Перспектива н: ООО «Перспектива-Н» Чебоксары (ИНН 2124042840)
Перспектива Н официальный сайт автосалона
Автосалон Перспектива Н оказывает полный спектр услуг в сфере купли-продажи автомобилей. Приобрести транспорт в нем можно на особенно выгодных условиях.В настоящее время Перспектива Н – официальный дилер Лада в Новокуйбышевске. Здесь можно приобрести как новую модель обозначенной марки, так и авто с пробегом. Возможно совершение покупки в кредит, в рассрочку и по системе трейд ин.
Официальный сайт автосалона Перспектива Н
На официальном сайте компании имеется информация об автоцентре: адреса, контакты, фото. Там же все желающие имеют возможность изучить отзывы уже состоявшихся клиентов сервиса.
Все представленные в автомобильном салоне машины в полной мере адаптированы к российским условиям эксплуатации с помощью новейших технологий. Новые авто здесь можно выгодно купить по акции, которые проводятся производителем Ford в регулярном порядке.
Автосалон Лада: Перспектива Н
Автомобильный салон в Новокуйбышевске имеет собственные сервисный центр и шиномонтаж.
Здесь много автомобилей в наличии, так что если вы заинтересованы в том, чтобы купить авто на выгодных условиях, обратиться к этому официальному дилеру за помощью окажется оптимальным решением. Сотрудники автосервиса не только оформят все документы на продажу транспортного средства, но и помогут произвести его страхование.
LADA Kalina универсал
| Модель | Цвет | Трансмиссия | Цена |
|---|---|---|---|
| LADA XRAY | Белый | MT | 688850 |
| LADA Kalina универсал | Красный | MT | 523480 |
| LADA Vesta | Синий лёд | AT | 868250 |
| LADA Priora | Золотистый | AT | 458850 |
| LADA Largus | Серебро | MT | 713000 |
| LADA Granta | Синий | AT | 477135 |
Перспектива Н: автомобили с пробегом
Если вам нужно авто с пробегом в наличии, в автосалоне всегда имеются интересные модели б/у, цены на которые ниже, чем у большинства других продавцов.
[showyamap placemark=twirl#shopIcon zoom=16][placemark header=»Перспектива Н» address=»Новокуйбышевск, «][/showyamap]
Отзывы о Перспектива Н
Другие автосалоны в Новокуйбышевске| ОГРН | 1162130065569 |
| ИНН | 2124042840 |
| КПП | 213001001 |
| Организационно-правовая форма (ОПФ) | Общества с ограниченной ответственностью |
| Полное наименование юридического лица | ОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «ПЕРСПЕКТИВА-Н» |
| Сокращенное наименование юридического лица | ООО «ПЕРСПЕКТИВА-Н» |
| Регион | чувашия Чувашская Республика — |
| Юридический адрес | 428000, чувашия Чувашская Республика -, город Чебоксары, Московский проспект, дом 52, литер А, офис 103 |
| Регистратор | |
| Наименование | Инспекция Федеральной налоговой службы по г. Чебоксары, №2130 Чебоксары, №2130 |
| Адрес | 428022, Чебоксары г, Патриса Лумумбы ул, д 8 |
| Дата регистрации | 27.09.2016 |
| Дата присвоения ОГРН | 27.09.2016 |
| Учёт в ФНС | |
| Дата постановки на учёт | 30.12.2016 |
| Налоговый орган | Инспекция Федеральной налоговой службы по г.Чебоксары, №2130 |
| Сведения о регистрации в ПФР | |
| Регистрационный номер | 015023101618 |
| Дата регистрации | 09.01.2017 |
| Наименование территориального органа | Управление Пенсионного фонда Российской Федерации по г.Чебоксары Чувашской Республики, №015023 |
| Сведения о регистрации в ФСС | |
| Регистрационный номер | 212405993421001 |
| Дата регистрации | 28.09.2016 |
| Наименование исполнительного органа | Государственное учреждение — региональное отделение Фонда социального страхования Российской Федерации по Чувашской Республике, №2100 |
Перспектива Н — автосалон, 1 отзыв — Новокуйбышевск, улица Кирова, 8
Современный автосалон г. Новокуйбышевск, официальный дилер LADA и Lifan, расположен в оживленной части города Новокуйбышевск, по адресу ул. Кирова 8.
Новокуйбышевск, официальный дилер LADA и Lifan, расположен в оживленной части города Новокуйбышевск, по адресу ул. Кирова 8.Основные направления деятельности нашей компании включают в себя продажу автомобилей LADA и Lifan, гарантийное и послегарантийное обслуживание автомобилей, кузовные и покрасочные работы, продажу и заказ запасных частей и аксессуаров.
К вашим услугам полный модельный ряд автомобилей марки LADA и Lifan, высокий уровень обслуживания, индивидуальный подход к каждому клиенту.
В цехе кузовных и покрасочных работ производится ремонт автомобилей любой степени сложности с применением современных технологий и оборудования.
Наша работа проходит под девизом:
«Клиент однажды — друг навсегда!».
Комплекс услуг автосалона г. Новокуйбышевск:
гарантийное и после гарантийное техническое обслуживание;
кредит;
страхование;
заключение договоров с корпоративными клиентами на обслуживание автомобилей;
Оптовая и розничная продажа запчастей для автомобилей LADA ,Lifan и др. иномарок ;
Коммерческий ремонт легковых автомобилей отечественного и импортного производства;
мойка ;
тюнинг;
трейд-ин.
Адрес автосалона: г.Новокуйбышевск,ул. Кирова, 8
телефон: 8 (84635) 2- 000 — 2
Режим работы:
Автосалон: ежедневно с 9:00 до 19:00
Сервис: ежедневно с 8:00 до 20:00
Мойка: ежедневно с 8:00 до 20:00
Мы искренне рады видеть Вас в числе наших клиентов и надеемся на плодотворное и взаимовыгодное сотрудничество.
Программа «Перспектива»
Программа «Перспектива»
|
УМК для 1 класса УМК для 2 класса УМК для 3 класса УМК для 4 класса
«Перспектива» — это учебно-методический комплекс (УМК) для начальных классов общеобразовательных учреждений, который представляет собой целостную информционно-образовательную среду, реализующую единые идеологические, дидактические и методические принципы, отвечающие требованиям Федерального государственного образовательного стандарта (ФГОС). |

УМК «Перспектива» состоит из следующих завершенных предметных линий учебников, которые включены в федеральный перечень учебников, допущенных к использованию при реализации имеющих государственную аккредитацию образовательных программ начального общего, основного общего, среднего общего образования организациями, осуществляющими образовательную деятельность (приказ Минпросвещения России от 20 мая 2020 г. N 254):
— Русский язык.
Азбука. Авторы: Климанова Л.Ф., Макеева С.Г.
Русский язык. Авторы: Климанова Л.Ф., Макеева С.Г., Бабушкина Т.В.
— Литературное чтение. Авторы: Климанова Л.Ф., Горецкий В.Г., Виноградская Л.А., Бойкина М.В.
— Математика. Авторы: Дорофеев Г.В., Миракова Т.Н., Бука Т.Б.
— Информатика. Авторы: Рудченко Т.А., Семенов А.Л.
— Окружающий мир. Авторы: Плешаков А.А., Новицкая М.Ю.
Авторы: Плешаков А.А., Новицкая М.Ю.
— Изобразительное искусство. Авторы: Шпикалова Т.Я., Ершова Л.В.
— Технология. Авторы: Роговцева Н.И., Богданова Н.В., Фрейтаг И.П., Шипилова Н.В. и др.
— Физическая культура. Автор: Матвеев А.П.
Все учебники, вошедшие в новый перечень, входили в предыдущий ФПУ 2018г. (приказ Минпросвещения России от 28.12.2018 N 345).
Учебные пособия «Музыка» Сергеевой Г.П. в перечень не вошли. До выхода предыдущего перечня в состав УМК «Перспектива» входили учебники «Музыка» Критской Е.Д., Сергеевой Г.П. и Шмагиной Т.С. Они были переизданы и включены в УМК «Школа России».
Учебники для изучения предметной области «Основы религиозных культур и светской этики» (ОРКСЭ) в 4 классе (могут использоваться в составе систем учебников «Школа России» и «Перспектива»):
— ОРКСЭ. Основы православной культуры.
Основы православной культуры.
— ОРКСЭ. Основы исламской культуры. Авторы: Латышина Д.И., Муртазин М.Ф.
— ОРКСЭ. Основы иудейской культуры. Авторы: Членов М.А., Миндрина Г.А., Глоцер А.В.
— ОРКСЭ. Основы буддийской культуры. Автор: Чимитдоржиев В.Л.
— ОРКСЭ. Основы мировых религиозных культур. Авторы: Беглов А.Л., Саплина Е.В., Токарева Е.С. и др.
— ОРКСЭ. Основы светской этики. Автор: Шемшурина А.И.
Изучение иностранных языков по следующим УМК издательства «Просвещение»:
— Английский язык «Английский в фокусе» («Spotlight»). Быкова Н.И., Дули Д., Поспелова М.Д., Эванс В. (1-4 классы)
— Английский язык «Звездный английский» («Starlight»). Баранова К.М., Дули Д., Копылова В.В., Мильруд Р.П., Эванс В. (углубленное изучение: 1-4 классы)
— Английский язык. Кузовлев В.П., Перегудова Э.Ш., Пастухова С. А., Лапа Н.М., Костина И.П., Дуванова О.В. (2-4 классы) (не включен в новый перечень)
А., Лапа Н.М., Костина И.П., Дуванова О.В. (2-4 классы) (не включен в новый перечень)
— Английский язык. Верещагина И.Н., Бондаренко К.А., Притыкина Т.А., Афанасьева О.В. (углубленное изучение: 2-4 классы)
— Английский язык. Алексеев А.А., Смирнова Е.Ю., Э.Хайн и др. (2-4 классы). УМК «Сферы»
— Немецкий язык. Бим И.Л., Рыжова Л.И., Фомичева Л.М. (2-4 классы)
— Немецкий язык «Вундеркинды Плюс». Захарова О.Л., Цойнер К.Р. (базовое и углубленное изучение: 2-4 классы)
— Французский язык «Твой друг французский язык». Кулигина А.С., Кирьянова М.Г. (2-4 классы)
— Французский язык «Французский в перспективе». Касаткина Н.М., Белосельская Т.В., Гусева А.В., Береговская Э.М. (углубленное изучение: 2-4 классы)
— Испанский язык. Воинова А.А., Бухарова Ю.А., Морено К.В. (2-4 классы)
УМК программы «Перспектива» создан на концептуальной основе, отражающей современные достижения в области психологии и педагогики, с сохранением при этом тесной связи с лучшими традициями классического школьного образования России. При создании УМК учтены не только современные требования общества, но и культурно-историческая перспектива его развития. Программа Перспектива обеспечивает доступность знаний и качественное усвоение материала, всестороннее развитие личности младшего школьника с учетом его возрастных особенностей, интересов и потребностей. Первые учебники и учебные пособия комплекта «Перспектива» начали выпускаться с 2006 года. Учебно-методический комплекс учебников «Перспектива» создавался коллективом ученых и педагогов Российской академии образования в тесном сотрудничестве с издательством «Просвещение». Научным руководителем системы учебников «Перспектива» c 2010 года стала доктор педагогических наук, лауреат Премии Президента РФ в области образования Л.Г. Петерсон.
При создании УМК учтены не только современные требования общества, но и культурно-историческая перспектива его развития. Программа Перспектива обеспечивает доступность знаний и качественное усвоение материала, всестороннее развитие личности младшего школьника с учетом его возрастных особенностей, интересов и потребностей. Первые учебники и учебные пособия комплекта «Перспектива» начали выпускаться с 2006 года. Учебно-методический комплекс учебников «Перспектива» создавался коллективом ученых и педагогов Российской академии образования в тесном сотрудничестве с издательством «Просвещение». Научным руководителем системы учебников «Перспектива» c 2010 года стала доктор педагогических наук, лауреат Премии Президента РФ в области образования Л.Г. Петерсон.
Главной целью системы учебников «Перспектива» является создание информационно-образовательной среды, обеспечивающей включение каждого ребенка в самостоятельную учебную деятельность, в процессе которой создаются условия для надежного достижения определенных ФГОС личностных, метапредметных и предметных результатов освоения основной образовательной программы начального общего образования посредством формирования универсальных учебных действий как основы ведущей образовательной компетенции — умения учиться.
Основополагающими принципами комплекта являются: гуманистический, принцип историзма, коммуникативный и принцип творческой активности. Такой принципиальный подход позволяет организовать процесс обучения с одной стороны под цель, направленную на получение знаний в соответствии с требованиями нового стандарта, с другой стороны как средство формирования универсальных учебных умений и личностных качеств, т.е. развитие и воспитание ребенка.
Идеологической основой системы учебников «Перспектива» является «Концепция духовно-нравственного развития и воспитания личности гражданина России», направленная на формирование у подрастающего поколения системы ценностей гуманизма, созидания, саморазвития, нравственности как основы успешной самореализации школьника в жизни и труде и как условия безопасности и процветания страны.
Дидактической основой системы учебников «Перспектива» является дидактическая система деятельностного метода (Л. Г. Петерсон), синтезирующая на основе методологического системно-деятельностного подхода неконфликтующие между собой идеи из современных концепций развивающего образования с позиций преемственности научных взглядов с традиционной школой (Заключение РАО от 14.07.2006 года, Премия Президента РФ в области образования за 2002 год).
Г. Петерсон), синтезирующая на основе методологического системно-деятельностного подхода неконфликтующие между собой идеи из современных концепций развивающего образования с позиций преемственности научных взглядов с традиционной школой (Заключение РАО от 14.07.2006 года, Премия Президента РФ в области образования за 2002 год).
Методической основой системы учебников «Перспектива» является методический инструментарий завершенных предметных линии учебников и специально разработанная система информационно-образовательных ресурсов.
Еще одно преимущество обучения по УМК «Перспектива» в том, что, система построения учебного материала позволяет каждому ученику поддерживать и развивать интерес к открытию и изучению нового. В учебниках задания предлагаются в такой форме, чтобы познавательная активность, познавательный интерес и любознательность ребенка переросли в потребность изучать новое, самостоятельно учиться. Ученик на каждом уроке, как бы, приоткрывает для себя содержание будущих тем. Обучение строится по диалектическому принципу, когда введение новых понятий и идей, первоначально представленных в наглядно-образной форме или в виде проблемной ситуации, предшествует их последующему детальному изучению. Каждый учебник снабжен системой заданий, направленных на развитие как логического, так и образного мышления ребенка, его воображения, интуиции. В учебниках системно выстроен теоретический материал, к которому предложены практические, исследовательские и творческие задания, позволяющие активизировать деятельность ребенка, применять полученные знания в практической деятельности, создавать условия для реализации творческого потенциала ученика.
Ученик на каждом уроке, как бы, приоткрывает для себя содержание будущих тем. Обучение строится по диалектическому принципу, когда введение новых понятий и идей, первоначально представленных в наглядно-образной форме или в виде проблемной ситуации, предшествует их последующему детальному изучению. Каждый учебник снабжен системой заданий, направленных на развитие как логического, так и образного мышления ребенка, его воображения, интуиции. В учебниках системно выстроен теоретический материал, к которому предложены практические, исследовательские и творческие задания, позволяющие активизировать деятельность ребенка, применять полученные знания в практической деятельности, создавать условия для реализации творческого потенциала ученика.
Следующая особенность УМК «Перспектива» в контексте его соответствия требованиям ФГОС — это большие возможности для решения воспитательных задач. Реализация в УМК Концепции духовно-нравственного развития и воспитания личности гражданина России направлена на формирование ценностного мировоззрения, воспитание и становление нравственной позиции личности младшего школьника. Эти задачи педагог решает в процессе обсуждения системы вопросов, проблемных и практических ситуаций, текстов, направленных на воспитание самых добрых чувств, любви и интереса к своей семье, малой и большой Родине, традициям и обычаям народов, проживающих на территории России, их культурному и историческому наследию.
Эти задачи педагог решает в процессе обсуждения системы вопросов, проблемных и практических ситуаций, текстов, направленных на воспитание самых добрых чувств, любви и интереса к своей семье, малой и большой Родине, традициям и обычаям народов, проживающих на территории России, их культурному и историческому наследию.
Основой информационно-образовательной среды для начальной школы являются завершенные предметные линии системы учебников «Перспектива». Учебники эффективно дополняют рабочие и творческие тетради, словари, книги для чтения, методические рекомендации для учителей, дидактические материалы, мультимедийные приложения (DVD-видео; DVD-диски со сценариями уроков, реализующих деятельностный метод обучения; CD-ROM диски; презентационные материалы для мультимедийных проекторов; программное обеспечение для интерактивной доски и др.), интернет-поддержка и другие ресурсы по всем предметным областям учебного плана ФГОС (ФГОС, раздел III, п.19.3.). Все это позволяет организовывать различные виды деятельности учащихся, эффективно использовать современные методы и технологии организации учебно-воспитательной работы.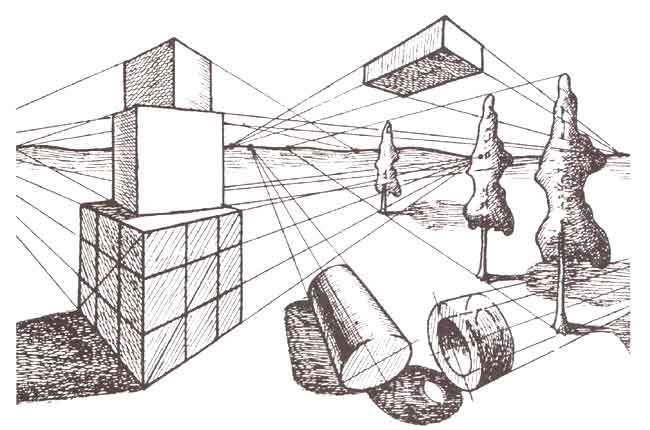
Еще одной отличительной чертой системы учебников «Перспектива», обеспечивающей ему статус ядра информационно-образовательной среды для начальной школы, является разработанная специальная система навигации, позволяющая ученику ориентироваться как внутри УМК, так и выходить за его рамки в поисках других источников информации. Таким образом, система учебников «Перспектива» интегрирована в единую идеологическую, дидактическую и методическую систему, помогающую учителю обеспечивать требования современного образовательного процесса, определяемые ФГОС.
Для УМК «Перспектива» разработано новое методическое сопровождение — «Технологические карты», помогающие учителю реализовывать требования ФГОС в образовательном процессе. «Технологические карты» — это новый методический инструментарий, обеспечивающий учителю качественное преподавание нового учебного курса путем перехода от планирования урока к проектированию изучения темы. В «Технологических картах» определены задачи, планируемые результаты (личностные и метапредметные), указаны возможные межпредметные связи, предложен алгоритм прохождения темы и диагностические работы (промежуточные и итоговые) для определения уровня освоения темы учащимися. Карты размещены на сайте издательства «Просвещение» в разделе ««Перспектива» учителям». Кроме того, для учителей и родителей разработаны дополнительные интернет-ресурсы, включающие разработки уроков, статьи и комментарии, консультативную поддержку учителей и родителей (на вопросы родителей и учителей отвечают психологи, учителя, авторы).
В «Технологических картах» определены задачи, планируемые результаты (личностные и метапредметные), указаны возможные межпредметные связи, предложен алгоритм прохождения темы и диагностические работы (промежуточные и итоговые) для определения уровня освоения темы учащимися. Карты размещены на сайте издательства «Просвещение» в разделе ««Перспектива» учителям». Кроме того, для учителей и родителей разработаны дополнительные интернет-ресурсы, включающие разработки уроков, статьи и комментарии, консультативную поддержку учителей и родителей (на вопросы родителей и учителей отвечают психологи, учителя, авторы).
Для того чтобы обеспечить эффективность использования системы учебников «Перспектива» в практической деятельности учителей, построена многоуровневая система повышения квалификации педагогов разных категорий (учителей начальной и средней школы, воспитателей дошкольных образовательных учреждений, завучей, директоров, методистов, преподавателей педколледжей и педвузов, психологов и др. ), создающая условия для поэтапного освоения ими педагогических инструментов деятельностного обучения как на федеральном уровне (в Центре системно-деятельностной педагогики «Школа 2000…» АПК и ППРО), так и в регионах на основе принципа сетевого взаимодействия.
), создающая условия для поэтапного освоения ими педагогических инструментов деятельностного обучения как на федеральном уровне (в Центре системно-деятельностной педагогики «Школа 2000…» АПК и ППРО), так и в регионах на основе принципа сетевого взаимодействия.
Созданные механизмы повышения качества работы педагогов в соответствии с требованиями ФГОС на единых идеологических, дидактических и методических основаниях открывает перспективу для реального перехода школы к реализации поставленных новых целей и ценностей образования и построения единого образовательного пространства обучения, воспитания и здоровьесбережения школьников.
Официальный сайт издательства «Просвещение»: prosv.ru, old.prosv.ru
Читать по теме:
Учебно-методический комплекс «Перспектива»
Программы начальной школы
Отзывы о программе на нашей странице ВКонтакте
Если материал вам понравился, нажмите кнопку вашей социальной сети:
ВсеКуплюПродамЗаконтрактовано | — Все —Мука ржанаяОвсяная мукаВикаВысевки пшеничныеГорчицаГорохГречкаРожьРожь 2 классРожь 3 классаРожь 4 классаЖом свеклы гранЗеленый горохКориандрКрупа гречневаяКукурузаЛьняное маслоЛёнЛюпинМакжмых рапсовый Жмых соевыйЖмых подсолнечныйМеласса свекловичнаяМука, 1 сортМука, в/сНутОвёсМасло кукурузноеМасло рапсовоеМасло подсолнечноеПолбаПросоПшенница, 1 классПшеница 2 классПшеница 3 классПшеница 4 классПшеница 5 классПшеница 6 классРапс 1 кл до 35 мкм без ГМОРапс 2 кл от 35 мкм без ГМОРапс в/с до 25 мкм без ГМОРапс с ГМОРисРасторопшаСоевое маслоПодсолнечникПодсолнечник высокоолеиновыйПодсолнечник кондитерскийСорго белоеСорго красноеСояСоя без ГМОСпельтаТритикалеСахарЧечевицаШрот расповыйШрот соевыйШрот подсолнечныйЯчменьЯчмень пивоваренный | от:
до: | от:
до: | ВсеСРТ терминал $СРТ терминал грнСРТ ПереработчикEXWFCAFOBDAFCIF | — Выберите Область —Автономная Республика КрымВинницкаяВолынскаяДнепропетровскаяДонецкаяЖитомирскаяЗакарпатскаяЗапорожскаяИвано-ФранковскаяКиевскаяКировоградскаяЛуганскаяЛьвовскаяНиколаевскаяОдесскаяПолтавскаяРовенскаяСумскаяТернопольскаяХарьковскаяХерсонскаяХмельницкаяЧеркасскаяЧерновицкаяЧерниговская |
Технологическая перспектива 2019
Пост релиз Конференции 2019
«ТЕХНОЛОГИЧЕСКАЯ ПЕРСПЕКТИВА В РАМКАХ ЕВРАЗИЙСКОГО ПРОСТРАНСТВА: НОВЫЕ РЫНКИ И ТОЧКИ ЭКОНОМИЧЕСКОГО РОСТА»
7-8 ноября, 2019
С 7 по 8 ноября 2019 года в Санкт-Петербурге прошла 5-я юбилейная Международная научно-практическая конференция «Технологическая перспектива в рамках Евразийского пространства: новые рынки и точки экономического роста».
Конференция проводится уже пятый год и привлекает к себе заинтересованное внимание научной общественности. В этом году в ней приняли участие более 200 ученых из разных регионов России, а также зарубежные гости, преподаватели ВУЗов, студенты, аспиранты, представители органов власти и бизнеса.
Организаторами Конференции выступили Санкт-Петербургский государственный университет, Санкт-Петербургский государственный экономический университет, Санкт-Петербургский политехнический университет Петра Великого, Государственный университет Телекоммуникаций им. профессора М. А. Бонч-Бруевича, Институт проблем региональной экономики Российской Академии Наук ИПРЭ РАН, Санкт-Петербургский институт информатики и автоматизации Российской Академии Наук СПИИРАН, Государственный Русский музей, Дом ученых Российской Академии Наук им. Горького.
Работу Конференции открыли Анатолий Иванович Котов, к.э.н., Специальный представитель Губернатора Санкт-Петербурга по экономическим вопросам, Юрий Николаевич Гузов, к. э.н., доцент, СПбГУ, Первый зам. Декана Экономического факультета СПбГУ и Ольга Николаевна Кораблева, Председатель Программного комитета Конференции.
э.н., доцент, СПбГУ, Первый зам. Декана Экономического факультета СПбГУ и Ольга Николаевна Кораблева, Председатель Программного комитета Конференции.
Тема Пленарного заседания 2019 года была сформулирована как Лидерство в цифровую эпоху.
По традиции, на Пленарном заседании были представлены ключевые доклады, раскрывающие актуальные тенденции технологической перспективы и инновационного развития, а также их влияния на социально-экономическую динамику. Молчанов Николай Николаевич, д.э.н., профессор, Зав. каф. Экономики исследований и разработок СПбГУ представил доклад «Маркетинг знаний и инноваций в цифровой экономике». В этом докладе были раскрыты вопросы трансформации общества в связи с ростом инновационной активности и ее влиянием на профессиональные компетенции будущего. Ковалев Валерий Викторович, д.э.н., профессор, Зав. каф. Статистики, учета и аудита СПбГУ, Заслуженный деятель науки Российской Федерации, Член Президентского совета Института профессиональных бухгалтеров и аудиторов России (ИПБ России) обозначил проблему позиционирования российских экономических журналов в информационном пространстве на примере журнала «Вестник СПбГУ. Экономика». В своем докладе он рассмотрел перспективы роста влияния отечественных периодических научных изданий на международной уровне, проблема «закрытости» международных баз для отечественных журналов и ряд других. Звонцов Александр Викторович, к.э.н., доцент, Начальник управления развития цифровой образовательной среды СПбГЭТУ «ЛЭТИ» представил доклад «Изменение подходов к организации и реализации образовательного процесса в условиях цифровой трансформации общества», в рамках которого были раскрыты задачи формирования новых методических подходов к образовательной деятельности в контексте цифровизации общественных отношений. Ильин Игорь Васильевич д.э.н., профессор, директор Высшей школы управления и бизнеса СПбПУ Петра Великого в докладе «Блокчейн и цифровые бизнес модели в логистике» раскрыл возможности использования современных технологий в логистике и преимущества распределенных реестров при выполнении логистических операций. Пузыня Наталья Юрьевна, к.э.н., доцент кафедры финансов СПбГЭУ, член ревизионной комиссии Фонда Интеллектуальной собственности, эксперт Благотворительного Фонда В.
Экономика». В своем докладе он рассмотрел перспективы роста влияния отечественных периодических научных изданий на международной уровне, проблема «закрытости» международных баз для отечественных журналов и ряд других. Звонцов Александр Викторович, к.э.н., доцент, Начальник управления развития цифровой образовательной среды СПбГЭТУ «ЛЭТИ» представил доклад «Изменение подходов к организации и реализации образовательного процесса в условиях цифровой трансформации общества», в рамках которого были раскрыты задачи формирования новых методических подходов к образовательной деятельности в контексте цифровизации общественных отношений. Ильин Игорь Васильевич д.э.н., профессор, директор Высшей школы управления и бизнеса СПбПУ Петра Великого в докладе «Блокчейн и цифровые бизнес модели в логистике» раскрыл возможности использования современных технологий в логистике и преимущества распределенных реестров при выполнении логистических операций. Пузыня Наталья Юрьевна, к.э.н., доцент кафедры финансов СПбГЭУ, член ревизионной комиссии Фонда Интеллектуальной собственности, эксперт Благотворительного Фонда В. Потанина выступила с докладом «Цифровая экономика, цифровые права и цифровые активы». Этот доклад был посвящен вопросам формирования законодательного пространства интеллектуальной собственности в условиях цифровой трансформации. Ценжарик Мария Казимировна, к.э.н., доцент каф. Экономики предприятия и предпринимательства СПбГУ представила доклад «Цифровая интенсивность внешней среды компании как фактор цифровой трансформации», в рамках которого осветила проблему влияния цифровизации на активизацию взаимодействия бизнеса и внешней среды.
Потанина выступила с докладом «Цифровая экономика, цифровые права и цифровые активы». Этот доклад был посвящен вопросам формирования законодательного пространства интеллектуальной собственности в условиях цифровой трансформации. Ценжарик Мария Казимировна, к.э.н., доцент каф. Экономики предприятия и предпринимательства СПбГУ представила доклад «Цифровая интенсивность внешней среды компании как фактор цифровой трансформации», в рамках которого осветила проблему влияния цифровизации на активизацию взаимодействия бизнеса и внешней среды.
7 ноября на площадке Дома Ученых РАН им. Горького были проведены заседания секций:
«Наукоемкая экономика и социо-киберфизические системы: Трансформация бизнес ландшафта и инженерия предприятия», руководители: Кораблева Ольга Николаевна, д.э.н., профессор СПбГУ, Председатель секции «Наукоемкая экономика и управление знаниями» Дома ученых РАН; Молчанов Николай Николаевич, д.э.н., профессор СПбГУ, Зав. каф. ЭИиР; Родригес да Сильва Альберто, PhD, Habilitat, кафедра информатики и инженерии IST / UL, старший научный сотрудник INESC-ID Lisboa.
«Информационные технологии в формировании цифрового общества», руководители: Кулешов Сергей Викторович, д.т.н., Зам. по научной работе СПИИРАН, Трофимов Валерий Владимирович, д.э.н., проф., Зав. каф. Информатики СПбГЭУ, Барабанова Марина Ивановна, к.э.н., доцент, декан ф-та Информатики и прикладной математики СПбГЭУ.
«Финансовые системы: архитектура, технологии, инжиниринг», руководители: Воронова Наталья Степановна д.э.н., проф. каф. Теории кредита и финансового менеджмента СПбГУ, Львова Надежда Алексеевна, д.э.н., проф. каф. Теории кредита и финансового менеджмента СПбГУ, Харченко Лариса Павловна, д.э.н., проф. СПбГЭУ
«Образование в цифровом обществе», руководители: Борисов Николай Валентинович, д. физ-мат. наук, профессор, Зав.каф. Информационные системы в искусстве СПбГУ, Гаевская Елена Георгиевна, к.п.н., доцент каф. Информационные системы в искусстве СПбГУ.
«Системный анализ и кибернетика: история и перспективы взаимодействия», руководители: Соколов Борис Владимирович, д.т.н., профессор, Зав. лаб. СПИИРАН, председатель секции Кибернетики имени акад. А.И. Берга СПб Дома ученых РАН; Колесов Дмитрий Николаевич, к.э.н., Зав. каф. Экономической кибернетики СПбГУ; Волкова Виолетта Николаевна, д.э.н., профессор СПбПУ Петра Великого, заслуженный работник высшей школы РФ, руководитель Научного совета по проблемам высшего образования, подготовки и аттестации научно-педагогических кадров СПб отделения МАН ВШ, со-председатель секции Кибернетики имени акад. А.И. Берга СПб Дома ученых РАН.
Во второй день конференции — 8 ноября, работа Конференции была продолжена в Санкт-Петербургском государственном университете и в Государственном Русском музее.
Так, в СПбГУ прошла секция «Устойчивое развитие российской Арктики в условиях промышленной трансформации и интернационализации», руководитель: Ветрова Елена Николаевна, д.э.н., проф. СПбГЭУ. В рамках секции обсуждались актуальные вопросы развития Арктики в современных условиях.
Секция «Искусство и технологии», была организована под руководством Гладких Марии Юрьевны, Начальник службы «Виртуальный Русский музей» Государственного Русского музея. Русский музей третий год подряд принимает участников конференции на своей площадке. В этом году к обсуждению вопросов, находящихся на стыке искусства и современных технологий, присоединились эксперты из Государственного Эрмитажа, Государственного Дарвиновского музея, Музея-панорамы «Бородинская битва», и другие участники.
Результаты работы Конференции обобщены в сборнике трудов, который выпускается ежегодно и индексируется в РИНЦ.
По итогам работы Конференции можно с уверенностью сказать, что она стала ожидаемым ежегодным научным и культурным событием Северной Столицы. Каждый год география участников расширяется, темы докладов отражают перспективные тенденции науки и бизнеса, в рамках обсуждений выдвигаются передовые идеи и рекомендации, позволяющие повысить эффективность социально-экономического развития в условиях цифровой трансформации. При этом организаторы проводят мероприятие в петербургских традициях, давая возможность участникам погрузиться в атмосферу науки и творчества с 300-летней историей.
Статьи
Актуальность. В статье обсуждается актуализация понятия «региональной идентичности» для психологической науки. Во многом впервые происходит сравнение категориальной структуры представлений о страАктуальность. В свете изменений, происходящих в системе образования России, перехода к компетентностной парадигме, особое значение имеет изучение ресурсов и потенциалов как составляющих образовательного капитала. Этот вопрос еще недостаточно исследован в эмпирической плоскости.
Цель. Изучить индивидуально-интеллектуальные интеграции в 3-х периодах времени (в настоящем, в будущем, в будущем как обновленном настоящем — как раздельно, так и совместно) при исследовании выборки студентов гуманитарных специальностей.
Метод. В основу исследования положены представления о кросс-теоретическом синтезе теории интегральной индивидуальности В.С. Мерлина (1986) и структурно-динамической теории интеллекта Д.В. Ушакова (2011). В исследовании приняли участие 252 студента вузов г. Перми, из них 190 девушки и 62 юноши в возрасте от 17 до 22 лет. Гипотезы тестировались методом структурного моделирования. Были построены четыре модели индивидуально-интеллектуальных интеграций по критерию времени. В 3 моделях изучались индивидуально-интеллектуальные интеграции по отдельности в настоящем, в будущем, в будущем как обновленном настоящем. В 4-ю, медиаторную модель индивидуально-интеллектуальных интеграций настоящее, будущее, будущее как обновленное настоящее включались совместно.
Результаты. Обнаружено, что индивидуально-интеллектуальные интеграции возникают в каждом периоде времени по отдельности. В настоящем их можно трактовать предпосылками ресурсов, в будущем — предпосылками реализованных потенциалов, в будущем как обновленном настоящем — предпосылками обновленных ресурсов. Взятые совместно во всех периодах времени, индивидуально-интеллектуальные интеграции также были установлены. Они позволили расширить представление о «спирали развития» в дополнение к предыдущей трактовке (Дорфман, Калугин, 2020 а) и рассматривать ее по схеме «настоящее — будущее — реализованное будущее (обновленное настоящее)».
Выводы. Результаты исследования свидетельствуют о том, что индивидуально-интеллектуальные интеграции, представленные в трех периодах времени (в настоящем, в будущем, в будущем как обновленном настоящем), как раздельно, так и совместно, могут рассматриваться предпосылками ресурсов и потенциалов.
Благодарности: Исследование выполнено при финансовой поддержке Российского фонда фундаментальных исследований (РФФИ) в рамках научного проекта № 19-29-07046.не и о собственном регионе.
Цель. Сравнение образа России и образов собственных регионов у молодежи, проживающей в различных субъектах страны.
Методика. Методика семантического шкалирования с дальнейшей факторизацией полученных данных. В исследовании приняло участие 318 респондентов из 8 различных макрорегионов страны.
Результаты. Была получена 6-факторная структура представлений образа России и образа собственного региона. Данные структуры имеют свои существенные различия, как по самой структуре факторов, так и по степени важности иерархии факторов. Региональная идентичность молодёжи в определённой степени обуславливает модальность принятия гражданской идентичности.
Выводы. По результатам исследования можно утверждать следующее, что для тех представителей молодёжи, у которых складывался положительный образ собственного региона, формировался и положительный образ страны в целом.
Благодарности. Исследование выполнено при поддержке Российского фонда фундаментальных исследований, проект № 19-313-90069.
Особая благодарность за помощь в организации сбора данных Звездиной Анастасии, начальнику отдела Центра молодежных проектов АНО ДПО «Корпоративный университет РЖД».
Ключевые слова: интегральная индивидуальность; интеллект; индивидуально-интеллектуальная интеграция; ресурсы; потенциалы; структурное моделирование
Поза точки с перспективой — документация ISAAC 2021.1
Задача позы Perspective-n-Point (PnP) — это задача оценки относительной позы. — Трехмерное положение и ориентация — между откалиброванной перспективной камерой и трехмерным объектом (или между камерой и всей 3D-сценой) из набора n видимых 3D-точек с известными (X, Y, Z) координатами объекта (или сцены) и их 2D-проекциями с известные (u, v) координаты пикселей.
Проблема PnP актуальна при отслеживании 3D-объектов и локализации / слежении камеры и часто используется, например, в структурах из движения (SfM), визуальной одометрии (VO), одновременной локализации и конвейеры отображения (SLAM) и локализации на основе изображений.
Isaac SDK предоставляет PnP GEM и простой C ++ API для решения проблемы PnP. Он содержит реализацию алгоритма EPnP и его адаптацию к входам, загрязненным по грубым выбросам с помощью варианта стандартного алгоритма RANSAC.
Решатель EPnP
Свойства реализации EPnP в Isaac SDK:
- Предполагается модель перспективной проекции.
- Требуются известные встроенные функции камеры. Обычно они определяются в предварительном автономном режиме. процедура калибровки камеры.Некоторые камеры с фиксированным объективом хранят и предоставляют эти параметры во время выполнения.
- Требуется не менее 6 совпадений точек 2D-3D, каждое совпадение 2D-3D приведено в соответствие через перспективную проекцию.
- EPnP работает с множеством (n >> 6) совпадений точек вхождения по методу наименьших квадратов. Чем больше очков используется, тем выше точность позы. Это отличается от многих других алгоритмов PnP, которые предназначены для определенного n (например, P3P).
- Поддерживает трехмерные точки как в планарной, так и неплоской конфигурации.
- Предполагает ввод без выбросов, как и большинство других решателей PnP (см. Ниже, как обрабатывать выбросы).
Дополнительные сведения об алгоритме EPnP см. В следующем документе: В. Лепети, Ф. Морено-Ногер, П. Фуа, EPnP: точное O (n) решение проблемы PnP, IJCV 2008
Обработка выбросов
Решатель EPnP (как и большинство минимальных решателей PnP) не обрабатывает выбросы. Если ваши входные данные загрязнены выбросами 2D-3D совпадений, вам необходимо использовать его робастированные приспособление.GEM предоставляет для этой цели вариант стандартного алгоритма RANSAC. Он многократно выполняет следующие шаги:
- Произвольная выборка набора из 6 различных входных 2D-3D совпадений из полного входного набора. Любое входное совпадение выбирается с равным шансом (равномерное распределение).
- Вычислите гипотезу позы на основе 6-балльной выборки, используя алгоритм EPnP.
- Оценить качество гипотезы позы на основе для каждого входного совпадения (не только в образце).Используется схема мягкой оценки. Оценка каждого входного совпадения зависит от ошибка его репроецирования в пикселях согласно гипотезе позы. Вклад равен 1 при нулевой ошибке перепроецирования и плавно исчезает при ошибка перепроецирования увеличивается до установленного пользователем порогового значения.
- Сохраните K различных гипотез с наивысшим баллом (K также задается пользователем). K = 1 соответствует стандартной схеме RANSAC. K> 1 может быть полезно для захвата всех допустимых решений в случае неоднозначности позы.В таких случаях устранение неоднозначности может быть возможно на основе дополнительной (например, временной) информации. это выходит за рамки решателя PnP.
Наконец, каждая из главных гипотез перерабатывается до своих исходных значений с помощью EPnP (n> = 6). Обновленные позы, их оценка и список вставок возвращаются алгоритмом.
Этот алгоритм многократно вызывает 6-точечный решатель EPnP и находит решение, если хотя бы один случайных выборок (из 6 входных совпадений) оказывается без выбросов.Чем больше количество экспериментов (определяемых пользователем), тем выше шанс на успех.
GEM предоставляет функцию, которая использует стандартную формулу RANSAC для оценки количества экспериментов, необходимых для успеха с определенной вероятностью (например, 0,99). Чем ближе требуемый уровень успеха к 1, тем выше время выполнения. Например, количество проб, необходимое для получения решения с вероятностью 99%. приведена в таблице ниже для различных коэффициентов выбросов, предполагая большой размер входных данных.Чтобы использовать формулу, вам необходимо иметь оценку ожидаемого выброса в наихудшем случае. Используйте формулу RANSAC с осторожностью, потому что она приблизительна и, как известно, оптимистична. когда количество входных точек мало или когда входные координаты очень зашумлены.
| % выбросов | 5% | 10% | 20% | 25% | 30% | 40% | 50% |
| 6-точечные образцы | 4 | 7 | 16 | 24 | 37 | 97 | 293 |
| (при условии мин.99% успеха, большой размер ввода, идеальные вставки) | |||||||
Запуск примеров
Два примера представлены для демонстрации базового использования API PnP C ++.
-
epnp_exampleдля прямого использования решателя EPnP (без выбросов). -
epnp_ransac_exampleдля использования EPnP с RANSAC (подано с некоторыми выбросами).
В примерах используется имитация ввода без ( epnp_example ) и с
( epnp_ransac_example ) выбросы и распечатайте вычисленную позу и остаток
ошибки перепроецирования в пикселях на консоль.В этих примерах вставки имеют субпиксельную точность (порядка 0,01 пикселя),
в то время как выбросы имеют большой остаток и, следовательно,
не влияют на расчетную позу.
Для запуска примеров в хост-системе
Создайте примеры с помощью следующей команды:
bob @ desktop: ~ / isaac / sdk $ bazel build // пакеты / pnp / examples: epnp_example bob @ desktop: ~ / isaac / sdk $ bazel build // пакеты / pnp / примеры: epnp_ransac_example
Запустите примеры с помощью следующей команды:
боб @ рабочий стол: ~ / isaac / sdk $ bazel-bin / packages / pnp / examples / epnp_example bob @ desktop: ~ / isaac / sdk $ bazel-bin / packages / pnp / examples / epnp_ransac_example
Для запуска примеров на Jetson
Предполагая, что — это IP-адрес вашей системы Jetson, выполните следующие действия:
- Создайте пакет примера на хосте.
- Разверните // packages / pnp / examples: pnp-examples на роботе, как описано в параметрах консоли приложения.
Войдите в систему Jetson и запустите приложение с следующие команды:
bob @ jetson: ~ / $ cd deploy / bob / pnp-examples bob @ jetson: ~ / развертывание / bob / pnp-examples $ пакеты / pnp / examples / epnp_example bob @ jetson: ~ / deploy / bob / pnp-examples $ пакеты / pnp / examples / epnp_ransac_example
Производительность
Точность позы
Точность позы, ожидаемая от EPnP, показана на графиках ниже в качестве примера. неплоское (вверху) и планарное расположение (внизу).Графики показывают среднюю ошибку поворота в градусах (слева) и среднюю ошибку позиционирования камеры (справа). в зависимости от количества шума во входных 2D-координатах. Кривые получены путем моделирования большого количества камер со случайным расположением и ориентация, а затем моделирование зашумленных совпадений 2D-3D для каждой камеры, оценка позы с помощью EPnP, и измерение ошибки позы.
Чем точнее вводятся координаты и тем больше используется вводных точек. чем выше точность оценки позы и тем выше время выполнения.Непланарные конфигурации обычно имеют более высокую точность.
График ниже показывает, как ошибка уменьшается с увеличением количества точек (плоский случай). для разного уровня шума в координатах 2D точки.
Время выполнения
Проверенные временем работы EPnP для Jetson Nano приведены ниже. Из таблицы видно, что среда выполнения EPnP сублинейен по количеству точек в тестируемом диапазоне. Эти результаты являются средними более 100 случайных симуляций (неплоский случай) и более 10 прогонов на набор данных.
| Очки | Время выполнения |
|---|---|
| 6 | 0,28 мс |
| 10 | 0,29 мс |
| 50 | 0,51 мс |
| 100 | 0,79 мс |
| 500 | 3,19 мс |
| 1000 | 6,17 мс |
Время выполнения RANSAC с EPnP приблизительно равно количеству экспериментов, умноженному на время выполнения 6-балльной EPnP плюс время на переосмысление K лучших гипотез ко всем их соответствующим инлиерам (K раз EPnP для n >> 6 баллов).
Проблема точки перспективы (PnP)
Проблема точки перспективы (PnP)Проблема точки перспективы (PnP)
Движущееся твердое тело нужно « придавить », используя наблюдаемые особенности. Это называется проблемой перспективы — точка (или PnP ). Мы можем позаимствовать большую часть математики из главы 3; однако здесь мы рассматриваем размещение тел в реальном мире , а не в виртуальном мире. Кроме того, у нас есть обратная задача , которая заключается в определении положения тела на основе точек на изображении.До сих пор рассматривалась обратная проблема. Для визуального рендеринга в главе 7 изображение было создано на основе известного положения тела в (виртуальном) мире.
Элементы могут быть размещены на теле или в окружающем мире, в зависимости от метода зондирования. А пока предположим, что они есть на теле. Каждому объекту соответствует точка с координатами, заданными в кадре тела. Пусть будет однородной матрицей преобразования, которая содержит параметры позы, которые предполагаются неизвестными.Применение преобразования к точке, как в (3.22), могло бы разместить ее где угодно в реальном времени. Вспомните цепочку преобразований (3.41), которая, кроме того, определяет, где каждая точка тела должна появиться на изображении. Матрица удерживала позу камеры, а также содержала перспективную проекцию и преобразовывала проецируемую точку в координаты изображения.
Теперь предположим, что особенность была обнаружена в месте в координатах изображения. Если неизвестно, но все другие преобразования заданы, тогда потребуется оценить шесть независимых параметров, соответствующих степеням свободы.Наблюдение обеспечивает два независимых ограничения на цепочку преобразований (3.41), одно и одно для. Таким образом, твердое тело теряет степень свободы, как показано на рис. 9.14. Это была проблема P1P, потому что количество функций было равно одной.
Задача P2P соответствует наблюдению двух функций на изображении и приводит к четырем ограничениям. В этом случае каждое ограничение устраняет две степени свободы, в результате чего остаются только две степени свободы; см. рисунок 9.14. Далее, если наблюдаются три особенности, то для задачи P3P остаются нулевые степени свободы (за исключением случая, когда на теле выбраны коллинеарные элементы).Может показаться, что проблема полностью решена; однако нулевые степени свободы допускают множественные решения (они являются изолированными точками в пространстве решений). Задача P3P соответствует попытке поместить данный треугольник в пирамиду, образованную лучами, так, чтобы каждая вершина треугольника касалась другого луча. Обычно это можно сделать четырьмя способами, которые трудно представить. Представьте, что вы пытаетесь разрезать высокую тонкую пирамиду (симплекс) из сыра так, чтобы четыре разных ломтика имели одинаковый треугольный размер и форму.Случаи P4P и P5P также приводят к неоднозначным решениям. Наконец, в случае P6P уникальные решения всегда получаются, если никакие четыре функции не компланарны. Все математические детали разработаны в [361].
Проблема PnP была описана в идеальном случае наличия точных назначений координат для характерных точек на теле и идеального наблюдения за ними в процессе визуализации. На практике небольшие ошибки допускаются из-за таких факторов, как шум сенсора, квантование изображения и производственные допуски.Это приводит к неоднозначности и ошибкам в оценке позы, которые могут существенно отклоняться от правильного ответа [286]. Следовательно, на практике можно использовать гораздо больше функций для повышения точности. Кроме того, процедура калибровки, такая как регулировка пучка [112,285,331], может применяться до использования устройства, так что местоположения характерных точек могут быть более точно назначены перед выполнением оценки позы. Надежность можно повысить, используя RANSAC [78].
Стивен М. ЛаВалль 2020-01-06(PDF) Надежное O (n) решение проблемы перспективных n точек
16
[2] D.Форсайт и Дж. Понсе, Компьютерное зрение: современный подход. Prentice Hall Professional Technical Reference, 2002.
[3] Р. Хартли и А. Зиссерман, Геометрия с множеством представлений в компьютерном зрении. Cambridge University Press, New York,
NY, USA, 2003.
[4] В. Лепетит, Ф. Морено-Ногер и П. Фуа, «Epnp: точное решение проблемы pnp», Международный журнал компьютерного зрения
, вып. 81, нет. 2, pp. 155–166, 2008.
[5] J. McGlone, E.Михаил и Дж. Бетел, Руководство по фотограмметрии (5-е издание). Американское общество фотограмметрии
и дистанционного зондирования Bethesda, MD, 2004.
[6] В. Лепет и П. Фуа, «Распознавание ключевых точек с использованием рандомизированных деревьев», IEEE Transactions on Pattern Analysis и
Machine Intelligence, vol. 32, pp. 1465–1479, 2006.
[7] И. Скрипник и Д. Лоу, «Моделирование, распознавание и отслеживание сцен с инвариантными функциями изображения», в Proceedings
3-го Международного симпозиума IEEE / ACM по смешанным технологиям. и дополненная реальность.IEEE Computer Society, 2004 г., стр.
119.
[8] Д. Дементон и Л. Дэвис, «Точные и приближенные решения перспективной трехточечной задачи», IEEE
Transactions on Pattern Analysis and Machine Intelligence, vol. 14, вып. 11, pp. 1100–1105, 1992.
[9] Б. Харалик, К. Ли, К. Оттенберг и М. Нил, «Обзор и анализ решений задачи оценки позы с трехточечной перспективой
. ”Международный журнал компьютерного зрения, вып. 13, вып.3, pp. 331–356, 1994.
[10] X. Gao, X. Hou, J. Tang и H. Cheng, «Полная классификация решений для перспективной трехточечной проблемы»,
IEEE Transactions. по анализу шаблонов и машинному интеллекту, т. 25, pp. 930–943, 2003.
[11] W. Wolfe, D. Mathis, C. Sklair и M. Magee, «Перспективный взгляд на три точки», IEEE Transactions on Pattern
Analysis and Machine Разведка, т. 13, вып. 1, pp. 66–73, 1991.
[12] М. Амеллер, Б.Триггс и Л. Куан, «Новые линейные алгоритмы позы камеры», в ECCV, 2000.
[13] Л. Чжи и Дж. Танг, «Полный линейный 4-точечный алгоритм для определения позы камеры», AMSS , Academia Sinica,
vol. 21, pp. 239–249, 2002.
[14] М. Абиди и Т. Чандра, «Новое эффективное и прямое решение для оценки позы с использованием четырехугольных целей:
Алгоритм и оценка», IEEE Transactions on Pattern Analysis and Машинный интеллект, т. 17, нет. 5, стр.535,
1995.
[15] М. Буйнак, З. Кукелова и Т. Пайдла, «Общее решение проблемы p4p для камеры с неизвестным фокусным расстоянием
», в CVPR, 2008.
[ 16] Б. Триггс, «Поза камеры и калибровка по 4 или 5 известным трехмерным точкам», на Международной конференции по компьютерному зрению
. IEEE Computer Society, 1999, стр. 278, iccv.
[17] Ю. Абдель-Азиз и Х. Карара, «Прямое линейное преобразование координат компаратора в пространственные координаты
координат в ближней фотограмметрии», Proc.Симпозиум ASP / UI по фотограмметрии с близкого расстояния, 1971,
стр. 1–18.
[18] Л. Куан и З. Лан, «Определение положения камеры с линейной n-точкой», IEEE Transactions on Pattern Analysis and Machine
Intelligence, vol. 21, нет. 8, pp. 774–780, 1999.
[19] А. Ансар и К. Даниилидис, «Линейная оценка позы по точкам или линиям», IEEE Transactions on Pattern Analysis
and Machine Intelligence, vol. 25, pp. 578–589, 2003.
[20] П. Фиоре, Б. Сист и Н.Мерримак, «Эффективное линейное решение внешней ориентации», IEEE Transactions on Pattern
Analysis and Machine Intelligence, vol. 23, нет. 2, pp. 140–148, 2001.
[21] Г. Швайгхофер и А. Пинц, «Глобально оптимальное o (n) решение проблемы pnp для общих моделей камер»,
в Proceedings of the British Machine Vision Конференция, 2008 г., материалы Британской конференции по машинному зрению.
[22] К. Лу, «Быстрая и глобально сходящаяся оценка позы на основе видеоизображений», IEEE Transactions on Pattern Analysis
and Machine Intelligence, vol.22, нет. 6, pp. 610–622, 2000.
[23] Д. ДеМентон и Л. Дэвис, «Модельная поза объекта в 25 строках кода», Международный журнал компьютерного зрения,
том. 15, нет. 1, pp. 123–141, 1995.
13 декабря 2013 г. ПРОЕКТ
Frontiers | Событийное решение проблемы перспективных n точек
1. Введение
Проблема точки перспективы — n — обычно называемая P n P — это проблема нахождения относительной позы между объектом и камерой из набора пар n между трехмерными точками объекта и соответствующие им 2D-проекции на фокальную плоскость, предполагая, что модель объекта доступна.С тех пор, как она была официально представлена в 1981 году (Fischler and Bolles, 1981), проблема P n P нашла множество применений в фотограмметрии и компьютерном зрении, таких как отслеживание (Lepetit and Fua, 2006), визуальное сервоуправление (Montenegro Campos and de Соуза Коэльо, 1999), или дополненная реальность (Скрипник, Лоу, 2004).
Для трех или четырех точек с неколлинеарными проекциями на фокальную плоскость проблема P n P может быть решена с некоторой неоднозначностью позы камеры (Haralick et al., 1994). Когда необходимо рассмотреть больше точек, стандартный метод заключается в минимизации суммы некоторой квадратичной ошибки, обычно определяемой на фокальной плоскости. Существующие методы различаются способом минимизации этой функции ошибок и могут быть классифицированы как итерационные (см. Dementhon and Davis, 1995) и неитеративные (Lepetit et al., 2008). Другие методы вместо этого рассматривают функцию ошибок объектного пространства (Lu et al., 2000; Schweighofer and Pinz, 2006). Преимущество такого подхода состоит в том, что правильное сопоставление трехмерных точек приводит к правильной двумерной проекции на фокальную плоскость, в то время как обратное не всегда верно.
Современные методы, предназначенные для работы с изображениями, неизбежно ограничиваются низкой частотой кадров обычных камер, обычно в диапазоне 30–60 Гц. Стробоскопическая съемка на основе кадров вызывает избыточные данные и временные промежутки, которые затрудняют оценку положения трехмерного объекта без дорогостоящих вычислительных методов итеративной оптимизации (Chong and Zak, 2001). Методы на основе кадров подходят для многих приложений, если частота кадров позволяет фиксировать движение.Однако, даже если частота кадров достаточна, обработка нерелевантной информации является обязательной. В этой статье представлен новый подход, разработанный для работы с выходными данными асинхронной нейроморфной камеры, основанной на событиях. Нейроморфные камеры — это новый тип датчиков зрения, которые работают по новой парадигме сбора данных: вместо того, чтобы фиксировать статические изображения сцены, они записывают изменения интенсивности пикселей в точные моменты времени, когда они происходят. Это приводит к высокой временной точности, которая предоставляет информацию о динамике сцены, которая вносит сдвиг парадигмы в визуальную обработку, как показано в предыдущих статьях (Clady et al., 2014; Lagorce et al., 2014).
Насколько нам известно, это первый алгоритм P n P, разработанный для работы с асинхронным выходом нейроморфных датчиков зрения, основанных на событиях. В Ni et al. (2014) вводится основанный на событиях итеративный алгоритм отслеживания ближайшей точки (ICP), подобный алгоритму отслеживания, где шаблон представляет собой двумерное облако точек, которое обновляется с каждым входящим событием, так что оно соответствует проекции данного объекта. Однако их решение предполагает, что паттерн претерпевает некоторое аффинное преобразование (Coxeter, 1961), и поэтому не учитывает более общее преобразование из-за перспективной проекции, в котором объект, свободно развивающийся в трехмерном пространстве, может экспериментировать.Кроме того, поза объекта в трехмерном пространстве никогда не оценивается. Работа Ni et al. был расширен в Reverter Valeiras et al. (2016), где мы представили алгоритм оценки трехмерной позы на основе событий. В Reverter Valeiras et al. (2016) модель объекта задается как набор точек, ребер и граней и итеративно привлекается к линии обзора каждого входящего события. Однако этот метод основан на предположении, что оценка всегда близка к истинной позе объекта, и поэтому требует ручного шага инициализации.Техника, описанная в настоящей статье, во многом вдохновлена работой Лу и др. (2000), призвана преодолеть это ограничение.
Основная мотивация этой работы — ее применение к визуальному сервоингу. Наша цель — построить достаточно быструю и эффективную петлю восприятия-действия, чтобы соответствовать характеристикам биологических сенсомоторных систем. Исходя из прошлого опыта, методы нейроморфного восприятия кажутся наиболее многообещающим способом достижения этой цели.
2. Материалы и методы
2.1. Визуализация на основе событий
Нейроморфные камеры — это новый тип биомиметических датчиков зрения, часто называемых «кремниевыми сетчатками». В отличие от обычных формирователей изображений, эти устройства не управляются искусственно созданными тактовыми сигналами, не имеющими отношения к источнику визуальной информации (Lichtsteiner et al., 2008). Вместо этого нейроморфные камеры управляются «событиями», происходящими внутри сцены, и они передают информацию асинхронно, как это делает биологический глаз.
Одной из первых попыток создания нейроморфного датчика зрения, включающего функции сетчатки, является новаторская работа Маховальда (1992) в конце восьмидесятых. С тех пор было создано множество таких устройств, основанных на событиях, в том числе датчики на основе градиента, чувствительные к статическим краям (Delbrück, 1993), датчики временного контраста, чувствительные к относительному изменению освещенности (Lichtsteiner et al., 2008; Posch et al. ., 2008, 2011), устройства, чувствительные к ориентации края, и датчики оптического потока (Etienne-Cummings et al., 1997; Краммер и Кох, 1997). Большинство этих датчиков выводят сжатые цифровые данные в форме асинхронных адресных событий (AER; Boahen, 2000), устраняя избыточность, уменьшая задержку и увеличивая динамический диапазон по сравнению с традиционными устройствами формирования изображений. Исчерпывающий обзор нейроморфных датчиков зрения можно найти в Delbrück et al. (2010) и Posch et al. (2014).
Представленное решение проблемы P n P предназначено для работы с такими датчиками и полностью использует преимущества разреженного представления данных и высокого временного разрешения их вывода.Асинхронный датчик изображения во времени (ATIS), используемый в этой работе, представляет собой датчик технического зрения с кодированием во временной области и разрешением 304 × 240 пикселей (Posch et al., 2008). Датчик содержит массив полностью автономных пикселей, которые объединяют схему детектора изменения освещенности и блок измерения условной экспозиции. Как показано на функциональной схеме пикселя ATIS на рисунке 1, детектор изменений индивидуально и асинхронно инициирует измерение значения экспозиции / шкалы серого только в том случае, если — и сразу после — в поле было обнаружено изменение освещенности определенной величины. — обзора соответствующего пикселя.Схема измерения экспозиции в каждом пикселе индивидуально кодирует абсолютную освещенность пикселя в хронометраж асинхронных импульсов событий, более точно в интервалы между событиями.
Рис. 1. Функциональная схема пикселя ATIS ( Posch et al., 2011 ) . Два типа асинхронных событий, информация об изменении кодирования (вверху) и освещенности (внизу), генерируются и передаются индивидуально каждым пикселем в массиве изображения, когда в сцене обнаруживается изменение.На нижнем правом изображении показаны только те пиксели в оттенках серого, для которых недавно была измерена освещенность. Черные пиксели указывают места, где в последнее время не измеряли освещенность.
Поскольку ATIS считывает события по мере их возникновения, ее временное разрешение очень точное — порядка микросекунд. Кодирование во временной области информации об интенсивности автоматически оптимизирует время экспозиции отдельно для каждого пикселя вместо того, чтобы устанавливать фиксированное время интегрирования для всего массива, что приводит к исключительно высокому динамическому диапазону и улучшенному соотношению сигнал / шум.Работа детектора изменения отдельных пикселей дает почти идеальное подавление временной избыточности, что приводит к разреженному кодированию данных изображения. Кадры отсутствуют в этом процессе приобретения. Однако при необходимости их можно реконструировать на частотах, ограниченных только временным разрешением пиксельных схем (до сотен килофреймов в секунду). Восстановленные изображения с сенсора использовались для отображения.
Математически поток событий можно описать следующим образом: пусть ek = (ukT, tk, pk) T будет четверкой, описывающей событие, происходящее в момент времени t k в позиции uk = (xk, yk) T в фокальной плоскости.Два возможных значения для p k — 1 или -1, в зависимости от того, было обнаружено положительное или отрицательное изменение освещенности.
2.2. Событийное решение проблемы P
n P2.2.1. Постановка проблемы
Давайте представим сцену с движущимся твердым объектом, наблюдаемым с калиброванной кремниевой сетчатки, как показано на рисунке 2A. Пусть { V i } будет моделью объекта, описанной как набор трехмерных точек Vi = (Xi, Yi, Zi) T.К этому объекту прикреплена система отсчета, начало которой мы обозначим как V 0 .
Рис. 2. (A) Объект, представленный как набор трехмерных точек { V i }, наблюдается калиброванной кремниевой сетчаткой. Истинная поза объекта задается ( R , T ), а предполагаемая поза обозначается ( R *, T *).К оценке прилагается система отсчета, начало которой мы обозначим как V 0 *. Событие e k должно быть сгенерировано точкой, лежащей на линии обзора события, направление которой задается вектором M k . Точка события создания объекта e k обозначается индексом i ( k ). Q i ( k ) — тогда проекция V * i ( k ) на соответствующую линию обзора. Когда оценка совпадает с истинным положением объекта, тогда Q i ( k ) и V * i ( k ) одинаковы. (B) Чтобы решить вращение, мы строим следующую виртуальную механическую систему: источник оценки V 0 * связан с миром сферическим шарниром, и каждая точка оценки V * i ( k — j ) генерирует событие e k — j связан с соответствующей линией обзора линейной пружиной.Моделирование поведения этой механической системы эквивалентно минимизации ошибки коллинеарности.
Проекция точечного отверстия отображает трехмерные точки V i , выраженные в системе отсчета объекта, в v i на фокальной плоскости камеры, в соответствии с соотношением:
(vi1) ~ K (R T) (Vi1), (1), где K — матрица 3 × 3, определяющая внутренние параметры камеры, полученные с помощью предварительной процедуры калибровки, а R ∈ SO (3), T ∈ ℝ 3 — внешние.Знак ~ указывает на то, что равенство определено с точностью до шкалы (Hartley, Zisserman, 2003). ( R , T ) также называют относительной позой между объектом и камерой (Murray et al., 1994). По мере движения объекта меняется только поза, которую необходимо оценить. Мы обозначим ( R *, T *) нашу текущую оценку позы, которую мы обновляем с входящими событиями. Соответствующие точки оценки обозначаются как Vi * и вычисляются с помощью выражения:
Аналогично, начало системы координат, связанной с оценкой, обозначается как V0 *.
2.2.2. Формализмы вращения
Матрицы вращения — один из наиболее широко используемых формализмов для представления поворотов, и они будут использоваться на протяжении всей статьи для разработки нашего алгоритма. Однако возможны и другие представления, каждое со своими достоинствами и недостатками (Murray et al., 1994). Например, матрицы поворотов плохо подходят для визуализации. Следовательно, при попытке визуализировать повороты мы будем использовать представление ось-угол, где вращение выражается как вектор вращения r = ϕr ~, где r ~ — единичный вектор в направлении оси вращения, а ϕ — вращение. угол.
2.2.3. Ошибка коллинеарности пространства объекта
Рассмотрим событие ek = (ukT, tk, pk) T, происходящее в момент времени t k в местоположении uk = (xk, yk) T. Согласно модели камеры-обскуры, мы знаем, что это событие должно быть сгенерировано точкой, лежащей на линии обзора события e k — линии, определяемой оптическим центром и пространственным положением событие в фокальной плоскости — как показано на рисунке 2A.Предполагая, что мы можем определить, какая точка объекта сгенерировала событие, мы пытаемся оценить позу, которая минимизирует ошибки ортогональной проекции на линии видимости для последних n событий.
Пусть M k будет вектором, определяющим линию видимости события e k , координаты которого можно легко получить как:
Mk = K − 1 (uk1). (3)Далее предположим, что мы можем идентифицировать точку объекта, сгенерировавшего событие e k , которое мы обозначим индексом i ( k ).Следовательно, если бы истинная поза объекта и оценка были идеально согласованы, Vi (k) * обязательно будет находиться на линии видимости события e k .
Пусть Q i ( k ) будет проекцией Vi (k) * на линию прямой видимости события e k , что может быть вычислено как:
Qi (k) = (Vi (k) *) TMk‖Mk‖2Mk = LkVi (k) *, (4), где L k — матрица проекции в прямой видимости события e k , которая принимает значение:
Lk = MkMkTMkTMk.(5)Для данного события e k , мы определяем ошибку коллинеарности объектного пространства ξ k ( R *, T *) как:
ξk (R *, T *) = Qi (k) -Vi (k) * = (Lk-I3) Vi (k) *, (6), где I 3 обозначает единичную матрицу 3 × 3. Мы учтем последние n событий и минимизируем сумму квадратов ошибок коллинеарности, где ошибки могут быть взвешены. Поэтому целью нашего алгоритма будет минимизация следующей функции ошибок Ek (R *, T *):
Ek (R *, T *) = 1W∑j = 0n-1wj || ξk-j (R *, T *) || 2, (7), где ξk-j (R *, T *) обозначает ошибку коллинеарности события e k — j (то есть событие, происходящее на j шагов до текущего) с j = 0, 1,…, n — 1.Тогда вес соответствующей ошибки обозначается w j , проверка:
wj≥0, ∀j = 0,1,…, n-1, (8a) W = ∑j = 0n-1wj. (8b)Обычно мы устанавливаем веса w j так, чтобы они уменьшались на j , придавая большее значение самым последним событиям. Здесь W — это просто нормализующий коэффициент, значение которого обычно принимается равным 1.
.Поэтому мы будем искать позу ( R *, T *), которая минимизирует функцию ошибок, заданную уравнением (7), которая вычисляется как сумма ошибок коллинеарности для последних n События.Эти ошибки коллинеарности зависят от предполагаемого положения точки, генерирующей событие (где мы предполагаем, что мы можем идентифицировать точку) и положения соответствующего события на фокальной плоскости (или, что то же самое, проекции точки, генерирующей событие). . Следовательно, наш подход можно классифицировать как решение проблемы P n P, поскольку мы оцениваем позу объекта на основе набора пар n между трехмерными точками объекта и их проекциями на фокальную плоскость.В отличие от классических методов, основанных на кадрах, наш подход позволяет нам рассматривать несколько событий, генерируемых одной и той же точкой объекта, и, таким образом, n может быть выбрано больше, чем количество точек, соответствующих объекту.
Примечание: P n P методы всегда требуют сопоставления 3D-точек с их соответствующими 2D-проекциями. В случае нашего метода это равносильно определению того, какая точка объекта сгенерировала событие. Следовательно, наш алгоритм основан на технике отслеживания событий.В остальной части этого документа термин «отслеживание» всегда будет относиться к этому предыдущему методу. Как мы покажем в экспериментах, общая производительность системы сильно зависит от точности этого отслеживания.
2.2.4. Перевод
Для данного поворота R * оптимальный перенос, который минимизирует сумму квадратов ошибок коллинеарности, может быть вычислен в закрытой форме Lu et al. (2000). Эквивалентно, для данной оценки ( R *, T *) оптимальное смещение Δ T k может быть вычислено как:
ΔTk (R *, T *) = Ak-1Bk, (9), где A k — это матрица 3 × 3, а B k — трехмерный вектор, заданный по формуле:
Ак = ∑j = 0n-1wj (I3-Lk-j), (10) Bk = ∑j = 0n-1wj (Lk-j-I3) Vi (k-j) *.(11)Мы будем называть этот способ вычисления A k и B k полным методом . Как показано в Lu et al. (2000), A k может быть доказана как невырожденная, что гарантирует, что уравнение (9) всегда может быть решено. Затем мы обновляем оценку создания позиции:
Tk * = Tk-1 * + λTΔTk, (12), где Tk * обозначает предполагаемое перемещение в момент времени t k , а λ T — коэффициент настройки.Заметим, что λ T — величина безразмерная, и ее всегда следует выбирать меньше или равной единице. Его действие будет более тщательно изучено в ходе экспериментов.
Как показано в Приложении A в Дополнительных материалах, для правильно выбранного набора весов и при некоторых разумных предположениях можно итеративно обновлять A k и B k , что составляет:
Ak≈w0 (I3-Lk) + (1-w0) Ak-1, (13) Bk≈w0 (Lk-I3) Vi (k) * + (1-w0) Bk-1.(14)Это позволяет нам обновлять A k и B k для каждого события итеративно, экономя память и время вычислений. Мы будем называть этот способ обновления A k и B k эффективным методом и проверим его влияние на эксперименты.
2.2.5. Вращение
Как показано в Lu et al.(2000), для заданного перемещения T * оптимальное вращение R * не может быть вычислено в закрытой форме. В Lu et al. (2000) вращение получается с помощью задачи абсолютной ориентации между точками оценки и их проекциями на соответствующий луч зрения, которая затем решается с помощью разложения по сингулярным значениям. Однако это дорогостоящий в вычислительном отношении процесс, который плохо подходит для вывода нейроморфной камеры: чтобы в полной мере использовать высокую динамику сенсора, мы хотим обновлять оценочную позу с каждым входящим событием.Учитывая высокую частоту появления событий, вычисления, выполняемые с каждым из них, должны быть сведены к минимуму, чтобы достичь производительности в реальном времени.
В нашем подходе вместо того, чтобы пытаться найти оптимальное вращение для каждого события, мы просто применим вращение так, чтобы наша функция ошибок уменьшалась на каждом шаге. Поскольку события происходят с таким высоким временным разрешением, это очень быстро приведет к правильной оценке. С этой целью мы определим виртуальную механическую систему, энергия которой равна функции ошибок.Поскольку механические системы развиваются в смысле минимизации их энергии, моделирование поведения этой системы будет эквивалентно минимизации функции ошибок, приближению оценки к ее истинному значению.
Следовательно, давайте изобразим следующую виртуальную механическую систему: поскольку вращения происходят вокруг исходной точки оценки V0 *, давайте представим, что V0 * прикреплен к миру сферическим шарниром, как показано на рисунке 2B. Это позволяет объекту свободно вращаться вокруг этой точки, но предотвращает любое перемещение.Затем для каждого события e k — j с j = 0, 1,…, n — 1 (то есть для последних n событий) мы хотим притягивать соответствующую точку оценки Vi (kj) * к линии прямой видимости события. Для этого представим, что Vi (k-j) * и линия обзора связаны линейной пружиной, направление которой всегда перпендикулярно лучу зрения. Другими словами, мы связываем Vi (k-j) * и Q i ( k — j ) линейной пружиной.В реальной механической системе это может быть достигнуто путем соединения пружины и линии визирования с помощью цилиндрического шарнира, как показано на рисунке 2B.
Сила F k — j , прилагаемая линейной пружиной, определяется законом Гука, который гласит, что направление силы совпадает с направлением оси пружины, и ее величина задается выражением:
|| Fk-j || = Ck-jΔlk-j = Ck-j (lk-j-l0), (15), где C k — j — жесткость пружины, а Δ l k — j = l k — j — l 0 удлинение.Поскольку ось пружины выровнена с Qi (k-j) -Vi (k-j) *, и учитывая уравнение (6), F k — j принимает значение:
Fk-j = Ck-jξk-j || ξk-j || Δlk-j. (16)Далее, сделаем l 0 = 0. Это означает, что удлинение в состоянии покоя равно нулю. Другими словами, виртуальная пружина не будет создавать никакой силы, когда Vi (k-j) * лежит на соответствующей линии обзора, то есть когда она правильно выровнена с соответствующим событием.Относительное удлинение Δ l k — j тогда принимает значение:
Δlk-j = lk-j = || Qi (k-j) -Vi (k-j) * || = || ξk-j ||. (17)Наконец, сделаем величину жесткости равной весу соответствующего события:
, где β — это просто константа регулировки единицы, которая компенсирует тот факт, что веса безразмерны, но не жесткость. В остальной части этого документа все расстояния будут указаны в мм, поэтому β = 1 Н · мм -1 . F k — j становится:
Fk-j = βwjξk-j. (19)Напомним читателю, что энергия линейной пружины g k — j определяется выражением:
gk-j = 12Ck-j (Δlk-j) 2. (20)Энергия G k всей системы при рассмотрении последних n событий вычисляется с применением принципа суперпозиции:
Gk = ∑j = 0n-1gk-j = 12∑j = 0n-1βwj || ξk-j || 2 = βW2Ek, (21), величина которого равна функции ошибок с точностью до некоторого нормирующего коэффициента.Тогда моделирование поведения этой системы будет эквивалентно минимизации функции ошибок.
Поскольку в этом случае перенос невозможен, мы хотим вычислить только моменты сил и их влияние. Таким образом, пусть τ k — j будет крутящим моментом, создаваемым силой F k — j относительно источника оценки V0 *:
τk-j = (Vi (k-j) * — V0 *) × Fk-j = R * Vi (k-j) × βwj (Lk-j-I3) Vi (k-j) *, (22), где × обозначает перекрестное произведение.Результирующий крутящий момент Γ k с учетом последних n событий принимает значение:
Γk = ∑j = 0n-1R * Vi (k-j) × βwj (Lk-j-I3) Vi (k-j) *. (23)Мы вычислим результирующий крутящий момент, используя это выражение при применении полного метода . Затем мы аппроксимируем его эффект вращением, заданным в его представлении ось-угол вектором r k , вычисленным как:
, где λ r — коэффициент настройки.Полное обоснование этого выбора приведено в Приложении B в дополнительных материалах.
В Приложении C к дополнительным материалам мы даем некоторые дополнительные сведения о том, как выбрать значение для λ r , и получаем следующее выражение для его теоретического оптимума λropt:
λropt = 3π2 (1 + 2) 1βWρmax2, (25), где ρ max равно максимальному расстоянию в объекте ρmax = maxi {‖Vi‖}. Из этого выражения очевидно, что λ r не безразмерно, и поэтому его оптимальное значение будет зависеть от размеров объекта, позу которого мы хотим оценить (и единиц, в которых они выражаются).В оставшейся части статьи все значения λ r будут выражены в N -1 мм -1 .
Пусть Δ R k будет матрицей вращения, соответствующей повороту, представленному r k . Обновляем оценку следующим выражением:
Rk * = ΔRkRk-1 *. (26)Как и в случае A k и B k , результирующий крутящий момент может быть аппроксимирован итерационным выражением:
Γk≈βw0R * Vi (k) × (Lk-I3) Vi (k) * + (1-w0) Γk-1.(27)Значение результирующего крутящего момента будет обновлено таким образом при применении эффективного метода .
2.2.6. Глобальный алгоритм
Проблема P n P решается с помощью глобального алгоритма, описанного ниже.
3. Результаты
В этом разделе представлены два эксперимента, показывающие точность нашего метода. Алгоритм реализован на Matlab и C ++ и протестирован на синтетической сцене для первого эксперимента. Далее проводится еще один эксперимент с реальной записью.
Чтобы охарактеризовать точность нашего метода, мы рассмотрим сумму квадратов ошибок коллинеарности E k . Дополнительно мы принимаем следующие метрики в пространстве жестких движений:
• Абсолютная ошибка оценки при линейном переводе определяется как норма разницы между расчетным переводом T * и его истинным значением T . Мы определяем относительную ошибку трансляции ξ T как:
ξT (%) = 100 || T * -T |||| T¯ ||, (28)где || T¯ || — норма среднего смещения объекта за весь эксперимент.
• Расстояние d между двумя поворотами, заданное соответствующими матрицами поворота R 1 и R 2 можно вычислить как:
d (R1, R2) = || I3-R1R2T || F, (29), где I 3 — единичная матрица 3 × 3 и || · || F обозначает норму Фробениуса матрицы. Можно доказать, что это метрика в пространстве трехмерных вращений (Huynh, 2009) и принимает значения в диапазоне [0,22].Таким образом, пусть ξ R будет относительной ошибкой вращения, вычисляемой как:
ξR (%) = 100 дней (R *, R) 22. (30)Алгоритм 1 . Основанный на событиях P n P алгоритм
Для всех следующих экспериментов веса прошлых событий выбираются линейно убывающими. Наложение W = 1 дает:
wj = 2 (n-j) n (n + 1), ∀j = 0,…, n-1. (31)3.1. Синтетическая сцена
Сначала алгоритм тестируется на синтетической сцене, содержащей виртуальный объект.Этот объект состоит из 10 точек, трехмерные координаты которых были случайным образом инициализированы в соответствии с нормальным распределением с нулевым средним и стандартным отклонением, равным 10 мм. Предполагается, что и объект, и камера статичны, а положение объекта относительно камеры задается вектором перемещения T = (0, 0, 200) T (в мм) а вектор вращения r = (2∕3, 2∕3, 1∕3) T . На рисунке 3 показана результирующая геометрия.
Рис. 3. Синтетическая сцена: сплошные точки представляют позу объекта, статичного в этом эксперименте . Мы случайным образом выбираем точку объекта и генерируем событие, расположенное на его проекции на фокальную плоскость.
Виртуальная камера имеет следующую матрицу внутренних параметров:
K = (fmx0cx0fmycy001) с {f = 20 mmmx = my = 30 пикселей / mmcx = 152 pxcy = 120 пикселей, что соответствует идеальной модели камеры-обскуры. Точные геометрические параметры соответствуют параметрам устройства ATIS, оснащенного объективом с фокусным расстоянием 20 мм.
Поток событий генерируется из этой синтетической сцены, последовательно выбирая случайную точку объекта и генерируя событие в соответствующей проекции на фокальной плоскости. Времена между событиями представляют собой случайные целые числа в соответствии с нормальным распределением со средним значением 5 мкс и стандартным отклонением 2 мкс (что соответствует некоторым характерным значениям, наблюдаемым в записях ATIS реальных движущихся объектов). Отметим, однако, что мы не пытаемся точно смоделировать механизм генерации событий нейроморфных датчиков изображения.Для этого первого эксперимента мы просто пытаемся оценить алгоритм, когда объект статичен и предполагает идеальное отслеживание. Даже если события не генерируются реалистичным образом, это позволит нам охарактеризовать различные аспекты алгоритма в простейшей возможной ситуации. В следующем эксперименте мы оценим наш метод на реальных записях.
На первом этапе мы отдельно проверяем точность стратегии вращения и оценки перемещения. Это позволит нам изучить пространство параметров и дать некоторые рекомендации по их установке.
3.1.1. Перевод
Чтобы исключительно проверить, как алгоритм оценивает перемещение, мы делаем начальную оценку поворота R * (0) равной его истинному значению R . Кроме того, мы устанавливаем коэффициент настройки для поворота λ r равным нулю. Напомним читателю, что объект в этом случае статичен, и поэтому предполагаемое вращение будет оставаться равным его истинному значению в каждый момент времени. Производим первоначальную оценку перевода T * (0) = (0, 0, 0) T .
Давайте сначала применим полный метод к синтетическому потоку событий, в результате чего n = 20. На рисунке 4A показана эволюция как суммы квадратов ошибок коллинеарности E k , так и ошибки относительной трансляции. ξ T с входящими событиями для четырех различных значений λ T . Мы не строим график относительной ошибки вращения ξ R , так как в этом случае она всегда будет равна нулю.Отметим, что для первых событий n мы накапливаем информацию (обновление A k , B k и Γ k ), но мы не обновляйте оценку позы. Следовательно, относительная ошибка перевода остается стабильной. E k нестабильно, потому что, как правило, разные точки объекта приводят к разным ошибкам коллинеарности.После n событий мы начинаем обновлять оценку и видим, как обе ошибки уменьшаются до нуля.
Рисунок 4. (A) Эволюция суммы квадратов ошибок коллинеарности E k и относительной ошибки трансляции ξ T с количеством итераций для четырех различных значений λ T , при применении полного метода с n = 20. Чем больше λ T , тем быстрее сходимость. (B) Эволюция E k и ξ T для четырех значений n при λ T = 0,1. Мы не начинаем обновлять оценку, пока не накопим n событий. После этого поведение системы очень похоже для каждого значения n .
Сравнивая результаты, полученные с разными значениями λ T , мы убеждаемся, что чем больше λ T , тем быстрее сходимость.Фактически, мы могли бы рассмотреть вопрос о том, чтобы сделать λ T = 1. Это значение λ T делает расчетное преобразование равным оптимальному для последних n событий на каждой итерации. Если мы достаточно уверены в точности нашего отслеживания, это приемлемая стратегия.
На рисунке 4B показана эволюция E k и ξ T для четырех различных значений n , с λ T = 0.1. Мы можем видеть, что оценка не обновляется до тех пор, пока не истечет n событий, но как только это произойдет, поведение системы очень похоже для всех значений n . Это можно объяснить тем, что объект в данном случае статичен и отслеживание идеальное. В реальных сценариях выбор n потребует компромисса между приемлемыми скоростями объекта (меньшее значение n приводит к более короткому времени реакции) и стабильностью при наличии ошибок отслеживания — если n достаточно велико, мы можем ожидайте, что ошибки отслеживания будут отменены.Чтобы проиллюстрировать этот момент, давайте смоделируем некоторую неточность в отслеживании и снова оценим алгоритм.
С этой целью мы предположим, что события правильно назначены точкам, их генерирующим, но их положение зашумлено. Это соответствует реальному случаю, когда мы оцениваем положение некоторых маркеров, но в этой оценке есть некоторая неточность. Мы будем моделировать ошибки слежения как гауссовский шум с нулевым средним и стандартным отклонением, равным σ.На рисунке 5A мы построили график эволюции относительной ошибки трансляции ξ T для четырех различных значений σ (в пикселях) и n . Мы проверяем, что неточное отслеживание сильно снижает производительность нашего алгоритма, что приводит к увеличению значений окончательной ошибки. Кроме того, для малых значений n расчетная поза имеет большее отклонение по мере роста неточности.
Рис. 5. (A) Эволюция относительной ошибки трансляции ξ T , когда отслеживание не совсем точное.По мере роста погрешности σ результаты оценки позы сильно ухудшаются. Кроме того, когда n мало, предполагаемая поза имеет большую дисперсию. (B) Эволюция ξ T с различным процентом ошибочно назначенных событий.
Затем мы оцениваем влияние ошибок сопоставления, т.е. когда события неправильно назначаются точке объекта, который их генерирует. Таким образом, мы берем процент событий и случайным образом относим их к какой-то другой точке объекта.На рисунке 5B показано изменение относительной ошибки трансляции ξ T для четырех различных процентов ошибочно назначенных событий. Опять же, мы наблюдаем, что ошибки сопоставления ухудшают производительность алгоритма.
Эти результаты позволяют нам сделать вывод, что общая производительность системы сильно зависит от точности отслеживания. Кроме того, мы заключаем, что n следует выбирать достаточно большим, чтобы гарантировать стабильность при наличии ошибок отслеживания.Влияние этого параметра будет более глубоко проанализировано в следующем эксперименте при работе с реальными записями. Отметим, что увеличение n также приведет к увеличению времени вычислений.
Затем давайте оценим трансляцию, применив эффективный метод к синтетическому потоку событий. На рисунке 6A показана эволюция E k и ξ T для четырех различных значений λ T , когда w 0 = 0.1. Отметим, что при применении этой стратегии мы не устанавливаем значение n , и поэтому мы начнем обновление оценки с первого входящего события. Как видно на рисунке 6A, обе ошибки в этом случае также уменьшаются до нуля, и сходимость происходит быстрее при больших значениях λ T . Однако при применении эффективного метода большие значения λ T вызовут колебания системы. Выбор λ T , следовательно, потребует компромисса между скоростью сходимости и стабильностью системы.
Рисунок 6. (A) Эволюция E k и ξ T с количеством итераций для четырех различных значений λ T , с w 0 = 0,1. Чем больше λ T , тем быстрее сходимость. Однако слишком большое значение λ T вызовет колебания системы. (B) Эволюция E k и ξ T для четырех различных значений w 0 , с λ T = 0.03. Большие значения w 0 делают систему более стабильной.
На рисунке 6B показана эволюция E k и ξ T для четырех различных значений w 0 , при применении эффективного метода с λ T = 0,03 . Мы видим, что система имеет тенденцию к колебаниям при малых значениях w 0 . Это можно объяснить тем, что небольшие значения w 0 приводят к большой «инерции» системы.Напомним читателю, что мы итеративно обновляем желаемое смещение Δ T на каждом шаге. Параметр w 0 определяет, насколько мы обновляем Δ T при каждом входящем событии. Следовательно, если w 0 слишком мало, желаемое смещение будет оставаться большим, даже когда ошибки коллинеарности уже малы.
Чтобы прояснить этот момент, давайте изобразим на рисунке 7 эволюцию относительной ошибки трансляции ξ T для различных значений w 0 и λ T .Как мы видим, для малых значений w 0 система имеет тенденцию к колебаниям, даже когда λ T мало. Этот результат предполагает, что следует присвоить большие значения w 0 (близко к единице) и λ T , что позволит достичь быстрой сходимости при сохранении стабильности системы. Однако, если значение w 0 слишком велико, мы будем придавать большое значение самым последним событиям. Фактически это эквивалентно установке небольшого значения для n , что приведет к снижению стабильности системы при наличии ошибок отслеживания.
Рисунок 7. Эволюция относительной ошибки трансляции ξ T с входящими событиями для различных значений w 0 и λ T . Мы проверяем, что большие значения w 0 позволяют нам установить большее значение λ T без потери стабильности. Однако система станет более чувствительной к отслеживанию ошибок.
Мы заключаем, что при применении эффективного метода w 0 и λ T следует выбирать вместе. Поэтому мы рекомендуем значения w 0 от 0,03 до 0,3, для λ T от 0,01 до 0,1. В этом случае значение w 0 не влияет на необходимое время вычислений.
3.1.2. Вращение
Далее мы проверим, как алгоритм оценивает только вращение.С этой целью мы делаем начальную оценку смещения T * (0) равной его истинному значению T и устанавливаем λ T = 0. Начальная оценка вращения равна сделал Ro * (0) = I3, единичную матрицу 3 × 3.
Максимальное расстояние в синтетическом объекте составляет ρ max = 19,95 мм. Применение уравнения (25) дает:
λropt = 0,0049 Н − 1 мм − 1≈0,005 Н − 1 мм − 1. (32)Мы протестируем различные значения λ r вокруг λropt.На рисунке 8A показана эволюция E k и ξ R с входящими событиями для четырех различных значений λ r , при применении полного метода с n = 20 Мы проверяем, что результаты очень похожи на результаты, полученные в случае трансляции, причем обе ошибки уменьшаются до нуля после n событий. Аналогично, сходимость быстрее при больших значениях λ r .Убедимся, что система по-прежнему дает стабильные результаты при λr> λropt. В этом случае мы экспериментально определяем, что при значениях λ r больше 0,01 поворот не может сходиться. Мы проверяем, что уравнение (25) дает хорошее теоретическое руководство для установки порядка величины λ r . Поэтому мы рекомендуем просто установить значение λ r как λropt.
Рисунок 8. (A) Эволюция ошибок для четырех различных значений λ r (в N −1 мм −1 ), когда n = 20.После n событий обе ошибки затухают к нулю, сходимость быстрее при больших значениях λ r . (B) Эволюция ошибок для четырех различных значений n , с λ r = 0,005 (в N -1 мм -1 ). По истечении n событий поведение системы очень похоже для всех значений n .
На рисунке 8B показана эволюция E k и ξ R с входящими событиями для четырех различных значений n , когда λr = λropt = 0.005 N −1 мм −1 . Как и в случае трансляции, после того, как прошло n событий, обе ошибки уменьшаются до нуля. Опять же, поскольку объект статичен и отслеживание идеальное, поведение системы очень похоже для всех значений n . Для неточного отслеживания применяется тот же компромисс, что и в случае перевода, и мы рекомендуем значения n между 20 и 200.
Наконец, применим эффективный метод для оценки вращения.На рисунке 9A показана эволюция E k и ξ T для четырех различных значений λ r , когда w 0 = 0,1. Мы проверяем, что при применении эффективного метода система имеет большую тенденцию к колебаниям.
Рис. 9. (A) Эволюция E k и ξ R для четырех различных значений λ r , когда w 0 = 0.1. При больших значениях λ r система имеет тенденцию к колебаниям и даже может не сойтись. (B) Развитие ошибок при λ r = 0,001 Н −1 мм −1 для четырех различных значений w 0 . Когда w 0 мало, система имеет большую тенденцию к колебаниям.
На рисунке 9B показана эволюция ошибок для четырех различных значений w 0 , когда λ r = 0.002 N -1 мм -1 . Как и в случае с трансляцией, мы проверяем, что небольшие значения w 0 вызывают колебания системы. Аналогично, слишком большое значение w 0 заставит систему быть чувствительной к ошибкам отслеживания. Следовательно, мы рекомендуем ту же вилку значений для w 0 между 0,03 и 0,3.
3.2. Реальные записи
Далее наш алгоритм тестируется на реальных данных, полученных от датчика ATIS, где объект движется и вращается перед камерой.В качестве объекта мы используем белый лист бумаги, на котором мы напечатали логотип и набор черных точек (см. Рисунок 10A). Эти точки составляют модель объекта.
Рис. 10. (A) Реальный объект, использованный в экспериментах: черные точки составляют модель объекта, а логотип в центре используется только для визуальной проверки. (B) Выходные данные набора Spring-Linked Tracker Set : кружки показывают положение простых трекеров, а пунктирные линии представляют соединяющие их пружины. (C) 3-точечный объект (D) 4-точечный объект (E) 8-точечный объект.
Чтобы определить, какая точка объекта сгенерировала событие, мы отслеживаем эти точки с помощью набора Spring-Linked Tracker Set, представленного в Reverter Valeiras et al. (2015). Эта работа знакомит с техникой отслеживания на основе плоских деталей, которая описывает объект как набор простых трекеров, связанных пружинами. Когда позиция входящего события достаточно близка к одному из этих простых трекеров, тогда событие назначается этому трекеру, чье 2D-местоположение обновляется.Таким образом, пружины гарантируют, что форма объекта сохраняет определенную согласованность, в то время как допускается некоторая изменчивость, соответствующая трансформации перспективы движущегося объекта. При отслеживании сетки точек средние ошибки отслеживания, указанные в Reverter Valeiras et al. (2015) ниже 3% по отношению к размеру объекта. Это соответствует для объекта, занимающего треть поля зрения камеры, абсолютной ошибке отслеживания в 3 пикселя. Исходя из результатов, показанных на рисунке 5, мы считаем это значение приемлемым.
На рис. 10В показан результат работы набора Spring-Linked Tracker Set , когда он применяется к одной из наших записей. На изображении кружки представляют положение каждого из простых трекеров, а пунктирные линии изображают соединяющие их пружины. Как мы видим, мы связываем простой трекер с каждой из черных точек. Таким образом, когда событие назначается одному из этих трекеров, мы считаем, что событие было сгенерировано соответствующей точкой объекта. Чтобы повысить точность метода, мы делаем местоположение события равным текущему положению трекера, а затем передаем результирующий поток кластеризованных событий нашему алгоритму P n P.
Основные истинные значения для числовой оценки получены из системы OptiTracksystem. OptiTrack — это система захвата движения, которая выводит надежные значения для трехмерной позы твердых тел при условии, что они оснащены рядом инфракрасных маркеров. Установка маркеров на объекте и камере позволяет нам получить их позы в трехмерном пространстве, из которого мы извлекаем позу объекта относительно камеры. Сравнивая это значение с оценкой нашего алгоритма, мы вычисляем относительные ошибки сдвига и вращения.Точность характеризуется средним значением этих ошибок, вычисленным для всей записи.
Мы рассматриваем три разных объекта: состоящие из трех, четырех или восьми точек (см. Рисунки 10C – E соответственно). Это позволит нам оценить влияние количества баллов на точность алгоритма. Для всех трех объектов максимальное расстояние составляет ρ max = 136,01 мм. Применение уравнения (25) дает λropt≈0,0001 Н −1 мм −1 .
Мы делаем три разных записи для каждого из объектов, всего девять записей.Мы идентифицируем их по их индексу от одного до девяти, где записи с №01 по №03 соответствуют сценам, содержащим трехточечный объект. Записи с # 04 по # 06 содержат объект с 4 точками, а с # 07 по # 09 — объект с 8 точками. Во всех них соответствующий объект смещается и вращается во всех направлениях. Все записи обрезаются до одинаковой продолжительности 25 с и решаются с использованием одного и того же набора параметров. Первоначальная оценка позы всегда производится T * = (0, 0, 0) T , R * (0) = I3.
Мы проверяем точность как полного метода , так и эффективного метода на этих реальных данных. Кроме того, мы применяем метод Лу (Lu et al., 2000) и применяем его к нашим записям. Это позволяет нам сравнить наш подход с современным алгоритмом P n P.
Давайте сначала применим полный метод к 9 записям. Параметры выбираются из диапазона, дающего стабильные результаты в предыдущем эксперименте. После нескольких испытаний они экспериментально установлены на n = 50, λ T = 0.1 и λ r = 0,0001 Н −1 мм −1 . На рисунке 11A показан выходной сигнал алгоритма P n P в данный момент времени, соответствующий записи № 09. Здесь фон изображения показывает снимок выходных данных ATIS. Кроме того, события, назначенные разным точкам объекта, обозначаются разными формами (кресты, треугольники и т. Д.), А круги представляют собой повторное проецирование объекта в позе, оцененной алгоритмом.Мы можем видеть, что в целом кружки окружают события, генерируемые соответствующими точками, показывая, что наш метод дает хорошие результаты в фокальной плоскости. Мы также перепроектируем логотип, который, как мы видим, соответствует соответствующим событиям. На рисунке 11B показано состояние системы в тот же момент, представленное в трехмерном пространстве, где оптический центр камеры находится в начале координат. Также были нанесены недавние траектории точек объекта, представленные тем же набором символов, что и на 2D-изображении.На видео 1 мы показываем результат работы алгоритма для этой записи: слева мы показываем результаты, полученные в фокальной плоскости, а результаты 3D показаны справа.
Рисунок 11. (A) Характеристический выходной сигнал алгоритма P n P, соответствующий записи № 09. Фон изображения представляет собой снимок записи ATIS, а события, назначенные разным точкам объекта, представлены разными формами (кресты, треугольники и т. Д.).Круги указывают на повторное проецирование объекта в его предполагаемой позе: как мы видим, повторное проецирование соответствует соответствующим событиям, показывая, что алгоритм дает хорошие результаты в фокальной плоскости. Мы также перепроектируем логотип, соответствующий соответствующим событиям. (B) Трехмерное представление того же момента, где недавние траектории точек объекта были нанесены с использованием того же набора символов.
Чтобы проиллюстрировать результаты оценки позы, полученные с помощью алгоритма, давайте изобразим на рисунке 12A эволюцию трех компонентов вектора перемещения T (в мм) для записи №09.На рисунке основные истинные значения представлены пунктирными линиями, а оценочные значения — сплошными линиями. Мы проверяем совпадение этих кривых, показывая, что алгоритм правильно оценивает перевод. Относительная ошибка трансляции ξ T показана внизу рисунка: как мы видим, после короткого начального переходного процесса ее значение стабилизируется и всегда остается ниже 5%. Это приводит к тому, что среднее значение для всей записи составляет всего 1,79%. Мы обозначаем эту среднюю ошибку ξT¯ и используем ее для характеристики точности данного подхода.
Рис. 12. (A) Эволюция трех компонентов вектора трансляции T (в мм) для записи №09. Основные истинные значения показаны пунктирными линиями, а результаты, полученные с помощью полного метода , представлены сплошными линиями. Убедимся, что эти две кривые совпадают. Результирующее значение относительной ошибки трансляции ξ T показано внизу: после короткого начального переходного процесса ее значение всегда остается ниже 5%, что дает среднее значение для всей записи всего 1.79%. (B) Эволюция вектора вращения r : расчетные значения совпадают с основными истинными значениями. Это приводит к среднему значению относительной погрешности вращения 0,79%.
Аналогично, на рисунке 12B показаны три составляющие вектора вращения r . Как и в случае с переводом, оценочные значения совпадают с исходными справочными данными, предоставленными системой OptiTrack. Следовательно, ошибка относительного вращения ξ R всегда ниже 5%, в результате чего среднее значение (обозначенное ξR¯) составляет всего 0.79%. Эти результаты позволяют нам сделать вывод, что полный метод правильно оценивает позу объекта для этой записи.
Теперь применим эффективный метод ко всем записям со следующим набором параметров: w 0 = 0,1, λ T = 0,1 и λ r = 0,0001 N — 1 мм −1 (обратите внимание, что λ T и λ r принимают те же значения, что и для полного метода ).Рассматривая алгоритм Лу, единственный параметр — n , который мы экспериментально установили равным n = 50. Мы показываем на рисунке 13 средние ошибки, полученные для каждой записи всеми тремя методами, где относительная ошибка перевода показана вверху и относительная ошибка вращения внизу. Записи одного и того же объекта группируются. Из результатов, представленных на Рисунке 13, мы можем сделать следующие выводы:
• Полный метод и эффективный метод дают статистически эквивалентные результаты: для каждой записи результаты, полученные обоими методами, практически идентичны.Это доказывает, что эффективный метод является ценным приближением.
• Мы не можем однозначно оценить позу объекта с менее чем четырьмя точками: когда рассматривается трехточечный объект, каждый метод не дает точных оценок позы. Это известное ограничение метода P n P (Haralick et al., 1994), не специфичное для подхода, основанного на событиях.
• Когда учитываются четыре или восемь баллов, поза правильно оценивается нашим алгоритмом.Результаты, полученные с помощью нашего метода, столь же надежны, как и результаты, предоставленные Лу, что свидетельствует о точности нашего подхода. И эффективный метод , и полный метод дают ошибки в одном и том же диапазоне значений: от 1,9% до 2,8% для перевода и от 0,8 до 1,2% в случае вращения.
• Увеличение количества точек до более чем четырех не улучшает точность алгоритма в экспериментах. Более четырех точек создают переопределенную систему, что не всегда является гарантией большей точности при оценке позы.Мы предполагаем, что в данном конкретном случае мы достигли предела алгоритма из-за пространственного разрешения сенсора. Чтобы прийти к окончательному выводу, необходимо более тщательное изучение с различными стимулами, условиями эксперимента и методами отслеживания.
Рисунок 13. Статистика ошибок, полученных для каждой из девяти записей . Полный метод и эффективный метод дают эквивалентные результаты. Когда рассматриваются четыре или восемь точек, точность нашего алгоритма эквивалентна точности Лю.
Таким образом, когда объект состоит как минимум из четырех точек, все три метода обеспечивают сопоставимую точность. Чтобы провести полное сравнение между ними, мы затем оценим время их вычислений.
3.3. Время вычисления
Представленные эксперименты проводились с использованием обычного ноутбука, оснащенного процессором Intel Core i7 и работающего под управлением Debian Linux. Алгоритм реализован как на Matlab, так и на C ++. Обсуждается только время вычисления реализации C ++.Код не распараллеливался, использовалось одно ядро.
При применении полного метода или метода Лу время вычисления зависит от значения n (количество прошлых событий, учитываемых при обновлении позы). Таким образом, мы оцениваем эволюцию как времени вычислений, так и ошибок позы со значением этого параметра. На рисунке 14 показаны результаты, полученные для записей № 01, № 04 и № 07, где n принимает значения от 2 до 30.Для наглядности показаны только три записи, результаты, полученные для остальных записей, эквивалентны.
Рисунок 14. Эволюция ошибок оценки позы и время вычисления со значением n . (A) Результат для записи # 01. Вверху: средняя ошибка перевода. Метод Лу нестабилен для малых значений n , и его поведение не предсказуемо до n = 15. Среднее: ошибка среднего вращения.Поскольку эта запись содержит трехточечный объект, невозможно правильно оценить вращение, и ошибки вращения принимают большие значения для всех трех методов. Внизу: время вычисления. Эффективный метод — самый быстрый, и он не зависит от n . (B) Результат для записи # 02. В этом случае можно правильно оценить вращение. Время вычисления больше, чем для записи № 01, потому что большее количество точек в объекте подразумевает большее количество событий для обработки. (C) Результат для записи # 07.
На рисунке 14A показаны результаты, полученные для записи № 01, которая содержит трехточечный объект. Вверху показана эволюция средней ошибки трансляции ξT¯ со значением n . Если мы проанализируем эффективный метод , мы увидим, что получается прямая линия. Это ожидаемый результат, поскольку этот метод не зависит от n . Значение ошибки ξT¯ = 2,95%.
В случае полного метода мы видим, что большие ошибки получаются для малых значений n .Это также ожидаемый результат, как объясняется в разделе 3.1. Начиная с n = 6 ошибка стабилизируется на уровне около 3%.
Наконец, применяя метод Лу, мы проверяем, что ошибки еще выше для малых значений n , и они не стабилизируются до тех пор, пока n = 15. Это можно объяснить тем, что метод Лу не является инкрементальным. Вместо этого на каждой итерации он вычисляет лучшее решение для последних n событий. Из-за природы нейроморфной камеры часто случается, что несколько последовательных событий генерируются одной и той же точкой объекта.Следовательно, когда метод Лу применяется с небольшим значением n , поза часто оценивается с использованием только одной или двух точек объекта. Это приводит к ошибкам в оценке, что приводит к большим колебаниям, которые приводят к большим наблюдаемым ошибкам. Это указывает на то, что алгоритм Лу не подходит для вывода нейроморфной камеры.
В средней строке рисунка 14A показаны средние ошибки вращения для записи № 01. Поскольку в данном случае рассматривается 3-точечный объект, вращение нельзя однозначно оценить.Это приводит к большим ошибкам вращения для всех трех методов.
В нижней части рисунка 14A показано время вычисления, необходимое для применения алгоритма P n P к записи № 01. Значения усредняются по 10 испытаниям для каждого набора параметров. Для эффективного метода мы наблюдаем прямую линию при значении 0,017 с. В случае полного метода мы проверяем, что время вычисления линейно растет с n . Если мы проанализируем метод Лу, мы убедимся, что он также растет с n , линейно с n = 8.
Мы рассматриваем время вычисления при n = 30 как эталон, так как это значение обеспечивает стабильные решения для всех записей с каждым методом. Таким образом, эффективный метод в 6,1 раза быстрее, чем полный метод , и в 57,5 раз быстрее, чем метод Лу.
На рисунке 14B показаны результаты, полученные для записи № 04, содержащей 4-точечный объект. В этом случае вращения можно правильно оценить, эффективный метод дает среднюю ошибку вращения ξR¯ = 0.89%. Полный метод и метод Лу стабилизируются вокруг этого значения от n = 6 и n = 30, соответственно. Как отмечалось ранее, небольшие значения n вызывают колебания раствора, особенно в случае метода Лу.
В нижней части рисунка 14B показано время вычисления, необходимое для решения записи №04. Мы проверяем, что он следует той же ранее наблюдаемой схеме. Однако время вычислений для каждого метода больше, поскольку учет большего количества точек подразумевает большее количество событий для обработки.Время вычисления для эффективного метода составляет 0,035 с. Это в 6,0 раз быстрее, чем полный метод и в 58,4 раза быстрее, чем метод Лу (с n = 30).
На рис. 14C показаны результаты для записи № 07, содержащей 8-точечный объект. Поза может быть правильно оценена из n = 4 при применении полного метода и из n = 15 при выборе метода Лу. Когда n = 30, эффективный метод равен 5.В 5 раз быстрее, чем полный метод и в 52,4 раза быстрее, чем у Лу.
Важно подчеркнуть, что эти результаты зависят от реализации. Можно применить несколько методов оптимизации, обеспечивающих более быстрое время вычислений. Однако наша реализация показывает, что эффективный метод примерно в 50 раз быстрее, чем метод Лу.
4. Обсуждение
Представлен алгоритм P n P, основанный на событиях. Насколько нам известно, это первое чисто событийное решение проблемы P n P.
При вычислении оптимального перемещения объекта мы адаптируем уже существующее решение в закрытой форме к нашему инкрементному подходу. Однако поворот не может быть решен таким простым способом. Предыдущие решения использовали сложные методы для вычисления оптимального поворота для каждого кадра, применяя SVD для решения сложных систем уравнений. В нашей работе вращение оценивается путем моделирования эволюции виртуальной механической системы. Это приводит к простому, но надежному решению проблемы, показывающему, как видение, основанное на событиях, может упростить задачи оценки позы.Мы показываем, как высокое временное разрешение входящих событий позволяет применять упрощающие предположения без ухудшения получаемых результатов, но значительно сокращая количество операций на событие. В качестве дополнительного преимущества мы считаем наш алгоритм более интуитивным и простым в реализации, чем алгоритм Лу. Как недостаток, он требует настройки трех параметров, в то время как метод Лу имеет только один. Однако мы доказываем, что существует большой диапазон значений, для которых наш метод дает стабильные и точные результаты.
При применении эффективного метода получаются очень простые уравнения. Тем не менее, мы доказываем, что это приближение дает результаты, эквивалентные полному методу при работе с реальными записями движущихся объектов. Для выбранного набора параметров, когда объект состоит как минимум из четырех точек, эффективный метод и полный метод дают ошибки в одном и том же диапазоне значений: от 1,9 до 2,8% для перевода, от 0.8 и 1,2% за поворот. Эти значения, очень похожие на значения, полученные с помощью алгоритма Лу, достаточно низкие, чтобы сделать вывод о том, что наш метод может правильно оценить трехмерную позу с меньшими затратами.
Когда анализируется время вычисления различных подходов, мы показываем, что эффективный метод быстрее, чем полный метод , и намного быстрее, чем алгоритм Лу, но при этом одинаково точен. Для нашей точной реализации эффективный метод примерно в пять раз быстрее, чем полный метод и в 50 раз быстрее, чем алгоритм Лу.Даже если мы знаем, что эти результаты зависят от реализации, мы считаем разницу достаточно значительной, чтобы сделать вывод, что эффективный метод быстрее, и поэтому рекомендуем его в качестве стандартного выбора. Мы утверждаем, что это повышение эффективности связано с тем, что наш метод специально адаптирован для обработки выходных сигналов нейроморфных камер.
Как и любой другой метод P n P, наш метод требует сопоставления трехмерных точек с их двухмерными проекциями на фокальную плоскость.Следовательно, точность согласования оказывает сильное влияние на общую производительность системы, и основанный на событиях алгоритм P n P выиграет от любых достижений в области отслеживания событий или обнаружения маркеров. По этой причине в будущих исследованиях необходимо приложить усилия для улучшения этого слоя. Дальнейшие расширения этого исследования могут также включать улучшение механической модели. Например, добавление дашпотов может позволить использовать более агрессивные константы, что приведет к более быстрому времени отклика, избегая при этом колебаний.Однако более сложные модели, вероятно, увеличат вычислительные нагрузки, уменьшив их способность удовлетворять ограничениям в реальном времени: в этом аспекте следует найти компромисс.
Даже с учетом ранее упомянутых резервов и в соответствии со свойствами техники, представленной в этой работе, мы имеем здесь наиболее продвинутый, полностью основанный на событиях алгоритм P n P, предназначенный для кремниевых сетчаток. Поскольку расчетная поза обновляется с каждым событием, метод в полной мере использует высокое временное разрешение нейроморфного датчика.Кроме того, сокращается количество операций, выполняемых с каждым событием, что гарантирует производительность в реальном времени. Такое свойство очень востребовано в задачах встроенной робототехники, таких как визуальное сервоуправление или автономная навигация. Это было основной мотивацией данной работы и обеспечивает первый этап полностью событийной формулировки визуального сервоуправления на основе кремниевых сетчаток.
Взносы авторов
DR формализовал теорию и реализовал метод. DR и SK разработали и провели эксперименты.DR, SK, SI и RB проанализировали данные. DR подготовил цифры и написал статью. Все авторы рецензировали рукопись.
Финансирование
Эта работа получила финансовую поддержку от LABEX LIFESENSES [ANR-10-LABX-65], которая управляется французскими государственными фондами (ANR) в рамках программы Investissements d’Avenir [ANR-11-IDEX-0004-02]. Эта работа получила финансовую поддержку от проекта ЕС [644096-ECOMODE].
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Дополнительные материалы
Дополнительные материалы к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/article/10.3389/fnins.2016.00208
Сноски
Список литературы
Боахен, К. (2000). Двухточечная связь между нейроморфными чипами с использованием адресных событий. IEEE Trans. Circuits Syst. II 47, 416–434. DOI: 10.1109 / 82.842110
CrossRef Полный текст | Google Scholar
Чонг, Э. К.П., и Зак, С. Х. (2001). Введение в оптимизацию . Нью-Йорк, штат Нью-Йорк: Wiley.
Google Scholar
Clady, X., Clercq, C., Ieng, S.-H., Houseini, F., Randazzo, M., Natale, L., et al. (2014). Асинхронное визуальное время контакта на основе событий. Фронт. Neurosci. 8: 9. DOI: 10.3389 / fnins.2014.00009
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Кокстер, Х. С. М. (1961). Введение в геометрию . Нью-Йорк, штат Нью-Йорк: Wiley.
Google Scholar
Delbrück, T. (1993). Кремниевая сетчатка с корреляционными пикселями, настроенными по скорости. IEEE Trans. Neural Netw. 4, 529–541.
PubMed Аннотация | Google Scholar
Дельбрюк, Т., Линарес-Барранко, Б., Кулурчелло, Э., и Пош, К. (2010). «Управляемые действиями датчики технического зрения, основанные на событиях», в Трудах Международного симпозиума IEEE по схемам и системам (ISCAS) 2010 г. (Париж: IEEE), 2426–2429.
Google Scholar
Дементон, Д.Ф., и Дэвис, Л. С. (1995). Поза объекта на основе модели в 25 строках кода. Int. J. Comput. Vis. 15, 123–141.
Google Scholar
Этьен-Каммингс, Р., Ван дер Шпигель, Дж., И Мюллер, П. (1997). Датчик визуального измерения движения в фокальной плоскости. IEEE Trans. Circuits Syst. I 44, 55–66.
Google Scholar
Фишлер М.А. и Боллес Р.С. (1981). Консенсус случайной выборки: парадигма для подгонки модели с приложениями для анализа изображений и автоматизированной картографии. Commun. ACM 24, 381–395.
Google Scholar
Харалик, Б. М., Ли, К.-Н., Оттенберг, К., и Нелле, М. (1994). Обзор и анализ решений задачи оценки трехточечной перспективы позы. Int. J. Comput. Vis. 13, 331–356.
Google Scholar
Хартли Р., Зиссерман А. (2003). Многоканальная геометрия в компьютерном зрении . Кембридж, Великобритания: Издательство Кембриджского университета.
Google Scholar
Huynh, D.Q. (2009). Метрики для трехмерных вращений: сравнение и анализ. J. Math. Imaging Vis. 35, 155–164. DOI: 10.1007 / s10851-009-0161-2
CrossRef Полный текст | Google Scholar
Краммер Дж. И Кох К. (1997). Импульсные аналоговые датчики скорости СБИС. IEEE Trans. Circuits Syst. II 44, 86–101.
Google Scholar
Лагорс, X., Мейер, К., Йенг, С.-Х., Филлиат, Д., и Беносман, Р. (2014). Асинхронный многоядерный алгоритм на основе событий для высокоскоростного отслеживания визуальных функций. IEEE Trans. Neural Netw. Учиться. Syst. 26, 1710–1720. DOI: 10.1109 / TNNLS.2014.2352401
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Лепет В., Морено-Ногер Ф. и Фуа П. (2008). EPnP: точное O (n) решение проблемы PnP. Int. J. Comput. Vis. 81, 155–166. DOI: 10.1007 / s11263-008-0152-6
CrossRef Полный текст | Google Scholar
Lichtsteiner, P., Posch, C., and Delbrück, T. (2008). Асинхронный датчик временного контраста 128 128 × 128 120 дБ с задержкой 15 мкс. IEEE J. Твердотельные схемы 43, 566–576. DOI: 10.1109 / JSSC.2007.7
CrossRef Полный текст | Google Scholar
Лу, К.-П., Хагер, Г., и Мьолснесс, Э. (2000). Быстрая и глобально сходящаяся оценка позы по видеоизображениям. IEEE Trans. Pattern Anal. Мах. Intell. 22, 610–622. DOI: 10.1109 / 34.862199
CrossRef Полный текст | Google Scholar
Маховальд, М. (1992). Аналоги СБИС нейронной визуальной обработки: синтез формы и функции .Кандидатская диссертация, Калифорнийский технологический институт.
Черногория Кампос, М., и де Соуза Коэльо, Л. (1999). «Автономная дирижабль с использованием визуального отслеживания и оценки позы», в Трудах Международной конференции IEEE 1999 г. по робототехнике и автоматизации Vol. 4 (Детройт, Мичиган: IEEE), 2584–2589.
Google Scholar
Мюррей Р. М., Ли З. и Састри С. С. (1994). Математическое введение в манипуляции роботами . Бока-Ратон, Флорида: CRC Press.
Google Scholar
Ни, З., Йенг, С., Пош, К., Ренье, С., Беносман, Р. (2014). Визуальное отслеживание с помощью нейроморфных асинхронных камер, основанных на событиях. Neural Comput. 27, 925–953. DOI: 10.1162 / NECO_a_00720
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Пош К., Матолин Д. и Вольгенаннт Р. (2008). «Асинхронный датчик изображения, основанный на времени», в Proceedings of the IEEE International Symposium on Circuits and Systems (Seattle, WA: IEEE), 2130–2133.
Google Scholar
Пош, К., Матолин, Д., и Вольгенанн, Р. (2011). ШИМ-датчик изображения QVGA с динамическим диапазоном 143 дБ, без кадров, со сжатием видео на уровне пикселей без потерь и CDS во временной области. IEEE J. Твердотельные схемы 46, 259–275. DOI: 10.1109 / JSSC.2010.2085952
CrossRef Полный текст | Google Scholar
Пош, К., Серрано-Готарредона, Т., Линарес-Барранко, Б., и Дельбрук, Т. (2014). Ретиноморфные датчики зрения, основанные на событиях: камеры с биоинспирированием с пиковым выходным сигналом. Proc. IEEE 102, 1470–1484. DOI: 10.1109 / JPROC.2014.2346153
CrossRef Полный текст | Google Scholar
Ревертер Валейрас, Д., Лагорс, X., Клэди, X., Бартолоцци, К., Йенг, С.-Х., и Беносман, Р. (2015). Асинхронное нейроморфное отслеживание формы на основе визуальных частей, управляемое событиями. IEEE Trans. Neural Netw. Учиться. Syst. 26, 3045–3059. DOI: 10.1109 / TNNLS.2015.2401834
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Скрыпник, И., и Лоу, Д. (2004). «Моделирование, распознавание и отслеживание сцен с неизменными функциями изображения», на Третьем международном симпозиуме IEEE и ACM по смешанной и дополненной реальности. ISMAR 2004 (Арлингтон, Вирджиния: IEEE), 110–119.
Объяснение перспективы и точек
Perspective- n -Point [1] — это проблема оценки позы откалиброванной камеры по набору трехмерных точек мира и их соответствующих 2D-проекций на изображении.Поза камеры состоит из 6 степеней свободы (DOF), которые состоят из вращения (крен, тангаж и рыскание) и трехмерного перемещения камеры по отношению к миру. Эта проблема возникает из-за калибровки камеры и имеет множество приложений в компьютерном зрении и других областях, включая оценку позы в 3D, робототехнику и дополненную реальность. [2] Обычно используемое решение проблемы существует для P3P, и многие решения доступны для общего случая. Решение для существует, если ориентации элементов доступны в двух точках. [3] Реализации этих решений также доступны в виде программного обеспечения с открытым исходным кодом.
Спецификация проблемы
Определение
Учитывая набор трехмерных точек в мировой системе отсчета и соответствующие им проекции двухмерных изображений, а также откалиброванные внутренние параметры камеры, определите позу камеры с шестью степенями свободы в форме ее вращения и перемещения по отношению к миру. Это соответствует модели перспективной проекции для камер:
.где
style p w = \ begin {bmatrix} x и y и z и 1 \ end {bmatrix} T
— однородная мировая точка, стильp c = \ begin {bmatrix} u & v & 1 \ end {bmatrix} T
— соответствующая точка однородного изображения, — матрица собственных параметров камеры, (где а также масштабированные фокусные расстояния, — параметр перекоса, который иногда принимается равным 0, и это основная точка), — масштабный коэффициент для точки изображения, а а также — желаемое трехмерное вращение и трехмерное перемещение камеры (внешние параметры), которые вычисляются.Это приводит к следующему уравнению для модели:s \ begin {bmatrix} u \\ v \\ 1 \ end {bmatrix} = \ begin {bmatrix} f x и \ гамма и u 0 \\ 0 и f y и v 0 \\ 0 и 0 и 1 \ end {bmatrix} \ begin {bmatrix} r 11 и r 12 и r 13 и t 1 \\ r 21 и r 22 и r 23 и t 2 \\ r 31 и r 32 и r 33 и t 3 \\ \ end {bmatrix} \ begin {bmatrix} x \\ y \\ z \\ 1 \ end {bmatrix}
.Допущения и характеристики данных
Есть несколько предварительных аспектов проблемы, которые являются общими для всех решений P n P. В большинстве решений предполагается, что камера уже откалибрована. Таким образом, его внутренние свойства уже известны, такие как фокусное расстояние, основная точка изображения, параметр перекоса и другие параметры. Некоторые методы, такие как UP n P. [4] или прямое линейное преобразование (DLT), применяемые к модели проекции, являются исключениями из этого предположения, поскольку они оценивают эти внутренние параметры, а также внешние параметры, которые составляют поза камеры, которую пытается найти оригинальный P n P.
Для каждого решения PnP выбранные соответствия точек не могут быть коллинеарными. Кроме того, P n P может иметь несколько решений, и выбор конкретного решения потребует последующей обработки набора решений. RANSAC также обычно используется с методом P n P, чтобы сделать решение устойчивым к выбросам в наборе точечных соответствий. Методы P3P предполагают, что данные не содержат шумов, большинство методов PnP предполагают гауссовский шум на множестве вставок.
Методы
В следующем разделе описываются два общих метода, которые можно использовать для решения проблемы P n P, которые также легко доступны в программном обеспечении с открытым исходным кодом, и то, как RANSAC может использоваться для работы с выбросами в наборе данных.
P3P
Когда, задача P n P находится в своей минимальной форме P3P и может быть решена с помощью трехточечных соответствий. Однако с помощью всего трех точечных соответствий P3P дает до четырех реальных, геометрически выполнимых решений. Для низких уровней шума можно использовать четвертое соответствие, чтобы устранить двусмысленность. Постановка проблемы следующая.
Пусть P будет центром проекции для камеры, A , B и C будут точками трехмерного мира с соответствующими точками изображения u , v и w .Пусть X = | PA | , Y = | PB | , Z = | ПК | ,
, , , , , , , , . Это формирует треугольники PBC , PAC и PAB , из которых мы получаем достаточную систему уравнений для P3P:\ begin {cases} Y 2 + Z 2 — YZp — b ‘ 2 и = 0 \\ Z 2 + X 2 — XZq — c ‘ 2 и = 0 \\ X 2 + Y 2 — XYr — a ‘ 2 и = 0 \\ \ end {case}
.Решение системы P3P приводит к появлению до четырех геометрически выполнимых реальных решений для и. Самое старое опубликованное решение датируется 1841 годом. [5] Недавний алгоритм решения проблемы, а также классификация решений для него даны в статье IEEE Transactions on Pattern Analysis and Machine Intelligence 2003 года, подготовленной Гао и др. [6] Реализацию решателя Gao P3P с открытым исходным кодом можно найти в модуле OpenCV calib3d в функции resolvePnP . [7] С тех пор было опубликовано несколько более быстрых и более точных версий, в том числе Lambda Twist P3P [8] , которая достигла высочайшего уровня производительности в 2018 году с 50-кратным увеличением скорости и 400-кратным уменьшением числа отказов. Lambdatwist доступен в виде открытого исходного кода в OpenMVG и на https://github.com/midjji/pnp.
EP
n PEfficient P n P (EP n P) — метод, разработанный Lepetit, et al. в статье [9] в Международном журнале компьютерного зрения 2008 года, которая решает общую проблему P n P для.Этот метод основан на представлении о том, что каждая из n точек (которые называются опорными точками) может быть выражена как взвешенная сумма четырех виртуальных контрольных точек. Таким образом, координаты этих контрольных точек становятся неизвестными для задачи. Именно из этих контрольных точек решается окончательная поза камеры.
В качестве обзора процесса сначала отметьте, что каждая из опорных точек в мировой системе отсчета
, и соответствующие им точки изображения, , — взвешенные суммы четырех контрольных точек, а также соответственно, а веса нормализованы по контрольной точке, как показано ниже.Все точки выражены в однородной форме. } = 1 Отсюда вывод опорных точек изображения становится Контрольная точка однородного изображения имеет вид . Преобразование уравнения опорной точки изображения приводит к следующим двум линейным уравнениям для каждой опорной точки:{\ alpha ij
+ \ alpha ij (u 0 —
= 0
{\ alpha ij
+ \ alpha ij (версия 0 —
= 0
.Используя эти два уравнения для каждой из реперных точек, система может быть сформирован там, где . Решение для контрольных точек существует в нулевом пространстве и выражается как куда это количество нулевых сингулярных значений в и каждый — соответствующий правый сингулярный вектор . может принимать значения от 0 до 4. После расчета начальных коэффициентов , для их уточнения используется алгоритм Гаусса-Ньютона. Матрицы и, минимизирующие ошибку перепроецирования мировых реперных точек, , и соответствующие им фактические точки изображения , затем вычисляются.Это решение имеет
сложность и работает в общем случае P n P как для плоских, так и для неплоских контрольных точек. Программные реализации этого метода с открытым исходным кодом можно найти в модуле OpenCV Camera Calibration and 3D Reconstruction в функции resolvePnP , а также в коде, опубликованном Lepetit, et al. на их веб-сайте CVLAB at EPFL. [10]Этот метод не является устойчивым к выбросам и обычно плохо сравнивается с RANSAC P3P с последующим нелинейным уточнением.
SQPnP
SQPnP был описан Терзакисом и Луракисом в статье ECCV 2020. [11] Это неминимальный неполиномиальный решатель, который преобразует P n P как нелинейную квадратичную программу. SQPnP идентифицирует области в пространстве параметров трехмерных вращений (т. Е. 8-сфера), которые содержат уникальные минимумы с гарантиями того, что хотя бы один из них является глобальным. Каждый региональный минимум вычисляется с помощью последовательного квадратичного программирования, которое начинается с ближайших ортогональных матриц аппроксимации.
SQPnP имеет аналогичную или даже более высокую точность по сравнению с современными полиномиальными решателями, является оптимальным в глобальном масштабе и вычислительно эффективным, будучи практически линейным по количеству предоставленных точек. Реализация включена в модуль калибровки камеры и 3D-реконструкции OpenCV. [12]
Использование RANSAC
P n P подвержен ошибкам, если в наборе точечных соответствий есть выбросы. Таким образом, RANSAC можно использовать в сочетании с существующими решениями, чтобы сделать окончательное решение для камеры более устойчивым к выбросам.Реализацию с открытым исходным кодом методов P n P с RANSAC можно найти в модуле калибровки камеры и 3D-реконструкции OpenCV в функции resolvePnPRansac . [12]
См. Также
Внешние ссылки
Примечания и ссылки
- Fischler. М.А. Боллес. R.C. Консенсус случайной выборки: парадигма подгонки модели с приложениями для анализа изображений и автоматизированной картографии. Коммуникации ACM. 1981 г.24. 6. 381–395. 10.1145 / 358669.358692.
- Яблоко. Команда АРКИТ. Понимание отслеживания и обнаружения ARKit. WWDC. 2018.
- Fabbri. Рикардо. Гиблин. Питер . Кимиа. Бенджамин. 2012 г. Оценка положения камеры с использованием дифференциальной геометрии кривой первого порядка. Конспект лекций по информатике (ECCV 2012). 7575. 231–244. 10.1007 / 978-3-642-33765-9_17. Конспект лекций по информатике. 978-3-642-33764-2.
- Penate-Sanchez. А. Андраде-Четто.Дж. Морено-Ногер. Ф. Исчерпывающая линеаризация для надежной оценки положения камеры и фокусного расстояния. IEEE Transactions по анализу шаблонов и машинному анализу. 2013 . 35. 10. 2387–2400. 10.1109 / TPAMI.2013.36. 23969384. 2117/22931. бесплатно .
- Quan. Длинный. Lan. Чжун-Дань. Определение позы линейной N-точки камеры. IEEE Transactions по анализу шаблонов и машинному анализу. 1999.
- Gao. Сяо-Шань. Хоу. Сяо-Жун. Тан. Цзянлян. Ченг. Ханг-Фэй. Полная классификация решений перспективной трехточечной задачи.IEEE Transactions по анализу шаблонов и машинному анализу. 2003. 25. 8. 930–943. 10.1109 / tpami.2003.1217599.
- Веб-сайт: Калибровка камеры и 3D-реконструкция. OpenCV.
- Persson. Микаэль. Нордберг. Клас. Lambda Twist: точный быстрый и надежный перспективный трехточечный решатель (P3P). Европейская конференция по компьютерному зрению (ECCV). 2018.
- Лепетит. В .. Морено-Ногуэр. М .. Фуа. P .. EPnP: точное O (n) решение проблемы PnP. Международный журнал компьютерного зрения.2009. 81. 2. 155–166. 10.1007 / s11263-008-0152-6. 2117/10327. бесплатно.
- Веб-сайт: EPnP: Эффективная оценка положения камеры в точке n. EPFL-CVLAB.
- Terzakis. Джордж. Луракис. Манолис. Последовательно быстрое и глобально оптимальное решение проблемы перспективных n точек. Европейская конференция по компьютерному зрению (ECCV). 478-494. 2020. 10.1007 / 978-3-030-58452-8_28.
- Веб-сайт: Калибровка камеры и 3D-реконструкция. OpenCV.
Свойство перспективы CSS
Пример
Придать перспективу трехмерному элементу:
# div1
{
перспектива: 100 пикселей;
}
Дополнительные примеры «Попробуйте сами» ниже.
Определение и использование
Свойство перспективы используется для придания трехмерному расположению элемента некоторой
перспектива.
Свойство перспективы определяет, как далеко объект находится от пользователя.
Таким образом, более низкое значение приведет к более интенсивному 3D-эффекту, чем более высокое значение.
При определении свойства перспективы для элемента это элементы CHILD. которые получают вид в перспективе, а НЕ сам элемент.
Совет: Также обратите внимание на свойство перспективы-происхождения, который определяет, в какой позиции пользователь смотрит на 3D-объект.
Чтобы лучше понять перспективное свойство, просмотреть демо.
Поддержка браузера
Числа в таблице указывают первую версию браузера, полностью поддерживающую свойство.
Числа, за которыми следует -webkit- или -moz-, указывают первую версию, которая работала с префиксом.
| Имущество | |||||
|---|---|---|---|---|---|
| перспектива | 36.0 12.0 -webkit- | 10,0 | 16,0 10,0 млн унций | 9.0 4.0.3 -webkit- | 23,0 15,0 -webkit- |
Синтаксис CSS
перспектива: длина | нет;
Стоимость недвижимости
| Стоимость объекта | Описание |
|---|---|
| длина | Как далеко расположен элемент от поля зрения |
| нет | Значение по умолчанию.То же, что и 0. Перспектива не установлена |
| начальный | Устанавливает для этого свойства значение по умолчанию. Читать о начальных |
| унаследовать | Наследует это свойство от своего родительского элемента. Читать о наследовании |
Другие примеры
Пример
Создайте куб и установите разные перспективы:
.ex1 {перспектива: 800 пикселей;
}
.ex2 {
перспектива: 150 пикселей;
}
Связанные страницы
Учебное пособие по CSS: 3D-преобразования CSS
Ссылка на HTML DOM: свойство перспективы
Перспектива, № 2022 — 1 ТРАНСПОРТ
В то время как исследование перевозки ценностей культурного наследия породило значительный объем специальной литературы и остается ключевым вопросом для учреждений, ответственных за их сохранение, историография развития и стандартизации его практик еще предстоит установить.И наоборот, в истории искусства, где феномены художественного обращения и переноса составляют хорошо известную область исследований, наиболее прагматические аспекты физического переноса объектов обычно игнорируются. Тема транспорта не только укоренена в материальной жизни вещей, но и ведет нас к альтернативной истории художественного производства, как предлагает Дженнифер Л. Робертс в книге « Transporting Visions». The Movement of Images in Early America (Berkeley, University of California Press, 2014), ссылаясь на случай художников, которые полностью осознают будущую мобильность своих работ в момент их создания.Объединив такие профессиональные, технические, научные и методологические вопросы, этот выпуск «Перспективы» призван пролить свет на то, как археологи, историки искусства, кураторы и другие исследователи в области гуманитарных наук занимаются транспортировкой предметов и произведений искусства, и раскрыть богатство из его многочисленных последствий.
Предложения должны соответствовать редакционной политике журнала, которая нацелена на , выходящую за рамки простых тематических исследований , чтобы выявить конкретных историографических вопросов и, в этом случае, проанализировать способы использования истории искусства, истории культурного наследия и археологии концепции транспорта, чтобы переосмыслить свои методы и научные рамки .
Пожалуйста, отправьте свое предложение (резюме из 2 000–3 000 знаков, с предварительным названием, краткая библиография по теме и биография из 2–3 строк) на адрес редакции ([email protected]) до 12 мая. , 2021.
Авторы избранных статей будут проинформированы о решении комитета в июне 2021 года . Полные тексты принятых статей необходимо отправить до 1 октября 2021 года для публикации в июне 2022 года. Они будут окончательно приняты после анонимного рецензирования журнала.
