При проведении испытаний терминала Uniview OET-213H-BTS1 ставились задачи получить ответы на следующие вопросы:
- В чем отличие измерений температуры запястья и лба?
- Насколько точны измерения температуры запястья? Влияет ли расстояние от запястья до считывателя при измерении температуры?
- Насколько точно пользователь должен позиционировать руку при измерении температуры запястья?
- Какое влияние оказывают длинные рукава или наручные аксессуары на измерение температуры?
1. В чем отличие измерений температуры запястья и лба?
Uniview объясняет использование измерения температуры запястья тем, что запястье меньше подвержено влиянию окружающей среды или каких-либо физиологических факторов.
Температура кожи открытого лба не так стабильна и зависит от температуры воздуха и скорости ветра — эти факторы могут привести к ошибкам и повлиять на точность измерения температуры.
2. Насколько точны измерения температуры запястья? Влияет ли расстояние от запястья до считывателя при измерении температуры?
Uniview называет оптимальным расстояние считывания температуры в диапазоне от 1 см до 2,5 см, хотя считыватель производит измерения и за пределами этого диапазона, что является определенной проблемой для обеспечения точности измерений. Измерение температуры запястье производится достаточно точно и надежно на очень близком расстоянии, почти касаясь считывателя. На указанных Uniview расстояниях от 1 см до 2,5 см результаты измерений были часто на 0,3° С ниже. И поскольку считыватель не имеет функции определения расстояния до запястья, то появляется возможность считывать данные на расстоянии до 10 см без уведомления субъекта или операторов. Измеренная температура при этом уменьшается примерно на 0,8° С.
Измерение температуры запястье производится достаточно точно и надежно на очень близком расстоянии, почти касаясь считывателя. На указанных Uniview расстояниях от 1 см до 2,5 см результаты измерений были часто на 0,3° С ниже. И поскольку считыватель не имеет функции определения расстояния до запястья, то появляется возможность считывать данные на расстоянии до 10 см без уведомления субъекта или операторов. Измеренная температура при этом уменьшается примерно на 0,8° С.
3. Насколько точным пользователь должен позиционировать руку при измерении температуры запястья?
Модуль температуры запястья не обладает никаким интеллектом и будет измерять температуру любой части руки, поднесенной к датчику. При испытаниях была установлена разница в температуре около 0,2…0,3°C между различными частями руки. При этом ладонь самая теплая, а внешняя часть предплечья — самая холодная. Это означает, что температура предплечья, внешней части кисти и ладони может быть измерена точно так же, как и температура запястья до тех пор, пока показания находятся ниже порога срабатывания предупреждения.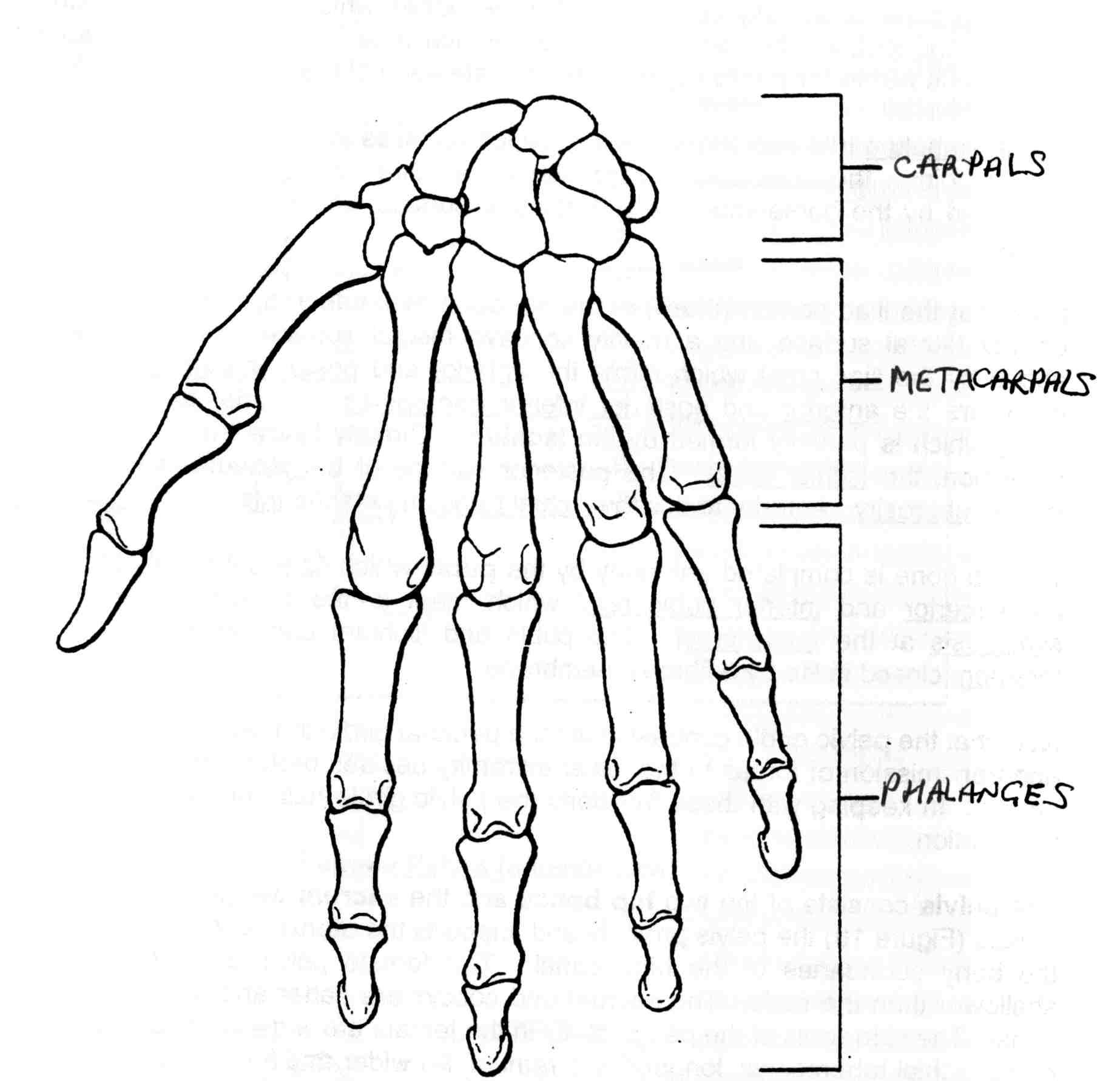 Поэтому терминал Uniview OET-213H-BTS1 не рекомендуется использовать без контролирующего персонала.
Поэтому терминал Uniview OET-213H-BTS1 не рекомендуется использовать без контролирующего персонала.
Uniview указывает, что точка «нэй-гуань», расположенная примерно на три пальца ниже ладони (см. фото) является оптимальной мишенью для измерения температуры запястья. Действительно, в нашем тестировании температура вокруг этой точки существенно не менялась.
4. Какое влияние оказывают длинные рукава или наручные аксессуары на измерение температуры?
Uniview рекомендует пользователям освободить область запястья для точного измерения температуры (закатать рукава, убрать часы и ювелирные изделия). В проведенных испытаниях при измерении через рукав значение температурам было обычно ниже на 1°С (около 35,6°С при температуре 36,6°С). Наличие часов оказывало меньшее влияние на результаты измерения температуры запястья.
Компания Uni-Ubi предлагает устройства дистанционного измерения температуры лба.
При проведении испытаний терминала контроля доступа с распознаванием лиц и измерением температуры Uni-Ubi модель Uface 8 и внешнего термометра UFACE-TEMP01-ST-XCC ставились задачи получить ответы на следующие вопросы:
- Насколько точны измерения температуры лба? Влияет ли расстояние от лба до считывателя при измерении температуры?
- Насколько точно должен пользователь позиционировать лицо при измерении температуры лба?
- Какое влияние оказывают длинные волосы или поворот головы?
1. Насколько точны измерения температуры лба? Влияет ли расстояние от лба до считывателя при измерении температуры?
Uni-Ubi не регламентирует расстояние от лба до считывателя при измерении температуры. При этом ни терминал Uface 8, ни внешний термометр UFACE-TEMP01-ST-XCC также не имеют функции определения расстояния до лба. При этом, как показали испытания, измерение может производиться и на расстоянии более 30 см. Ни субъект, ни оператор оповещаться при этом не будут. Измеренная температура уменьшается с увеличением расстояния считывания примерно на 2 градуса, при расстояниях считывания от 15 до 30 см.
Измеренная температура уменьшается с увеличением расстояния считывания примерно на 2 градуса, при расстояниях считывания от 15 до 30 см.
Надо отметить, что для корректного измерения температуры лба данными устройствами требуются определенные условия, в частности, температура воздуха в помещении должна быть порядка 20-22°С.
2. Насколько точно должен пользователь позиционировать лицо при измерении температуры лба?
Модуль температуры лба не обладает никаким интеллектом и будет измерять любую представленную часть лица.
3. Какое влияние оказывают длинные волосы или поворот головы?
В проведенных испытаниях при измерении температуры части головы, закрытой волосами, показания снижались — обычно до 35°С при нормальной температуре. Аналогичная ситуация наблюдается и при повороте головы – показания стабильно снижаются и не достигают порога срабатывания предупреждения. Таким образом, наличие длинных волос или поворот головы не приводят к фиксации ложноположительного результата.
Дополнительная информация по терминалам Uniview OET-213H-BTS1 и Uni-Ubi модель Uface 8:
- терминалы могут идентифицировать человека по лицу и передавать его идентификатор в СКУД здания по Wiegand интерфейсу
- терминалы обладают встроенной памятью для хранения базы данных лиц:
- Uniview — до 10 000 единиц
- Uni-Ubi — до 100 000 единиц
- терминалы могут отслеживать наличие медицинской маски на лице
- терминалы имеют API и SDK для интеграции со сторонними приложениями
Подводя итоги результатов испытаний, можно сделать следующие выводы:
- Измерение температуры запястья производится, как правило, на более близком расстоянии (до 10 см) и при этом показывает несколько более стабильные результаты по сравнению с измерением температуры лба.
- Измерение температуры желательно проводить в присутствии персонала для контроля точности позиционирования запястья или головы человек относительно прибора.

- В случае, если запястье закрыто рукавом или на лоб падают волосы приборы показывают результаты, заниженные на 1-1,5°С.

Таким образом при выборе подобных устройств следует определиться с удобным местом размещения – на уровне головы для измерения температуры лба, либо на уровне пояса для измерения температуры запястья. В остальном устройства обеспечивают точность измерений, достаточную для выявления повышенной температуры тела человека и одинаково хорошо подходят для выполнения рекомендаций Роспотребнадзора.
Рука помощи: как устроен бионический протез
Фото: A.R.M. Project Titanium
В следующем году холдинг «Технодинамика» Госкорпорации Ростех начнет серийное производство бионических протезов руки. Разработчики ставят перед собой амбициозную задачу – создать собственный «автомат Калашникова» в сфере бионического протезирования. Кроме того, разработки в этой тематике ведут холдинги «Швабе» и КРЭТ.
Кроме того, разработки в этой тематике ведут холдинги «Швабе» и КРЭТ.
Для людей, лишившихся руки, бионический протез – это возможность почувствовать себя не инвалидом, а супергероем. Как отмечают создатели, такие протезы могут быть адаптированы и для использования на сложных и опасных производствах. Например, при дистанционной работе с огне- и взрывоопасными составами или в агрессивной среде.
О том, какие новые возможности предоставляет современная бионика и как устроен новейший бионический протез – в нашем материале.
Запчасти для человека
О замене утраченных органов человечество задумывалось с древних времен, постепенно совершенствуя эту область знаний и сами протезы. Если первые протезы в основном имели эстетическое предназначение и визуально скрывали ущербность, лишь в редких случаях выполняя функции недостающих органов, то современные устройства в недалеком будущем смогут даже расширить возможности человека, сделав из него кибернетический организм, или киборга.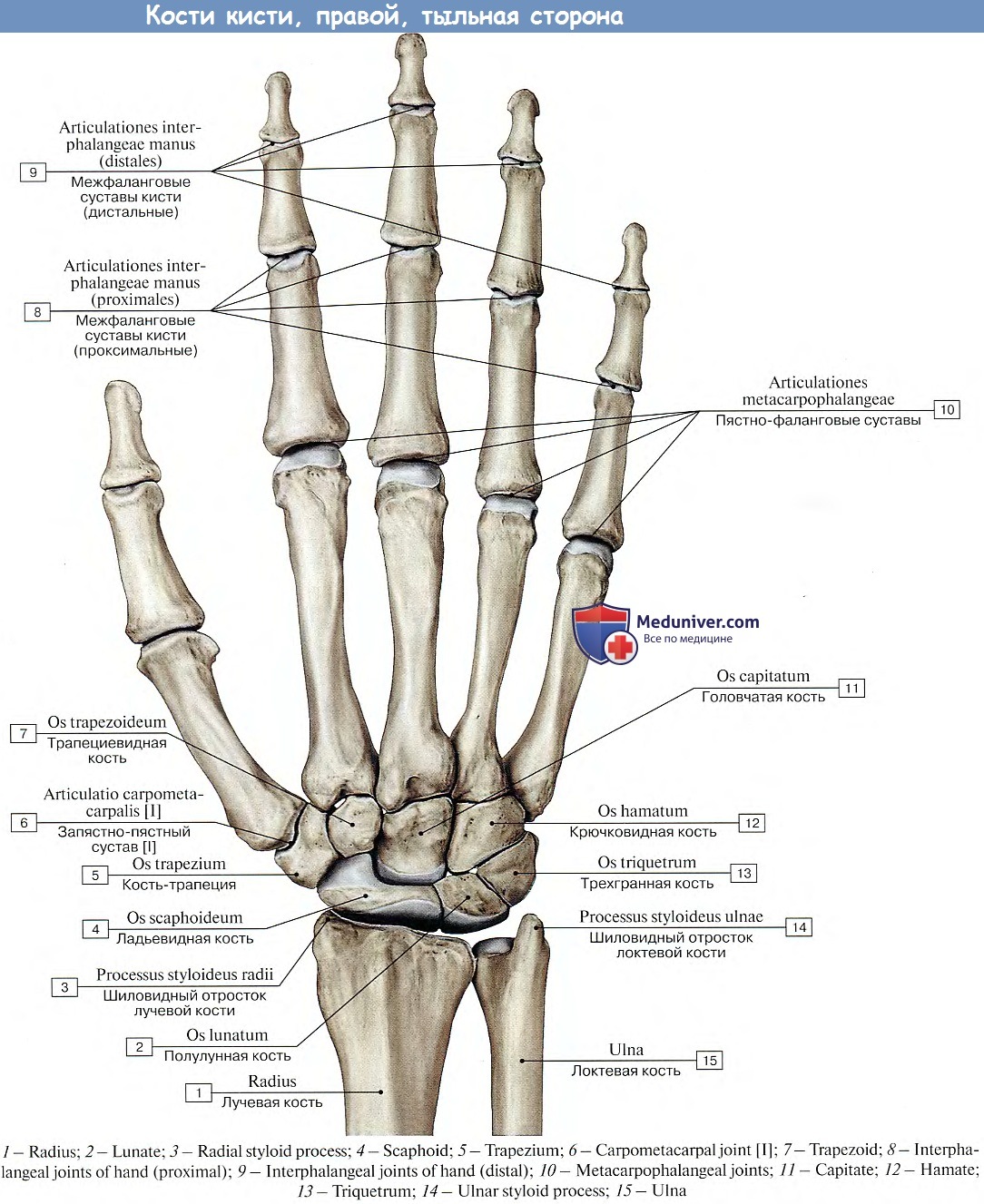
Несмотря на то что киборгизация человечества все еще выглядит сюжетом из фантастики, киборги уже живут среди нас, ведь так можно назвать любого человека, который использует механический или электронный протез или имплант. Сегодня одним из самых совершенных и при этом доступных видов протезирования верхних конечностей являются бионические протезы.
Бионика – наука, изучающая возможности применения свойств живой природы в технике. Впервые это слово употребил в 1958 году американский военный врач Джек Стил, который исследовал природные процессы и явления, чтобы применить эти знания в разработках для армии США. Одним из результатов развития бионики стало появление электронных протезов, которые могут взаимодействовать с нервными клетками человека.
Примечательно, что в СССР подобные разработки начались еще в 1956 году, когда доктор биологических наук Яков Славуцкий описал физиологические аспекты биоэлектрического управления протезами. А уже в 1961 году начался промышленный выпуск советских протезов предплечья с биоэлектрическим управлением.
А уже в 1961 году начался промышленный выпуск советских протезов предплечья с биоэлектрическим управлением.
Стать киборгом за счет государства
В России около 200 тысяч человек нуждаются в протезировании рук или ног. Государство декларирует помощь в приобретении протеза, но на практике это часто оказывается проблематичным – либо очень сложно пройти через бюрократические препоны и получить компенсацию стоимости купленного за свои деньги протеза, либо выделяемые бесплатно протезы оказываются устаревших моделей и низкого качества. Еще одна проблема – сами инвалиды мало знают о современных протезах и о своих возможностях в получении технических средств реабилитации.
Но ситуация постепенно выравнивается. В рамках нацпроекта «Здоровье» увеличивается финансирование направления. В России за последние несколько лет появились свои стартапы разработчиков перспективных типов протезов, которые могут конкурировать с западными монополистами, по меньшей мере, на российском рынке. К теме проявляют интерес СМИ, шаг за шагом создается инфополе, у проектов появляются частные и государственные инвесторы, готовые поддержать деньгами и производственными возможностями.
К теме проявляют интерес СМИ, шаг за шагом создается инфополе, у проектов появляются частные и государственные инвесторы, готовые поддержать деньгами и производственными возможностями.
Важным стимулом к развитию функциональных протезов стало развитие технологий. Практически все современные промышленные тренды нашли отражение в протезировании конечностей – роботизация, искусственный интеллект, создание материалов нового поколения, увеличение емкости и снижение веса аккумуляторных устройств, 3D-печать и другие.
Как работает бионическая рука
Бионический или биоэлектрический протез рождается на стыке наук – биологии, медицины, инженерии. Дизайн тоже играет немаловажную роль. Сегодня и производители, и будущие пользователи протезов не ограничивают себя в визуальном копировании природной конечности – протез может выглядеть футуристичной рукой робота или быть раскрашенным яркими принтами.
Работает бионический протез так.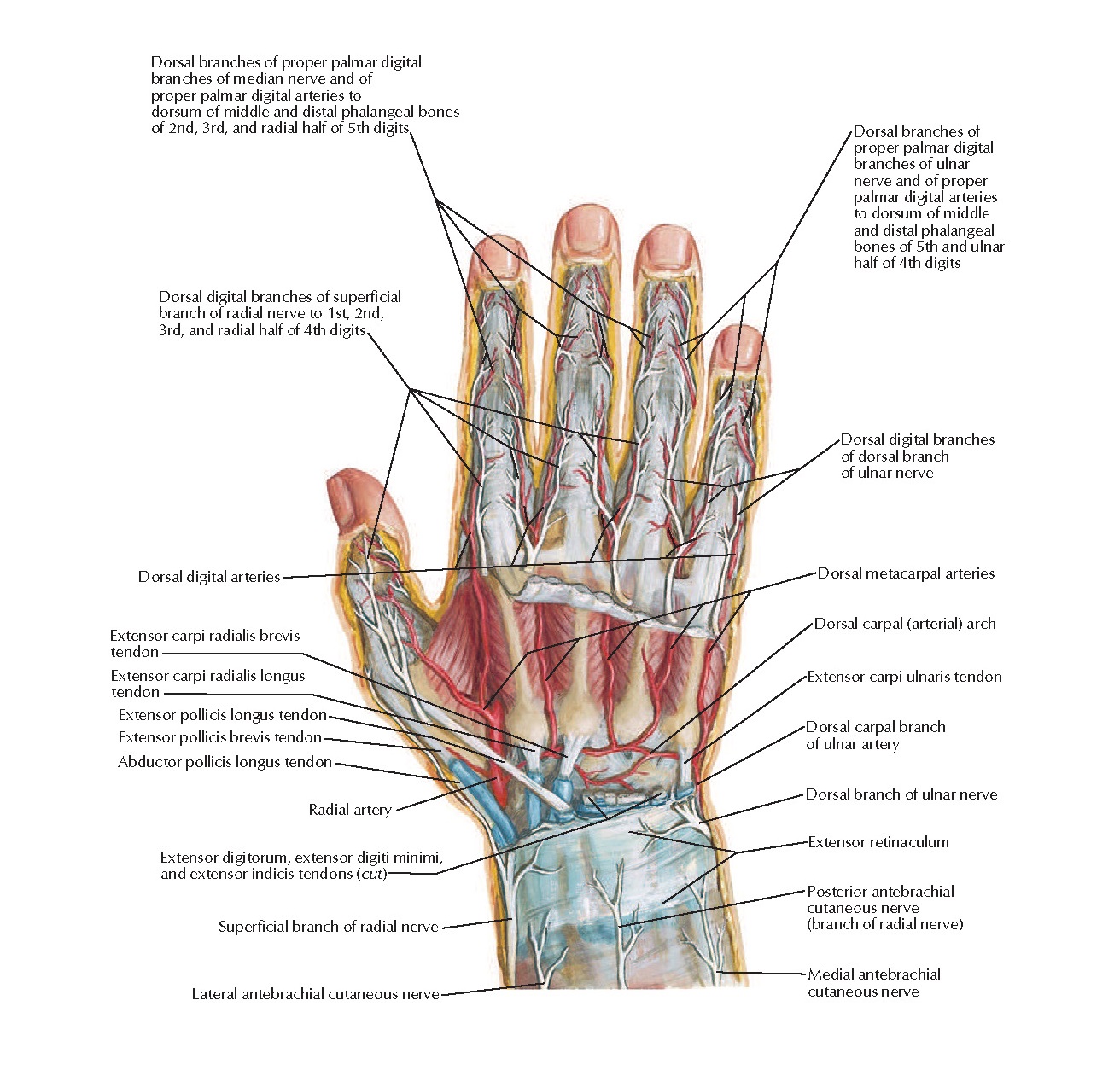 На культю руки крепится гильза, которая в каждом случае изготавливается врачом-протезистом под индивидуальные параметры. В гильзе размещаются датчики мышечной активности, взаимодействующие уже непосредственно с роботизированной рукой.
На культю руки крепится гильза, которая в каждом случае изготавливается врачом-протезистом под индивидуальные параметры. В гильзе размещаются датчики мышечной активности, взаимодействующие уже непосредственно с роботизированной рукой.
Фото: «Концерн Радиоэлектронные технологии»
Управление бионической рукой осуществляется через электроды с помощью биоэлектрических потенциалов мышц. Другими словами, протез «улавливает» мышечные импульсы и реагирует на них определенными движениями. Большинство задач решается двумя действиями протеза – хватом и щупом. Первое позволяет взаимодействовать с крупными предметами, второе – с мелкими, например застегнуть молнию или завязать шнурки.
Некоторые производители расширяют возможности бионических протезов, встраивая в них различные датчики и гаджеты, устройства оплаты, фонарики. Уже сегодня понятно, что в обозримом будущем возможности протезов превысят возможности природных органов тела, и это откроет совершенно новые перспективы их применения.
Кибер-руки Ростеха
В России наблюдается постепенный переход от косметического протезирования к функциональному, а рынок бионических протезов с каждым годом растет. По словам экспертов, в данный момент около 50 тыс. россиян стоят в очереди на протезирование рук. Сегодня благодаря участию госсектора молодые ученые и бизнесмены готовы вкладывать свои силы и знания в бионику. Невысокая цена – основное конкурентное преимущество отечественных разработок: базовые модели разрабатываются с учетом полного покрытия стоимости протеза субсидией Фонда социального страхования. Второй плюс для тех, кто выберет российский протез – более оперативная замена или ремонт в случае неполадок.
Перспективным направлением занимается сразу несколько предприятий Ростеха. Например, холдинг «Технодинамика» в следующем году начнет серийное производство бионических протезов руки под маркой A.R.M., выполненных полностью из отечественных компонентов. Протез создан совместно с командой изобретателей из Ленинградской области. Искусственная рука из металла и полиуретана воспроизводит основные движения кисти, не боится пыли и влаги и работает до трех дней без подзарядки. С помощью протеза можно поднимать до 10 кг и захватывать предметы диаметром до 10 см. Производить протезы A.R.M. будет НПП «Краснознаменец».
Холдинг «Швабе» уже выпускает высокотехнологичные протезы рук в сотрудничестве с резидентом «Сколково» – компанией «Моторика». Специалисты Вологодского оптико-механического завода собирают механическую часть протеза и внутренний остов кисти. Устройства «Моторики» отличаются чуткой системой управления, позволяющей работать с хрупкими предметами, различным дополнительным функционалом и длительным временем работы. Компания «Моторика» занимается просветительской деятельностью, помогает с получением протезов за счет государства и поддерживает сообщество владельцев бионики.
В рамках холдинга КРЭТ производство бионических протезов осваивает НПО «Квант». Предприятие готовится к выпуску протезов SmartLi, разработанных новгородской компанией «Техбионик». Важное преимущество разработки – модульная конструкция протезов. Она открывает широкие возможности для адаптации устройств под конкретных пациентов и снижает стоимость протеза. Проект предусматривает выпуск целой линейки протезов: от облегченных моделей для маленьких детей до многофункциональных искусственных кистей.
Кисть руки человека: анатомия и фото скелета, где находятся запястья и фаланги пальцев, сколько в кисти костей | Ревматолог
Руки человека менялись в ходе эволюции благодаря трудовой деятельности. Движения пальцев и моторика рук позволяют нам выполнять самые разнообразные, в том числе крайне сложные действия. Нарушения в одном из составляющих элементов руки может повлечь за собой физическую недееспособность.
В статье мы подробно рассмотрим строение кисти руки человека с названиями костей, мышечный, связочный аппарат, а также функции кисти.
Кости кисти руки
Анатомия кисти руки человека — объемный комплексный раздел, который включает в себя скелет и устройство отделов кисти. Кисть руки состоит из 27 мелких косточек, которые распределяют на себе остальные ткани — связки, мышцы и кожу, обеспечивают кисти гибкость.
Скелет кисти руки (на латыни manus) поделен на три отдела — запястье, пясть и фаланги пальцев. Подробно рассмотрим сколько костей в кисти и сколько фаланг на большом пальце.
Запястье
Рассмотрим, что такое запястье и где находится. Запястье — основа скелетной системы кисти, представляющая собой структуру из 8 сгруппированных косточек, объединенных между собой связками. Все косточки губчатые и обладают неправильной формой, состоят из трех отделов — основания, тела и головки.
Косточки запястья расположены в два ряда:
- Ладьевидная, полулунная, трехгранная соединены между собой неподвижным суставом и гороховидной косточкой — образуют проксимальный ряд костяшек пальцев кисти. Этот ряд обращен в сторону предплечья, объединяет лучевую кость с поверхностной частью лучезапястного сустава.
- Трапециевидная, многоугольная, крючковидная и головчатая — образуют второй ряд, дистально соединяются с пястью.
Кости запястья лежат в разных плоскостях — ладонная часть вогнута внутрь, напоминает лодочку. Тыльная сторона запястья образует выпуклую суставную поверхность. Дистальный ряд соединяется с проксимальным при помощи сустава неправильной формы.
Свободное костное пространство заполнено кровеносными сосудами, нервами, соединительной и хрящевой тканью. Косточки запястья практически не двигаются относительно друг друга. Вращение кистью обеспечивает сустав, расположенный между лучевой и запястной костями.
Фото запястья рук представлено ниже.
Пясть
Пясть – часть кисти между запястьем и пальцами руки, состоящая из 5 продолговатых трубчатых костей. Пясть включает в себя сесамовидные и пястные кости. Пястная косточка первого пальца массивная и короче остальных. Самая длинная — вторая пястная косточка. Остальные кости к краю кисти уменьшаются в длине.
Все пястные кости имеют основание — соединяется неподвижным суставом с запястьем, тело и головку полушаровидной формы, которая подвижными суставами соединяется с фалангами пальцев. Седловидную форму имеют первая и пятая пястные кости, остальные — плоские суставные поверхности.
Сесамовидные кости расположены в глубине сухожилий между проксимальной фалангой большого пальца и его пястной костью. Сесамовидные кости увеличивают плечо силы прикрепленных к ним мышц.
Будет интересно:
Как устроена рука человека
Как устроены мышцы плеча человека
Как устроен плечевой сустав у человека
Пальцы
Кисть человека включает в себя костяшки пальцев и ногтевые фаланги — состоящие из основы, проксимального и дистального конца, на котором расположена ногтевая бугристость.
Фаланги пальцев — небольшие удлиненные косточки, в средней своей части полуцилиндрической формы. Плоская часть направлена на сторону ладони, выпуклая — на тыльную сторону. Пальцы состоят из 3 фаланг — дистальная, проксимальная и средняя. Большой не имеет средней фаланги, состоит только из 2 фаланг. Дистальные фаланги пальцев рук самые маленькие, проксимальные — длинные.
Справка! На пальцах человека нет мышц. Сухожилия кисти соединяются с мышечными тканями, расположенными в ладонях и предплечьях, тянут и управляют пальцами, как марионетками.
Фаланги соединяются с помощью подвижных блоковидных суставов, которые осуществляют сгибание, разгибание и вращение пальцев. Все суставы кисти имеют прочные суставные капсулы. Сустав большого пальца седловидной формы обеспечивает только разгибание и сгибание.
Суставы и связки
Связочный аппарат скрепляет все косточки кисти вместе и представлен связками:
- межсуставными,
- коллатеральными,
- ладонными,
- тыльными.
Строение ладони и большого пальца устроено так, что связки и сухожилия ладонной стороны развиты сильнее, чем тыльные. Тыльные соединяют кости запястья между собой и с пястными костями, удерживают суставы в физиологической норме во время движения, защищают от травм, придают упругость, гибкость кисти руки.
Межкостные связки расположены между отдельными костями на латеральной, медиальной, тыльной и ладонной поверхностях запястья. Большее число связок прикреплено к головчатой кости. Боковая лучевая и локтевая, тыльная и ладонная лучезапястная, а также межзапястные связки удерживают лучезапястный сустав от чрезмерных движений.
Особая связка — удерживатель сгибателей, расположенная на лучевой и локтевой стороне ладонной поверхности, закрывает канал запястья, через который проходят сухожилия сгибателей пальцев, сосуды и срединный нерв.
Связки кисти руки расположены в разном направлении — дугообразно, поперечно и радиально, создают толстый фиброзный слой. Прочность и эластичность связкам обеспечивают плотные волокна соединительной ткани. При повышенном физическом усилии связки кисти могут подвергнуться растяжению, но разрывы происходят редко.
Читайте также:
Что входит в состав опорно-двигательной системы
Как устроена нога человека
Суставы кисти:
- Среднезапястный сустав — соединяет верхний и нижний ряды косточек запястья, формируя отдельную капсулу. Поверхность сустава имеет неправильную форму. Полулунная кость имеет важное значение оси в этой структуре — вокруг нее совершаются ограниченные движения, стабильность обеспечивают связки.
- Лучезапястный сустав — имеет форму эллипса, образован лучевой костью и мелкими косточками первого проксимального ряда запястья — трехгранной, полулунной и ладьевидной, которые со стороны запястья покрыты сплошной гиалиновой пластиной, образуя единую суставную поверхность. Сустав укреплен со всех сторон связками, обеспечивает круговое вращение, сгибание и разгибание кисти.
- Запястно-пястные суставы — соединяют дистальный ряд костей запястья с основаниями пястных костей, имеют плоскую форму. Малоподвижны из-за хорошо развитых связок. Сустав большого пальца имеет седловидную форму — образован основанием первой пястной и многоугольной костью, совершает отведение, приведение, противопоставление, круговое и обратное движение. Большой палец противопоставлен всем остальным, благодаря этому возрастает объем хватательных движений кисти.
- Пястно-фаланговые суставы — образованы головками пястных костей и основаниями фаланг пальцев, имеют шаровидную форму и три перпендикулярных друг другу оси вращения, вокруг которых выполняется разгибание и сгибание, отведение и приведение, а также круговые движения. Суставы укреплены коллатеральными связками, расположенными по бокам, и удерживают фаланги пальцев. Ладонные связки, переплетаясь с волокнами глубокой поперечной связки, препятствуют расхождению в разные стороны головок пястных костей.
- Межфаланговые суставы — шаровидной формы с разгибательной и сгибательной функцией, соединяют косточки пальцев между собой, помогая удерживать предметы. На четвертых пальцах руки по два сустава, большой палец имеет один межфаланговый сустав, противопоставлен остальным, служит для прижимания к ладони и надежного удержания предметов, головка фаланги имеет блоковидную форму, посередине — вогнутость, основание следующей фаланги имеет две неглубокие, покрытые гиалиновым хрящом поверхности с центральным гребнем посередине.
Боковые коллатеральные связки и добавочные на ладонной поверхности укрепляют пястно-фаланговые и межфаланговые суставы. Эти суставы обладают самым большим объемом движений, остальные дополняют общую амплитуду подвижности в кисти.
Мышцы
Мышечный аппарат кисти состоит из множества мелких мышц, которые крепятся к костям с помощью сухожилий и связок. Комплексная работа всех мышечных волокон обеспечивает точность и координацию движений пальцев. Травма одной из связок или мышц влечет за собой нарушение основных функций руки.
Мускулатура кисти включает три группы мышц:
- средняя — червеобразные мышцы, ладонные и тыльные межкостные мышцы. Участвуют в сгибании фаланг, приводят и разводят пальцы в стороны,
- мышцы большого пальца — образуют на кисти возвышение большого пальца. Различают: короткую мышцу, которая отводит большой палец, короткий сгибатель большого пальца, мышцу, противопоставляющую большой палец, и мышцу, приводящую большой палец,
- мышцы малого пальца — образует возвышение на внутренней стороне ладони. Короткая ладонная мышца, отводящая мизинец мышца, короткий сгибатель мизинца и мышца, противопоставляющая мизинец.
Сосуды и нервы
Кости, суставы, мышцы и связки рук обильно кровоснабжаются. Кровь насыщает ткани кисти кислородом, обеспечивает высокую подвижность, быструю регенерацию тканей.
Локтевая и лучевая артерии подходят с предплечья к кисти, затем спускаются через лучезапястный сустав на ладонь и тыльную сторону кисти, образуют глубокую и поверхностную дуги. На тыльной стороне вена расходится на четыре пястные артерии, а после каждая делится еще на две пальцевые артерии, которые проходят по пальцам к ногтям. Сети мелких капилляров снабжают кровью пальцы. Обильное разветвление сосудов защищают пальцы от обильной потери крови при повреждении руки.
Иннервация руки происходит благодаря локтевому, срединному и лучевому нервам, которые своим взаимным действием обеспечивают двигательные функции, тактильную и болевую чувствительность. Множество рецепторов нервов проходят через всю руку до подушечек пальцев, сокращают и расслабляют мышцы.
Справка! Нервные окончания на пальцах настолько чувствительны, что при порезе поверхностного слоя кожи листком бумаги, рецепторы резко реагируют на попадание воздуха и человек испытывает боль сильнее, чем от пореза ножом.
Повреждение срединного нерва затрудняет сгибание и разгибание кисти, а одновременная травма связок приводит к полной утрате двигательной функции. Сжатие или травма локтевого нерва приводит к утрате отведения и приведения пальцев, в особенности теряют чувствительность нижняя часть ладони и мизинец. Лучевой нерв в ответе за чувствительность тыльной стороны кисти и отведение большого пальца. При поврежденном лучевом нерве невозможно сжать ладонь в кулак и разжать руку.
Функции кисти
Интересно! Большое количество нервных окончаний расположены на кончиках пальцев, рецепторы обеспечивают тактильные, температурные и болевые ощущения. Люди с нарушением зрения тактильно и сенсорно воспринимают мир через пальцы.
Слаженная работа подвижных соединений костей кисти, связочный и мышечный аппарат, снабженные нервами и кровеносными сосудами позволяют человеку выполнять множество разных действий.
Основные функции:
- Захват и перемещение предметов. Основные виды захватов — шаровой, клочковой, плоскостной, цилиндрический, межпальцевый и щипковый.
- Жестикуляционная — участие в выражении эмоций. Человек использует жестикуляцию для эмоционального и точного объяснения своей точки зрения, жестами пользуются глухонемые люди для общения.
- Осязательная — познание окружающего мира. Тактильное осязание позволяет различать форму, размер, вес, консистенцию, температуру, расположение предметов.
Заключение
Мы рассмотрели строение и функции кисти руки и убедились в универсальности этой части скелета, играющей огромную роль в познании окружающего мира, позволяющей человеку совершать много различных точных механических действий.
Кисти — хрупкие части руки, которые необходимо беречь. В случае повреждения кисти, проявления болевого синдрома, потери чувствительности нужно обратиться к врачу и пройти диагностику. Своевременное обращение за помощью исключит воспалительные процессы, потерю трудоспособности.
Эволюция на кулаках | Наука и жизнь
Как показали исследования американских ученых, эволюция руки человека – лучшее доказательство его… агрессии.
При обсуждении эволюции человека, исследователи всегда рассматривают изменения строения кисти, сравнивая руку человека с лапой обезьяны. Очевидно, что руки позволяют совершать более тонкие и сложные движения, чем лапы обезьяны, используемые, в основном, для перемещения и работы с крупными предметами.
Наука и жизнь // Иллюстрации
Наука и жизнь // Иллюстрации
Наука и жизнь // Иллюстрации
‹
›
Важнейшим фактором для становления человеческого вида стала способность кисти сжиматься в кулак. Хотя еще у древних гоминид большой палец был противопоставлен остальным, он почти не использовался: важнее были длинные пальцы, помогавшие перемещаться с ветки на ветку. Но уже у Homo habilis строение кисти было близко к современному, и человек умелый изготавливал орудия труда и другие предметы, относящиеся к Олдувайской культуре. Между тем, наши ближайшие родственники – шимпанзе и бонобо – и сейчас не способны сжать свою кисть в кулак. Спустившись с дерева и распрямляясь, наш предок попал в новые условия жизни и вступил в борьбу за неё. Оказалось, что на земле важнее крепкие кулаки, а не удобные для лазания по деревьям лапы.
Специалисты из университета штата Юта (США) Дэвид Карриер и Майкл Морган решили выяснить, казалось бы, очевидную вещь: как эффективнее бить – кулаком или открытой ладонью? Для участия в эксперименте пригласили десять мужчин в возрасте от 22 до 55 лет, занимавшихся боксом и боевыми искусствами. Им было предложено ударить по боксёрской груше разными способами: сверху, снизу и сбоку, используя сжатый кулак или открытую ладонь.
С помощью датчиков, встроенных в боксерскую грушу, исследователи выяснили, что сила удара кулаком и открытой ладонью почти одинакова. Однако когда рука сжата в кулак, площадь соприкосновения с грушей меньше, и сила удара в расчете на единицу площади больше в 1,7 раза.
Во второй серии опытов ученые проверяли, как кулак защищает хрупкие кости кисти. Участники должны были медленно нажимать на специальное устройство сжатым кулаком, «полукулаком» без большого пальца и просто согнутыми пальцами, которые не касались ладони. Эксперимент показал, что при сжатии ладони в кулак риск получить травму значительно меньше. Таким образом, в ходе эволюции руки не только приобретали возможность совершать более сложные движения, но и становились важным средством защиты и нападения.
Интересно упомянуть и более раннюю гипотезу Карриера и Моргана: по их мнению, прямохождение было следствием того, что, стоя на двух ногах, драться удобнее. Может показаться, что ученые хотят показать человека изначально весьма агрессивным видом. Авторы исследования не отрицают этого, заявляя, что эволюция человека не происходила в тепличных условиях, и агрессия была естественна.
«Мне кажется, существует неприятие этой идеи больше среди ученых, нежели среди обывателей. Им не хочется соглашаться с тем, что на каком-то уровне мы по природе своей являемся агрессивными животными. Между тем, те, кто закрывает глаза на наши природные качества, оказывают нам медвежью услугу», – комментирует результаты своей работы профессор Карриер.
Результаты исследования опубликованы в Journal of Experimental Biology (Журнал экспериментальной биологии), doi: 10.1242/jeb.075713.
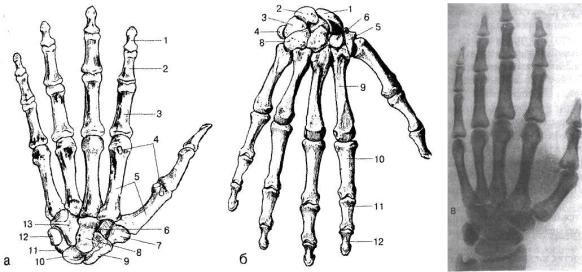
Иллюстрации: 1. Кулак – двигатель эволюции?
2. Сравнительная анатомия руки человека (справа) и шимпанзе (слева).
3. Рука шимпанзе, ¬на первый взгляд, очень похожа на человеческую.
Использование руки человека как бессильного источника инфракрасного излучения
Человеческая рука как источник инфракрасного света, при этом каждый палец излучает инфракрасный свет независимо. Предоставлено: Шун Ан.Группа исследователей из Шанхайского университета Цзяо Тонг обнаружила, что человеческая рука может использоваться как бессильный источник инфракрасного излучения (ИК) в самых разных областях применения. В своей статье, опубликованной в Proceedings of the National Academy of Sciences , группа отмечает, что человеческая рука естественным образом излучает ИК-излучение, и они демонстрируют, что это излучение можно улавливать и использовать.
Человеческое тело излучает свет в невидимом ИК-диапазоне, включая руки. Исследователи отметили, что этот источник излучения потенциально может быть обнаружен и использован в различных приложениях, от генерации сигналов до систем шифрования. Они также отметили, что, поскольку у руки несколько пальцев, ИК-излучение, которое она излучает, можно рассматривать как мультиплексированное.
ИК — это форма электромагнитного излучения — его длины волн длиннее, чем у видимого света, поэтому люди не могут их видеть.Предыдущие исследования показали, что человеческое тело испускает такое излучение из-за тепла тела. Электромагнитное излучение несет с собой лучистую энергию, и его поведение классифицируется как квантовая частица и волна. Предыдущие исследования также показали, что электромагнитное излучение можно использовать в различных приложениях, включая микроволны, радио и медицинские устройства визуализации. И инфракрасный свет, в частности, позволяет использовать очки ночного видения, приборы для спектроскопии и медицинские устройства, используемые для лечения ожогов.В этой новой работе исследователи обнаружили, что очень небольшое количество ИК-излучения, излучаемого рукой человека, достаточно для использования в различных устройствах.
Команда начала с создания устройства, которое могло отделить ИК-излучение, излучаемое рукой, от внешнего ИК-излучения. Затем они распылили материал с низкой отражающей способностью на алюминиевую основу и обнаружили, что вместе эти два устройства можно использовать для шифрования сообщений при температуре окружающей среды. Они отметили, что когда человеческая рука использовалась в качестве источника света для устройства, его ИК-излучение отражалось всеми областями, включая области с высоким ИК-излучением — более высокое увеличение ИК-излучения позволяло устройству различать ИК-излучение, обеспечивая средства для встраивания в процесс дешифрования.Исследователи предполагают, что их устройство доказывает, что ИК-излучение, генерируемое руками человека, достаточно для создания устройств на основе ИК-излучения. Они также отмечают, что их устройство можно модифицировать, чтобы можно было использовать пальцы в качестве ключей шифрования.
Графеновые « умные поверхности » теперь настраиваются для видимого спектра
Дополнительная информация: Shun An et al.Человеческая рука как бессильный и мультиплексированный источник инфракрасного света для дешифрования информации и генерации сложных сигналов, Труды Национальной академии наук (2021 г.). DOI: 10.1073 / pnas.2021077118
© 2021 Сеть Science X
Ссылка : Использование руки человека как бессильного источника инфракрасного излучения (2021 г., 8 апреля) получено 30 июля 2021 г. с https: // физ.org / news / 2021-04-human-powerless-infrared-source.html
Этот документ защищен авторским правом. За исключением честных сделок с целью частного изучения или исследования, никакие часть может быть воспроизведена без письменного разрешения. Контент предоставляется только в информационных целях.
Как ученые пытаются заменить человеческую руку · Границы для молодых умов
Абстрактные
У некоторых людей только одна рука или совсем нет рук.У них нет рук либо от рождения, либо из-за несчастных случаев или болезней. Протезы кисти — это искусственные приспособления, используемые для замены отсутствующих рук. «Пассивные» руки, то есть протезы рук, которые фактически не двигаются, выглядят реалистично, легкие, прочные и не слишком дорогие. Но, чтобы активно схватывать вещи, нужен «активный» протез. Это могут быть простые механические руки или сложные дорогие роботизированные руки. У всех видов протезов есть свои достоинства и недостатки, но текущие исследования сосредоточены в основном на активных электрических руках роботов.Одна большая, нерешенная проблема — как дать возможность пользователям протезирования чувствовать себя роботизированными руками. Было испробовано множество различных методов, некоторые из которых требуют хирургического вмешательства, но ученые все еще не могут полностью восстановить естественные ощущения.
Введение
Мы не случайно просим людей «помочь нам», когда нам нужна помощь. Наши руки имеют решающее значение для всего, от того, чтобы встать с постели до игры на пианино. Но есть люди, у которых одна рука или совсем нет рук. Некоторые люди рождаются без одной или обеих рук.Другие теряют руки в результате несчастных случаев, таких как автомобильные аварии, из-за болезней, таких как заражение крови, или во время войны. Часто все легко можно сделать одной рукой [1]. Люди могут использовать зубы, подбородок или ноги и ступни, чтобы держать предметы и перемещать их. Например, чтобы попытаться расстегнуть молнию куртки одной рукой, человек может удерживать воротник зубами. А для задач, которые сложно выполнить одной рукой, существуют полезные инструменты. Однако наличие двух рук упрощает многие задачи, например открытие двери, когда что-то несут.Кроме того, мы также используем руки, чтобы общаться с другими, жестикулируя и указывая [2].
Что такое протез кисти?
Протез — это искусственное устройство , которое имитирует функцию части тела. Более половины людей, у которых отсутствует одна или обе руки, хотя бы время от времени предпочитают носить протез [1]. Существует два широко разных типа: пассивные протезы, такие как косметические и пассивные механические руки, и активные протезы, такие как рук с телесным приводом и рук с внешним приводом [1, 3].
Что такое «пассивные» протезы?
Простейшие формы протезов рук, пассивные косметические протезы, уже использовались более 2000 лет назад в Древнем Египте (рис. 1A). Они служат эстетической цели, то есть предназначены в основном «для внешнего вида», а не для функциональной цели, и их называют «пассивными» протезами, потому что они не могут двигаться, чтобы активно что-то схватить. Пассивные косметические руки все еще используются сегодня, потому что они могут выглядеть очень реалистично, что важно для многих пользователей.Если бы наше общество больше мирилось с внешними телами, люди могли бы чувствовать себя более комфортно на публике без косметических протезов.
- Рисунок 1 — Эволюция протезов кисти.
- (A) Это древний деревянный протез руки из Египта. (B) Пальцы этой средневековой механической железной руки могли быть заблокированы, что позволяло рыцарю держать поводья своей лошади во время верховой езды. (C) Эта миоэлектрическая рука такая же маленькая и легкая, как обычная рука.Он может двигать большим и указательным пальцами по отдельности, а средний, безымянный и мизинец вместе. (A) BY-NC-SA Музеи и галереи Лидса; (B) CC Attribution 3.0 Unported, Generalandesarchiv Karlsruhe 498-1 Nr. 5110 Bild 1; (C) воспроизведено с разрешения Prensilia S.r.l.
У пассивной механической руки есть пальцы, которые можно двигать с помощью другой руки или окружающей среды. Это означает, что для удержания чего-либо можно использовать механическую руку.Первая пассивная механическая рука была разработана и использовалась немецким рыцарем Готфридом «Гётцем» фон Берлихингеном в шестнадцатом веке (рис. 1B).
Чем отличаются «активные» протезы?
Активные протезы позволяют пользователю захватывать предметы, используя определенные движения тела без помощи другой руки. Есть два типа активных протезов: с телесным питанием и с внешним питанием.
Протезы с приводом от тела, изобретенные в девятнадцатом веке, обычно крепятся к телу с помощью ремня безопасности.Кисти или крючки на конце открываются и закрываются движениями тела, например вытягиванием руки (рис. 2). Эти протезы изготавливаются из пластика, металла и ткани для ремней обвязки.
- Рис. 2. Большинство протезов с телесным питанием можно открыть, потянув за трос, аналогично тормозам на велосипеде.
- Вытягивая руку или сгибая плечи, тянет за тросик (синий), открывающий протез. Когда рука отводится назад и натяжение троса снимается, резинка или пружина автоматически закрывают протез.
Активные протезы с внешним питанием широко используются с 1960-х годов. Их называют «с внешним питанием», потому что им нужен внешний источник питания, аккумулятор. Эти типы протезов представляют собой сложные роботизированные руки и руки, которые иногда можно увидеть в фильмах или компьютерных играх (рис. 1C). Эти протезы сделаны из пластика, металла и многих электрических компонентов, таких как двигатели и микропроцессоры. Эти устройства также называются протезами « миоэлектрическими ».«Мио» происходит от греческого языка и означает мышцы. Когда мы двигаем мышцами, вокруг них генерируются небольшие электрические поля, которые можно измерить с помощью электродов. Поместив электрод на кожу над мышцей, мы можем измерить, движется ли мышца и насколько сильно она двигается. Измеренный электрический сигнал передается на протез по проводам. Эти «миоэлектрические» сигналы сообщают протезу, открываться он или закрываться и с какой скоростью двигаться (рис. 3).
- Рис. 3. Когда отсутствует только рука, мышцы предплечья используются для управления миоэлектрическими протезами.
- Представьте, что запястье сгибается в сторону, как правило, при открытии протеза. Представьте, что запястье сгибается к телу, а затем протез снова закрывается.
Ученые пытаются найти все более эффективные способы использования этих миоэлектрических сигналов для управления протезами, такие как облегчение контроля и обеспечение большего количества движений, чем просто открывание и закрывание, например, перемещение отдельных пальцев [2].
Самая недавняя разработка в протезировании верхних конечностей называется «остеоинтеграция» (от латинского «os», что означает кость).В этой процедуре протез не прикрепляется к гнезду, которое натягивается на культи, как это используется для других видов активных протезов. Вместо этого в кости руки имплантируются винты, и протез руки напрямую прикрепляется к кости с помощью этих винтов — аналогично нашим естественным рукам (см. 0: 14–1: 12 в [4]). Однако операция и последующее лечение очень требовательны к пациенту.
Какой протез самый лучший?
Какой протез выбрать, отчасти является личным предпочтением, а отчасти определяется суммой денег, которую пользователь должен потратить на протез [3].Протезы с телесным питанием дороже косметических протезов (Таблица 1). Миоэлектрические протезы рук стоят еще дороже, и без медицинской страховки немногие могут их себе позволить. Миоэлектрические протезы также тяжелее других типов, и их батареи необходимо заряжать ежедневно. Кроме того, миоэлектрический контроль требует здоровых мышц и некоторой тренировки, чтобы правильно ими управлять. Протезы с телесным приводом ограничивают диапазон движений руки и плеч из-за ремня безопасности, но они более прочные и позволяют поднимать и перемещать более тяжелые предметы.Косметические протезы не ограничивают диапазон движений, они легкие и обычно выглядят очень реалистично, но они не позволяют пользователю что-либо активно схватывать. Некоторые люди предпочитают использовать простые протезы, а не сложные роботизированные руки, которые легче ломаются и их сложно ремонтировать.
- Таблица 1 — Ориентировочная стоимость протезов рук в США. В разных странах цены могут сильно отличаться.
Современные миоэлектрические протезы могут перемещать пальцы руки в разные положения, что позволяет использовать разные способы захвата (см. 1: 28–1: 38 и 2: 22–2: 59 в [4]).Это может облегчить захват, и потребуется меньше «компенсирующих движений». Компенсирующие движения — это неестественные движения, которые необходимы, потому что протез не может двигаться как естественная рука или кисть [5]. Например, чтобы поднять что-то плоское со стороны стола, локоть человека, носящего простой протез, нужно приподнять в сторону, чтобы компенсировать недостающее вращение запястья. Современные миоэлектрические протезы имеют большие пальцы, которые можно сдвинуть, чтобы сомкнуться, поверх указательного пальца, чтобы удерживать что-то плоским, поэтому нет необходимости поднимать локоть.Недавние исследования показывают, что подвижное запястье еще более полезно для уменьшения компенсаторных движений [5].
Из-за этих различных плюсов и минусов многие люди используют два или более протезов [1].
Можете ли вы пощупать руку робота?
Один большой открытый вопрос — как себя чувствовать с протезами [2, 6]. Люди, использующие протезы с питанием от тела, могут чувствовать натяжение троса, перемещающего протез, поэтому они могут в некоторой степени оценить силу захвата. Миоэлектрические протезы могут быть оснащены датчиками для таких вещей, как регистрация силы захвата на кончиках пальцев, но ученые пока не знают, как передать информацию с датчиков обратно пользователю протеза.
Эта информация, называемая « обратная связь », должна быть предоставлена содержательным образом. Существует два разных подхода к обеспечению обратной связи: инвазивный и неинвазивный [6]. У обоих есть плюсы и минусы.
«Инвазивный» означает, что пользователю протеза требуется операция, чтобы получить такую обратную связь. Чаще всего исследователи вживляют электроды вокруг, в или через нерв культи, чтобы напрямую стимулировать нервную систему. Цель состоит в том, чтобы восстановить естественную обратную связь посредством прямой нервной стимуляции.В конце концов, естественные сенсоры в человеческой руке также отправляют информацию по тем же нервам в мозг. Но этот прием пока не дал результатов.
«Неинвазивная» обратная связь, напротив, не требует хирургического вмешательства. Обычными способами обеспечения неинвазивной обратной связи являются электрическая стимуляция кожи, вибрация на коже или устройства, которые толкают, тянут или сжимают кожу. Но обычно это не воспроизводит естественное ощущение. Например, ученые помещают на кожу вибрирующий двигатель; при прикосновении к протезу двигатель вибрирует, подобно тому, как это происходит, когда мобильный телефон получает сообщение.Мы называем это «сенсорной заменой», потому что один вид сенсорной информации (естественное осязание) заменяется («заменяется») другим (вибрацией). Эта замена не является чем-то естественным для мозга, поэтому ее необходимо изучить. Было бы идеально, если бы вместо этого мы могли воспроизводить естественные ощущения неинвазивным способом.
Заключение
В повседневной жизни протезы не являются строго обязательными, но многие люди предпочитают носить какой-либо протез.Все виды протезов в какой-то степени могут восстановить внешний вид двух рук. Активные протезы могут дополнительно восстановить некоторую способность касаться, захватывать и удерживать предметы. Миоэлектрические руки становятся все более ловкими и красивыми, но стоят они дорого. Чтобы восстановить ощущения с помощью этих роботизированных рук, нам нужно найти способ осмысленно отправлять информацию от датчиков пользователю. Многие исследователи работают над этой проблемой и добиваются огромных успехов, но до сих пор нет протеза руки, восстанавливающего естественные ощущения.
Глоссарий
Протез : ↑ Замена недостающей части тела.
Искусственный : ↑ Что-то сделанное людьми; не естественно.
Body-Powered : ↑ То, что движется человеческим телом.
Внешнее питание : ↑ То, что перемещается с помощью внешнего источника энергии, например, аккумулятор.
Myoelectric : ↑ Использование электрической энергии мышц («мио» по-гречески «мышца»).
Датчик : ↑ Устройство, которое реагирует на физический стимул (например, давление) и отправляет информацию о нем.
Обратная связь (специально для протезов) : ↑ Информация о протезе, возвращенная лицу, использующему протез.
Заявление о конфликте интересов
CC владеет акциями Prensilia Srl, компании, производящей роботизированные руки, показанные на Рисунке 1C.
Оставшийся автор заявляет, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Список литературы
[1] ↑ Остли, К., Лешо, И.М., Франклин, Р.Дж., Гарфельт, Б., Скьелдал, О.Х., и Магнус, П., 2012. Использование протезов у взрослых, получивших серьезные ампутанты верхней конечности: характер ношения , протезные навыки и фактическое использование протезов в повседневной жизни. Disabil. Rehabil. Ассистент. Technol. (2012) 7: 479–93. DOI: 10.3109 / 17483107.2011.653296
[2] ↑ Корделла, Ф., Чианчо, А. Л., Саккетти, Р., Davalli, A., Cutti, A.G., Guglielmelli, E., et al. 2016. Обзор литературы о потребностях пользователей протезами верхней конечности. Фронт. Neurosci. 10: 1–14. DOI: 10.3389 / fnins.2016.00209
[3] ↑ Кэри, С. Л., Лура, Д. Дж., И Хайсмит, М. Дж. 2015. Различия в миоэлектрических и телесных протезах верхних конечностей: систематический обзор литературы. J. Rehabil. Res. Dev. 52: 247–62. DOI: 10.1682 / JRRD.2014.08.0192
[4] ↑ DeTOP.2018. Официальное видео проекта DeTOP . YouTube.com. Доступно в Интернете по адресу: https://www.youtube.com/watch?v=6WQiJPexEDM (по состоянию на 6 апреля 2019 г.).
[5] ↑ Montagnani, F., Controzzi, M., and Cipriani, C. 2015. В современных протезах рук отсутствует ловкость пальцев или запястья? IEEE Trans. Neural Syst. Rehabil. Англ. 21: 1–10. DOI: 10.1109 / TNSRE.2015.2398112
[6] ↑ Скофилд, Дж. С., Эванс, К. Р., Кэри, Дж. П., и Хеберт, Дж. С. 2014. Применение сенсорной обратной связи в моторизованном протезе верхних конечностей: обзор. Expert Rev. Med. Dev. 13: 1–13. DOI: 10.1586 / 17434440.2014.929496
Техники управления руками человека с помощью электрических стимулов мышц — Rekimoto Lab
→ [Ссылка на японскую страницу, 日本語 の ペ ー ジ へ]
Эми Тамаки, Мияки Такаши и Дзюн Рекимото
|
Если устройство может управлять руками человека, оно может быть полезно для HCI и вывода реальных приложений.Чтобы помочь контролировать движение пальцев, мы представляем PossessedHand, устройство с ремнем для предплечья, которое может научить, когда и какими пальцами следует двигать. PosdedHand управляет пальцами пользователя, прикладывая электрический стимул к мышцам предплечья. Каждая мышца стимулируется с помощью 28 электродов. Мышцы на разной глубине предплечья могут быть выбраны для моделирования путем изменения уровня стимуляции. PosagedHand может автоматически откалибровать систему для отдельных лиц. Система автоматической калибровки оценивает взаимосвязь между каждой подушечкой электрода, уровнем стимуляции и движением мышц.Эксперименты показывают, что PostendedHand может управлять движением 16 суставов руки.
← Видео | |
Стимуляция предплечья пользователя
| |
Список литературы
|
Нравится:
Нравится Загрузка …
Новое устройство на запястье, дополняющее человеческую руку двумя роботизированными пальцами
Открутить отвертку, снять крышку с бутылки и очистить банан — это всего лишь несколько простых задач, которые сложно выполнить в одиночку. Теперь новый робот, устанавливаемый на запястье, может оказать помощь — точнее, пальцы.
Фэй Ву, аспирантка факультета машиностроения, демонстрирует устройство «сверхштатные роботизированные пальцы».Фото: Мелани Гоник
Исследователи из Массачусетского технологического института разработали робота, который улучшает хватательные движения человеческой руки. Устройство, которое носится на запястье, работает по сути как два дополнительных пальца, прилегающих к мизинцу и большому пальцу. Новый алгоритм управления позволяет ему двигаться синхронно с пальцами пользователя, чтобы захватывать предметы различной формы и размера. Надев робота, пользователь мог одной рукой, например, удерживать дно бутылки, откручивая ее крышку.
«Это полностью интуитивно понятный и естественный способ двигать пальцами робота», — говорит Гарри Асада, профессор инженерных наук Форд на факультете машиностроения Массачусетского технологического института.«Вам не нужно управлять роботом, просто двигайте пальцами естественным образом. Затем пальцы робота реагируют и помогают вашим пальцам ».
Фэй Ву, аспирантка факультета машиностроения, демонстрирует устройство «сверхштатные роботизированные пальцы». Фото: Мелани Гоник
В конечном счете, говорит Асада, после некоторого обучения люди могут начать воспринимать роботизированные пальцы как часть своего тела — «подобно инструменту, которым вы пользуетесь в течение долгого времени, вы чувствуете робота как продолжение своей руки.Он надеется, что двупалый робот может помочь людям с ограниченной подвижностью выполнять рутинные домашние дела, например открывать банки и поднимать тяжелые предметы. На этой неделе он и аспирантка Фэй Ву представили доклад о роботе на конференции «Робототехника: наука и системы» в Беркли, штат Калифорния.
Биомеханическая синергия
Робот, которого исследователи назвали «лишними роботизированными пальцами», состоит из исполнительных механизмов, соединенных вместе для приложения сил, равных силам человеческих пальцев, во время захвата.
Чтобы разработать алгоритм координации пальцев рук робота и руки человека, исследователи сначала обратились к физиологии жестов рук, выяснив, что пять пальцев руки очень хорошо скоординированы. Хотя рука может протянуть руку и схватить апельсин иначе, чем, скажем, кружку, для захвата предметов используются только два основных способа движения: соединение пальцев и их скручивание внутрь. Захват любого объекта можно объяснить комбинацией этих двух паттернов.
Исследователи выдвинули гипотезу, что подобная «биомеханическая синергия» может существовать не только между пятью человеческими пальцами, но и между семью. Чтобы проверить гипотезу, Ву надела перчатку с несколькими датчиками записи положения, прикрепленную к ее запястью с помощью легкой скобки. Затем она обыскала лабораторию в поисках обычных предметов, таких как коробка печенья, бутылка содовой и футбольный мяч.
Ву схватила каждый объект рукой, а затем вручную разместила пальцы робота, чтобы удерживать объект.Она несколько раз записывала углы суставов рук и роботов с различными объектами, затем проанализировала данные и обнаружила, что каждый захват можно объяснить комбинацией двух или трех общих паттернов на всех семи пальцах.
Исследователи использовали эту информацию для разработки алгоритма управления, чтобы сопоставить позы двух пальцев робота и пяти пальцев человека. Асада объясняет, что алгоритм по существу «учит» робота принимать определенную позу, которую человек ожидает от робота.
Приближаем роботов к человеку
На данный момент робот имитирует хватание руки, сжимаясь и раздвигаясь в ответ на пальцы человека. Но Ву хотел бы продвинуть робота еще на один шаг, управляя не только положением, но и силой.
«Сейчас мы изучаем позу, но это еще не все», — говорит Ву. «Есть и другие вещи, за которые можно хорошо и стабильно ухватиться. С объектом, который выглядит маленьким, но тяжелым или скользким, поза будет такой же, но сила будет другой, так как же он к этому приспособится? Это следующее, на что мы посмотрим.”
Ву также отмечает, что некоторые жесты, такие как хватание яблока, могут немного отличаться от человека к человеку, и, в конечном итоге, роботизированный помощник может учитывать личные предпочтения захвата. С этой целью она планирует разработать библиотеку корреляций жестов человека и робота. Когда пользователь работает с роботом, он может научиться адаптироваться в соответствии со своими предпочтениями, исключая других из библиотеки. Она сравнивает это машинное обучение с системами голосового управления, такими как Apple Siri.
«Через какое-то время он привыкает к вашему произношению и настраивается на ваш акцент», — говорит Ву. «В долгосрочной перспективе наша технология может быть похожей, когда робот может настраиваться и адаптироваться к вам».
«Это открывает новые горизонты в вопросе о том, как взаимодействуют люди и роботы», — говорит Мэтью Мейсон, директор Института робототехники Университета Карнеги-Меллона, который не принимал участия в исследовании. «Это новое видение, которое дополняет множество способов, которыми робототехника может изменить наше восприятие самих себя.”
Асада говорит, что робот может быть уменьшен до менее громоздкой формы.
«Это прототип, но мы можем уменьшить его до одной трети и сделать складным», — говорит Асада. «Мы могли бы превратить это в часы или браслет, где пальцы выскакивают, а когда работа сделана, они возвращаются в часы. Носимые роботы — это способ приблизить робота к нашей повседневной жизни ».
Источник: Массачусетский технологический институт, автор: Дженнифер Чу
Создание роботов, имитирующих человеческую руку
В рамках национального исследовательского проекта по разработке недорогих искусственных рук Пентагон опубликовал видеоролик о роботе, который может почти заменить шину.
На видео двурукий робот с помощью инструмента снимает шину с автомобиля.
«Мы почти подошли к той стадии, когда мы можем снова надеть гайки на болты», — сказал Гилл Пратт, руководитель программы Агентства перспективных исследовательских проектов Пентагона (DARPA).
Целью программы, которая сейчас находится на третьем этапе, является разработка роботов и протезных устройств для широкого использования. До сих пор высокая стоимость, а также ограничения на ловкость и машинное зрение были основными препятствиями для передовых роботизированных систем.
Роботизированные руки, имитирующие возможности человеческой руки, стоят 10 000 долларов и более, а системы компьютерного зрения работают только в сильно структурированной среде с очень ограниченным набором объектов.
Но становится возможным изготавливать руки стоимостью менее 3000 долларов в количестве 1000 штук. Две команды — из iRobot, производителя роботов из Бедфорда, штат Массачусетс, и государственной Сандийской национальной лаборатории в Нью-Мексико — работают над ручным проектом; они используют множество широко доступных технологий, таких как камеры и датчики мобильных телефонов, чтобы снизить затраты.
«Мы определенно следим за их прогрессом», — сказал Родни Брукс, основатель Rethink Robotics, производителя недорогих промышленных робототехнических систем из Бостона.
Исследования Darpa были жизненно важны для сохранения США в авангарде робототехнических технологий, сказал он. Он сравнил текущую работу с проектами Darpa в 1980-х и 1990-х годах, которые привели к созданию роботизированных навигационных технологий, имеющих решающее значение для разработки беспилотных автомобилей.
Одна из разрабатываемых рук оснащена тремя пальцами, а другая — четырьмя, и они могут выполнять множество деликатных операций.В одном из видеороликов Darpa рука робота берет пинцет и использует его, чтобы подбирать соломинку и перемещать ее взад и вперед, сказал доктор Пратт.
«Различные руки все еще находятся в стадии разработки», — отметил он. Видео о замене шин было снято, когда «мы использовали старые руки, а не новые, и у них не хватило ловкости, чтобы навинтить гайку на болт так, чтобы она не пересекала резьбу».
Darpa также определила задачи, которые она надеется выполнить на следующем этапе. Одним из примеров является разработка руки и руки робота, которые могут искать самодельное взрывное устройство или I.E.D., на ощупь. Задача состояла в том, чтобы запрограммировать руку, которая могла бы расстегнуть молнию на спортивной сумке, а затем пройтись по сумке и распознавать предметы на ощупь.
Агентство также финансирует исследовательские группы по двум другим категориям. Компания выбрала Национальный центр робототехники в Университете Карнеги-Меллона, Лабораторию реактивного движения НАСА и Университет Южной Калифорнии для продолжения разработки программного обеспечения высокого уровня для следующего поколения роботов-манипуляторов.
До недавнего времени агентство просило разработчиков программного обеспечения разработать роботизированные программы для общих индивидуальных движений, таких как движение вперед или назад; теперь он просто хочет, чтобы роботы выполняли определенную задачу.
«Вы могли бы сказать такие вещи, как взять бутылку, открыть дверь и тому подобное», — сказал доктор Пратт. Агентство начинало с шести команд и провело «запекание», в ходе которого было выбрано три команды для продолжения на последнем этапе проекта.
В проекте программного обеспечения Darpa предоставила каждой команде стандартную руку, которую она затем запрограммировала.
«Задания по захвату были выполнены настолько хорошо, что мы считаем, что для того, что мы заставляли их брать, — от шара до камня и инструментов, таких как молотки, — нам не нужно выполнять дальнейшую работу по захвату», Доктор- сказал Пратт.
По его словам, манипулирование захваченными объектами — более сложная задача, и команды будут продолжать исследования. Программа финансируется еще на 18 месяцев.
Darpa также продолжает финансировать разработку недорогого оружия в Barrett Technologies, исследовательской фирме по робототехнике в Кембридже, штат Массачусетс; Сандия; я робот; и SRI International, исследовательской организацией в Менло-Парке, Калифорния,
. Агентство также планирует создать совместный проект по передаче некоторых достижений в области недорогих технологий, достигнутых в рамках проекта, в соответствующие усилия по разработке протезов конечностей для раненые солдаты.
Университет Джона Хопкинса получил средства на разработку нейронного интерфейса — прямой связи от руки робота к мозгу человека — и DEKA Research, независимая лаборатория разработки, возглавляемая Дином Каменом из Манчестера, штат Нью-Хэмпшир, теперь разработала отдельную носимую руку. рассматривается для утверждения Управлением по санитарному надзору за качеством пищевых продуктов и медикаментов.
Эта роботизированная рука близка к коммерциализации, сказал Джеффри Линг, исполняющий обязанности заместителя директора Управления оборонных наук Darpa.
«У нас есть фотографии молодых людей, занимающихся скалолазанием, и одного из пациентов, использующих палочки для еды, что действительно необычно», — сказал он.«Он обеспечивает высокую степень функциональности, и пациенты, у которых он есть, пользуются им».
Flex and Extend: моделирование руки человека
Шана МакАлександр
Разработчик продукта
Проведите учащихся в увлекательном и творческом проекте, в ходе которого они построят модель, демонстрирующую изгибающееся действие человеческой руки. Учащиеся используют материалы для поделок и следуют приведенной ниже процедуре, чтобы собрать модель руки. По мере того, как учащиеся узнают о сухожилиях и мышцах своих рук, они готовятся к обсуждению сходств и различий между биологической рукой и их моделью.Студенты могут проводить это задание индивидуально или в парах. Для выполнения упражнения требуется около 1 часа классного времени.
Соответствие научным стандартам нового поколения
- Наука и инженерная практика
- Разработка и использование моделей
- Построение пояснений и проектные решения
- Пересекающиеся концепции
- Причина и следствие
- Системы и модели систем
- Устройство и функции
Фон
Опорно-двигательный аппарат
Люди — большие и сложные организмы, которым для поддержки и передвижения требуются мышечные и скелетные системы.Скелетная мышца — особый тип ткани, прикрепленная к костям скелета, и сокращение этой мышечной ткани позволяет костям двигаться. Скелетные мышцы находятся под произвольным контролем соматической нервной системы, что означает сознательный контроль над сокращением и расслаблением мышц.
Место соединения двух костей называется суставом. Кости соединены в суставах тканью, называемой связками. Другой тип соединительной ткани, сухожилия, служит для связи скелетных мышц с костями через сустав.Мышцы необходимы для движения костей. Точка прикрепления мышцы кнутри (около средней линии тела) называется началом. Точка прикрепления мышцы дистально (дальше от средней линии тела), как правило, на более подвижной кости, называется прикреплением.
Когда скелетные мышцы сокращаются, точка прикрепления смещается к неподвижному началу, заставляя кости двигаться в суставе. Важно помнить, что мышцы действуют, проявляя тянущую силу, а не толкающую силу.Сокращенные мышцы короче и толще, чем в расслабленном состоянии. Мышцы работают как антагонистические пары; когда одна мышца сокращается, другая расслабляется.
Кости кисти и запястья
Человеческая рука состоит из запястья, ладони и 5 пальцев. Запястье состоит из 8 плотно расположенных костей, называемых запястьями. Медиально запястные кости соединяются с костями предплечья, лучевой и локтевой. Дистально запястные кости связаны с пястными костями и мышцами кисти.Кости ладони составляют пять пястных костей, каждая из которых находится на одной линии с одним пальцем. Пястная кость, которая соединяется с большим пальцем, имеет самый широкий диапазон движений, что позволяет ей противостоять другим пальцам. Фаланги — это кости, из которых состоят пальцы. Их по 3 на каждом пальце и 2 на большом. Стык каждой кости пальца виден как сустав.
Мышцы кисти и запястья
Есть много мышц, отвечающих за движение запястья, кисти и пальцев.Они берут начало от плечевой, лучевой и локтевой костей. Мышцы можно разделить на 2 группы: сгибатели и разгибатели. Сгибатели кисти и запястья находятся на передней стороне предплечья; разгибатели на задней стороне. Мышцы-сгибатели укорачиваются (сгибаются), заставляя пальцы смыкаться или подтягивая ладонь к запястью. Разгибатели укорачиваются (сгибаются), заставляя пальцы разжиматься или отводить ладонь от запястья.
Материалы (на ученика или пару)
- Картон, картон или пенопласт, 8½ x 5½ «
- 5 соломок или трубок
- Маркер
- Строка, 5 футов
- 5 бусинок
- Ножницы
- Ремесленный нож
- Рулон ленты (прозрачный или электрический)
- Метрическая линейка
Препарат
- Соберите все материалы.
- Обсудите с классом все относящиеся к делу вопросы безопасности. Ознакомьтесь с безопасными методами обращения с ножами и ножницами.
- Просмотрите предоставленную справочную информацию и поделитесь соответствующей информацией со своим классом.
Процедура
- Обведите руку и запястье на картоне, картоне или пенопласте, чтобы создать шаблон руки.
- Отметьте суставы руки и запястья на шаблоне. Проведите линии, представляющие суставы суставов и складку на подушечке большого пальца, которая образуется при прикосновении большого пальца и мизинца (см. Рисунок 1).
Рис. 1 Обведенные руки с отмеченными суставами. - Используйте нож для рукоделия, чтобы надрезать складку на большом пальце. Это позволит большому пальцу немного сдвинуться с места.
- Для каждого пальца отмерьте и отрежьте соломинку или трубку, простирающуюся от кончика пальца до запястья (см. Рисунок 2).
Рис. 2 Соломинки проходят от кончика большого пальца и каждого пальца до запястья. - Прикрепите соломинки к шаблону для руки вдоль каждого пальца и вниз от большого пальца к запястью; соломинка должна располагаться по центру пальца.Избегайте приклеивания лент на отмеченных линиях стыков. Концы трубочки должны встретиться на запястье.
- Обрежьте неровные концы соломинки на пальцах так, чтобы они совпадали с запястьями. Соломинка для большого пальца может располагаться поверх других под углом.
- На каждой отмеченной линии стыка прорежьте небольшую выемку в соломе с помощью ножа и удалите кусок соломки (см. Рисунок 3). Будьте осторожны, чтобы не разрезать соломинку полностью.
Рис. 3 Небольшая выемка на соломе на каждой отмеченной линии стыка. - Отрежьте пять 30-сантиметровых отрезков бечевки.
- Завяжите 1 кусок бечевки в петлю, продев ее через кончик пальца и второй сустав.
- Проденьте оставшуюся часть веревки через соломинку так, чтобы лишняя веревка оставалась свободной на запястье (см. Рисунок 4).
- Повторите шаги 9 и 10 для каждого пальца и большого пальца.
Рис. 4 Нить, продетая через кончик большого пальца, каждый палец и второй сустав.
Оставшуюся длину струны продеть через соломинку так, чтобы лишняя часть оставалась свободной на запястье. - Привяжите бусинку к концу каждой нити примерно в 5 см от запястья. Каждая бусинка служит ручкой для сгибания пальца (см. Рисунок 5).
Рис. 5 Бусинка привязана к концу каждой нити примерно в 5 см от запястья. - Надрезайте суставы на тыльной стороне кисти (см. Рисунок 6).
Рис. 6. Костяшки пальцев на тыльной стороне кисти. - Согните суставы каждого пальца и большого пальца так, чтобы картон изгибался.
- Потяните за бусинки, чтобы согнуть и разогнуть пальцы и большой палец.
- Очистите рабочее место и убедитесь, что острые предметы размещены в надежном месте.
Обсуждение
Вовлеките учащихся в разговор о мышцах и сухожилиях.Чем эта модель похожа на человеческую руку и каковы ее ограничения в качестве модели? Студенты должны понимать, что на картоне изображены кости кисти и запястья. Нити похожи на сухожилия, соединяющие кости с мышцами. Сгибание мускулов представлено натягиванием струн. На модели не показаны мышцы-разгибатели или сухожилия-разгибатели. Пальцы возвращаются в положение, когда мышцы-сгибатели расслаблены (струны отпускаются), но в человеческой руке антагонистическая мышца вернет пальцы в нейтральное положение.Вы можете попросить учащихся обсудить или расширить упражнение для создания сухожилий и мышц разгибателей, которые будут добавлены к их модели.
Новое устройство, напоминающее перчатки, имитирует осязание
Что, если бы вы могли прикоснуться к любимому человеку во время видеозвонка — особенно в сегодняшнюю эпоху социального дистанцирования COVID-19 — или взять в руки виртуальный инструмент в видеоигре?
Ожидаемые пользовательские испытания и финансирование для коммерциализации новой технологии, эти идеи могут стать реальностью через пару лет после того, как инженеры UNSW Sydney разработали новое тактильное устройство, воссоздающее осязание.
ТехнологияHaptic имитирует прикосновение, стимулируя локальные участки кожи способами, аналогичными тому, что ощущается в реальном мире, посредством силы, вибрации или движения.
Доктор Тхань Нхо До, преподаватель науки и директор лаборатории медицинской робототехники UNSW, является старшим автором исследования, посвященного новому устройству.
В его исследовательскую группу вошли ведущий автор и кандидат наук Май Тхань Тай, Фуок Тхиен Фан, Чунг Тхиен Хоанг и соавтор профессор науки Найджел Ловелл, руководитель Высшей школы биомедицинской инженерии.
Доктор До сказал, что осязание было чем-то, что многие люди считали само собой разумеющимся при выполнении повседневных задач.
«Когда мы делаем что-то руками, например держим мобильный телефон или набираем текст на клавиатуре, все эти действия невозможны без тактильных ощущений», — сказал он.
«Человеческая рука имеет высокую плотность тактильных рецепторов и является одновременно интересной и сложной областью для кодирования информации с помощью тактильной стимуляции, потому что мы используем руки, чтобы воспринимать большинство объектов каждый день.
«Есть много ситуаций, когда осязание было бы полезно, но невозможно: например, на консультации по телемедицине врач не может физически осмотреть пациента. Итак, мы стремились решить эту проблему ».
Исследование UNSW о новом тактильном устройстве было недавно опубликовано в журнале Института инженеров по электротехнике и радиоэлектронике (IEEE) Access .
Исследователи UNSW Engineering разработали новое устройство для растягивания мягкой кожи (SSD), которое можно интегрировать в ткань, такое как изображенная перчатка для пальца, которая контрастирует со стилизованной рукой робота.Изображение: UNSW Engineering
Доктор До сказал, что исследователи были так взволнованы своей новой тактильной технологией, что применили ее, чтобы запатентовать ее.
«Наше трехстороннее устройство для растягивания кожи (SSD), встроенное в кончики пальцев носимой тактильной перчатки, которую мы также создали, похоже на ношение второй кожи — она мягкая, растяжимая и имитирует осязание — и позволит создавать новые формы осязательной коммуникации для улучшения повседневной деятельности », — сказал он.
«Особенностью нашей новой технологии является то, что она масштабируема и может быть интегрирована в текстиль для использования в различных потенциальных приложениях, таких как телездравоохранение, медицинские устройства, хирургические роботы и обучение, дополненная и виртуальная реальность, дистанционное управление и промышленные установки.
«Устройство предназначено для решения общей проблемы в новых системах, таких как вспомогательные устройства, удаленная хирургия, беспилотные автомобили и управление движениями человека, — где визуальная или слуховая обратная связь может быть медленной, неинтуитивной и увеличивать когнитивную нагрузку».
Зачем нужно улучшать тактильные технологииВедущий автор исследования Май Тхань Тай сказал, что существующим технологиям было очень трудно воссоздать ощущение прикосновения к объектам в виртуальной среде или удаленно.
«Визуальные или слуховые сигналы легко воспроизвести, но тактильные сигналы воспроизвести сложнее. В виртуальной среде мы можем видеть объекты, но не можем чувствовать их, как если бы мы напрямую касались их », — сказал г-н Тай.
«Практически невозможно дать пользователю возможность почувствовать что-то происходящее на компьютере или смартфоне с помощью тактильного интерфейса, такого как коммерчески доступные умные очки.
«Вибрация — это самая распространенная на сегодняшний день тактильная технология, которая встроена во многие электронные устройства, такие как Taptic Engine, прикрепленный к задней части трекпада в ноутбуках, который имитирует нажатие кнопки.
«Но тактильная обратная связь с вибрацией становится менее чувствительной при непрерывном использовании или когда пользователи находятся в движении, что приводит к десенсибилизации и нарушению функциональности устройства».
На этой диаграмме показано, как работает новое устройство для растягивания мягкой кожи (SSD), разработанное исследователями UNSW Engineering. Изображение: UNSW Engineering
Как работает новое тактильное устройствоДоктор До сказал, что новая технология исследователей решила проблемы с существующими тактильными устройствами, представив новый метод воссоздания эффективного тактильного ощущения с помощью мягких миниатюрных искусственных «мускулов».
«Наша мягкая, пригодная для носки тактильная перчатка позволяет людям ощущать виртуальные или удаленные объекты более реалистично и захватывающе. Встроенные мягкие искусственные мышцы создают достаточные нормальные и поперечные силы для кончиков пальцев пользователя с помощью мягкого сенсора, что позволяет им эффективно воспроизводить осязание », — сказал он.
«Это работает так: представьте, что вы в Австралии, а ваш друг — в Соединенных Штатах. Вы носите тактильную перчатку с нашими интегрированными трехсторонними твердотельными накопителями на кончиках пальцев, а ваш друг также носит перчатку со встроенными 3D-датчиками силы.
«Если ваш друг поднимает предмет, он физически прижимается к пальцам вашего друга, и его перчатка с трехмерными датчиками силы будет измерять эти взаимодействия.
«Если эти трехмерные сигналы силы будут отправлены на вашу тактильную перчатку, то интегрированные трехсторонние направленные твердотельные накопители будут генерировать эти точные трехмерные силы на кончиках ваших пальцев, позволяя вам испытать то же чувство осязания, что и ваш друг».
Влияние новой технологииДоктор До сказал, что способность эффективно воспроизводить осязание с помощью нового носимого тактильного устройства будет иметь широкий спектр преимуществ; например, во время сегодняшней пандемии COVID-19, когда люди полагались на видеозвонки, чтобы оставаться на связи с близкими.
«В отличие от существующих тактильных устройств, наша технология мягкая, легкая и тонкая, и поэтому мы надеемся, что пользователи смогут интегрировать ее в то, что они носят, чтобы обеспечить реалистичные тактильные ощущения в условиях, включая реабилитацию, образование, обучение и отдых, » он сказал.
«Наша технология может позволить пользователю чувствовать объекты внутри виртуального мира или на расстоянии; например, ученый может почувствовать виртуальный камень с другой планеты, не выходя из лаборатории, или хирург может ощупать ткани органа пациента хирургическими инструментами, не касаясь их напрямую.”
Доктор До оценил, что новая технология может стать доступной в течение следующих 18 месяцев или трех лет — если планы по коммерциализации устройства будут реализованы.
«Следующим шагом будет проведение пользовательских оценок для проверки эффективности нашего устройства, потому что основная сфера наших текущих исследований — это дизайн, изготовление и характеристика новой технологии», — сказал он.
«Кроме того, мы планируем реализовать устройство в различных тактильных приложениях, таких как тактильное управление движением, навигационная помощь для пожилых людей и людей с плохим зрением, тактильный текстовый язык и 3D-дисплей с силовой обратной связью для использования в хирургических роботах, протезах и виртуальных устройствах. и дополненная реальность.”
Найдите исследовательский документ в IEEE Access. Изображения и видео доступны через Dropbox.
.