Куда направлена тень от предметов в 13 00: 500 Internal Server Error
Что делать, если заблудились в лесу — Администрация Тотемского района
Как ориентироваться по солнцу, чтобы не заблудиться в лесу
Для каждого туриста, охотника или грибника основным прибором, помогающим не заблудиться в незнакомой местности, является компас. Но далеко не все имеют его при себе, отправляясь в лес. Поэтому важно знать другие способы, как ориентироваться – по солнцу, по звёздам, при помощи различных природных ориентиров. Самые разные ситуации могут произойти во время путешествий или прогулок за грибами. Заблудиться можно как в дремучем, густом лесу, так и в открытой степи.
В любом случае, для того чтобы найти дорогу домой, нужно правильно ориентироваться в окружающем пространстве. Это значит — уметь определить стороны горизонта, свое положение по отношению к ближайшим населенным пунктам и выбрать направление движения к ним. Основы этих знаний заложены в школьной программе. Для ориентации в географии обозначают четыре главных направления – север, запад, юг и восток.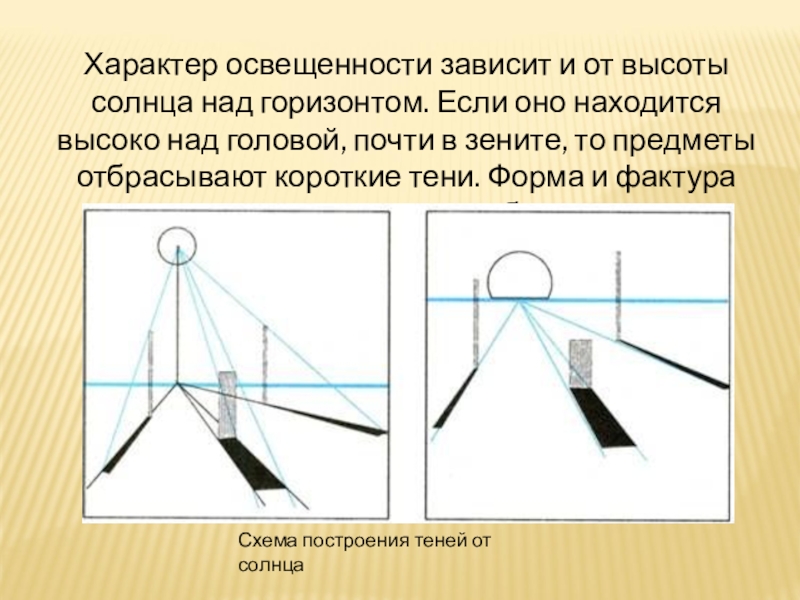
За годы своего существования человечество выработало большое количество разных методов определения сторон света. Еще в древности люди знали основной принцип как ориентироваться по солнцу – восточное направление указывает место его восхода, а западное – место заката. Все древние карты ориентировались на юг, который определялся положением солнца в зените. Сегодня, имея при себе компас, очень просто определить стороны горизонта. Для того чтобы этот прибор смог выполнить свою роль, понадобятся какие-либо ориентиры, относительно которых будет строиться маршрут.
Ориентирование по солнцу. Выяснить, где север, а где юг, можно и без компаса, если знать, как ориентироваться на местности по солнцу. Поможет сделать это знание точного места его восхода и захода в определенное время года. Ошибочным является мнение, что солнце всходит на востоке, а заходит на западе. На самом деле в северном полушарии это происходит лишь 21 марта и 23 сентября (дни равноденствия). Летом солнце появляется утром на горизонте с северо-востока, заходит на северо-западе, а на юге бывает ровно в полдень. Начиная с 21 марта солнце всходит все севернее, а с приближением зимы (после 23 сентября) – все южнее.
Летом солнце появляется утром на горизонте с северо-востока, заходит на северо-западе, а на юге бывает ровно в полдень. Начиная с 21 марта солнце всходит все севернее, а с приближением зимы (после 23 сентября) – все южнее.
Ориентирование по солнцу и тени. Расположение небесного светила на небе меняется в течение дня. Двигаясь с востока на запад, в полдень солнце находится выше всего. В это время все окружающие предметы отбрасывают наиболее короткую тень за весь световой день, указывающую направление на север. Определение сторон света по короткой тени, падающей в полдень от деревьев — это один из многих способов, как ориентироваться в лесу по солнцу. Если же поблизости нет деревьев, то для того, чтобы узнать, где находится север, можно воткнуть в землю любую палку вертикально и посмотреть, в какую сторону направлена тень. В другое время дня тоже можно определить стороны горизонта этим методом. Воткнув в землю палку длиной около 1 метра, следует отметить любыми подручными средствами место, где заканчивается ее тень. Примерно через 15 минут, когда тень передвинется, снова отметить ее окончание. От первой метки до второй провести прямую линию, которую следует продолжить еще на один шаг. Теперь нужно встать к палке спиной таким образом, чтобы левая нога находилась в начале отрезка, а правая – в конце. В том направлении, куда вы смотрите, и будет находиться север. Погрешность этого метода наиболее велика в ранние утренние и поздние вечерние часы.
Примерно через 15 минут, когда тень передвинется, снова отметить ее окончание. От первой метки до второй провести прямую линию, которую следует продолжить еще на один шаг. Теперь нужно встать к палке спиной таким образом, чтобы левая нога находилась в начале отрезка, а правая – в конце. В том направлении, куда вы смотрите, и будет находиться север. Погрешность этого метода наиболее велика в ранние утренние и поздние вечерние часы.
Как можно ориентироваться по солнцу и времени суток. Этот метод очень простой, достаточно знать, в какие часы находится небесное светило в определенной точке горизонта. Обязательно нужно учитывать и время года. К примеру, летом солнце находится на востоке – примерно в 6-7 часов утра, в 9-10 часов – на юго-востоке, около 13 часов – на юге, в 15-16 часов – на юго-западе, а в 21 час – на северо-западе. Ориентирование по часам и солнцу Точнее определить стороны горизонта помогут самые обыкновенные часы с циферблатом. Цифровой индикатор в этом случае не подойдет. Часы нужно расположить таким образом, чтобы часовая стрелка смотрела на солнце. Затем мысленно провести линию, разделяющую угол от стрелки до цифры 1 пополам. Продолжение этой линии будет указывать на юг. Север, следовательно, будет находиться с противоположной стороны. В северных областях результат будет более точный, в южных погрешность может составлять до 20%. Есть еще один способ, как ориентироваться по часам и солнцу. Скорость перемещения солнца в летний период составляет примерно 15 градусов в час. Если учитывать, что в полдень оно находится на юге, то в 17 часов оно сместится к западу на 45 градусов (17-14)х15. Это будет половина прямого угла. Остается лишь мысленно отмерить влево это расстояние – это и будет направление на юг.
Часы нужно расположить таким образом, чтобы часовая стрелка смотрела на солнце. Затем мысленно провести линию, разделяющую угол от стрелки до цифры 1 пополам. Продолжение этой линии будет указывать на юг. Север, следовательно, будет находиться с противоположной стороны. В северных областях результат будет более точный, в южных погрешность может составлять до 20%. Есть еще один способ, как ориентироваться по часам и солнцу. Скорость перемещения солнца в летний период составляет примерно 15 градусов в час. Если учитывать, что в полдень оно находится на юге, то в 17 часов оно сместится к западу на 45 градусов (17-14)х15. Это будет половина прямого угла. Остается лишь мысленно отмерить влево это расстояние – это и будет направление на юг.
Природные ориентиры. В случае когда выдался пасмурный день, можно воспользоваться другими ориентирами, имеющимися в лесу, так как ориентироваться по солнцу не представляется возможным. Подсказать, где север, а где юг, могут деревья.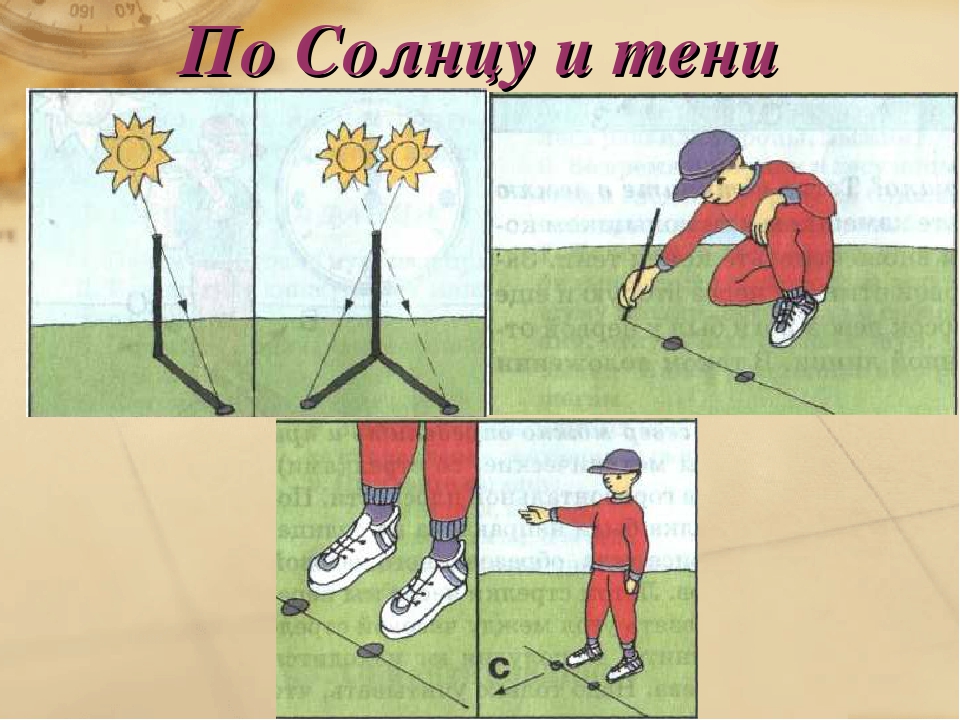 Лишайники и мох покрывают обычно северную сторону их ствола. От солнечных лучей влага с южной стороны деревьев просыхает достаточно быстро, поэтому лишайник не имеет шансов выжить. Кроме того, ветви с южной стороны дерева более длинные и густые.
Лишайники и мох покрывают обычно северную сторону их ствола. От солнечных лучей влага с южной стороны деревьев просыхает достаточно быстро, поэтому лишайник не имеет шансов выжить. Кроме того, ветви с южной стороны дерева более длинные и густые.
Поможет определить стороны горизонта и обычный муравейник. Обычно он расположен с южной стороны дерева, так как иначе на него бы падала тень. Муравьям же необходимы солнечные лучи. Кроме того, склон муравейника с северной стороны более крутой. Природные ориентиры нужно обязательно использовать в комплексе, не полагаясь на какой-либо один. Если внимательно присматриваться к окружающим предметам, а также знать, как ориентироваться по солнцу и компасу, любой поход в лес обязательно закончится благополучно.
Как собраться в лес
1. Перед тем как отправиться в лес, необходимо детально изучить местность. Рассказать о своих планах родственникам и близким друзьям, упомянуть о месте, куда отправляешься, и когда планируешь вернуться. Ведь если человек заблудился в лесу, спасатели должны знать, в каком районе искать.
Ведь если человек заблудился в лесу, спасатели должны знать, в каком районе искать.
2. Собрать все необходимое. Главное, чтобы был полностью заряженный телефон, спички в непромокаемой упаковке, нож, также стоит взять с собой компас и фонарик. Тогда вопрос о том, как не заблудиться в лесу, не будет таким острым. Обязательно взять питьевую воду. Желательно прихватить и небольшой запас продуктов. Лучше, если они будут нетяжелые, но калорийные, например орехи, шоколад или пачка печенья. По возможности прихватить медикаменты (например, лейкопластырь, бинт, болеутоляющие средства).
3. Обязательно правильно выбрать одежду для похода. Она должна быть удобной, непромокаемой. В лесу есть опасность быть укушенным клещом, поэтому необходимо, чтобы кофта была с длинным рукавом, а штанины брюк были заправлены в сапоги. Не стоит забывать про головной убор. Лучше, если одежда будет светлой, это поможет быстрее обнаружить клеща. Также стоит приобрести репелленты, которые отпугивают клещей и других насекомых. Только стоит помнить, что наносить их можно только на одежду и ни в коем случае не на кожные покровы, так как эти средства могут вызвать аллергические реакции. Правильно собраться – это полдела, стоит также правильно вести себя в лесу и знать, что делать, если заблудился.
Также стоит приобрести репелленты, которые отпугивают клещей и других насекомых. Только стоит помнить, что наносить их можно только на одежду и ни в коем случае не на кожные покровы, так как эти средства могут вызвать аллергические реакции. Правильно собраться – это полдела, стоит также правильно вести себя в лесу и знать, что делать, если заблудился.
Как вести себя в лесу?
Не стоит отправляться в лес в одиночку, в компании всегда веселее, да и шанс потеряться ниже. Посещать лес лучше в первой половине дня и стараться не задерживаться до темноты. Нужно запоминать, с какой стороны вы вошли в лес.
Стараться искать какие-нибудь ориентиры, тогда не придется ломать голову над тем, как не заблудиться в лесу. Например, если вы зашли со стороны реки и двигались на юг, то возвращаться вам стоит на север, и в конце концов вы придете опять к этой реке. Стоит выбирать линейные ориентиры, к примеру, железнодорожные пути, автомобильные дороги или реки.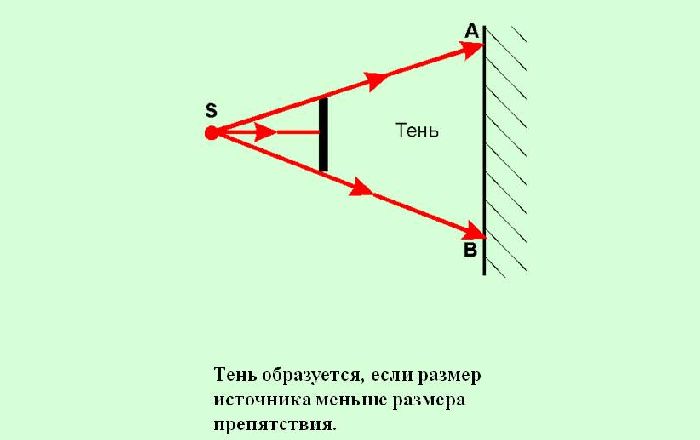
Передвигаться лучше по тропинкам. Если же решили отправиться вглубь леса, надо оставлять пометки по пути — можно привязывать яркие метки на деревья, делать зарубки либо надламывать веточки на своем пути. Но тропинки иногда попадаются звериные. Надо понимать, что если при передвижении по тропе в лицо бьют ветки, значит, по ней ходят низкорослые дикие звери, и продолжать движение по такой дорожке не стоит.
Если решили развести костер, то надо делать это правильно. Лучше разводить его на том месте, где уже есть старое кострище. Если такого нет, надо окопать территорию вокруг с помощью лопаты или топора. Разводите костер подальше от нависающих веток деревьев, сухостоя и старых сухих пней. Не разводите большой костер. Даже если он будет небольшим, но обложенным камнями, он даст достаточно тепла. Обязательно затушить костер перед уходом с места стоянки.
Ну и, конечно, не стоит мусорить в лесу. Отправившись в лес, частенько забываешь о времени. Сбор грибов или ягод может настолько увлечь, что в какой-то момент не понимаешь, где ты и куда дальше идти. Небольшая памятка заблудившемуся в лесу поможет без паники найти выход.
Отправившись в лес, частенько забываешь о времени. Сбор грибов или ягод может настолько увлечь, что в какой-то момент не понимаешь, где ты и куда дальше идти. Небольшая памятка заблудившемуся в лесу поможет без паники найти выход.
Заблудился в лесу, что делать?
Остановиться. Попробуйте отыскать свои следы и вернуться по ним. Если не выходит, следует успокоиться и прислушаться, возможно, вы услышите голоса своих друзей или других людей. Можно услышать шум дороги, протекающей неподалеку речки или поезда. Звуки лучше различимы в вечернее время и на пригорках. Считается, что звук проезжающего поезда слышен на расстоянии 10 километров, крики людей — за 1,5-2 километра.
Сотовая связь и экстренный вызов. Попробуйте позвонить по телефону людям, с которыми отправлялись в поход, или же родственникам, которые остались дома, но знают о вашей поездке в лес. Старайтесь не говорить много лишних слов и после окончания разговора выключить телефон, чтобы не садилась батарея.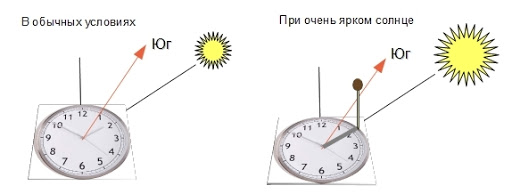 Если телефонной сети нет, надо позвонить по телефону 112, звонок доступен всегда.
Если телефонной сети нет, надо позвонить по телефону 112, звонок доступен всегда.
Дальше есть несколько вариантов поведения – либо оставаться на месте и ждать, пока вас найдут, либо искать дорогу самостоятельно. В ожидании помощи. Если вы решили оставаться на месте, то лучше будет развести костер. Он поможет не замерзнуть, да и с воздуха легко заметить дым. Костер лучше разводить на открытой поляне. Чтобы дым был сильнее, стоит бросить в пламя сырые ветки или что-нибудь пластмассовое. Можно взобраться на дерево, привязать что-нибудь к верхушке яркое и периодически трясти дерево. Если услышите какие-нибудь звуки, кричите в ответ. Поисковикам это поможет быстрее вас найти, а диких зверей отпугнет. Помните, что поиск заблудившихся в лесу — дело непростое, важно любыми способами обозначить свое местонахождение.
Если же понимаете, что помощь еще неблизко и стоит самому о себе позаботиться, то надо отправляться искать цивилизацию. Ориентирование на местности. В детстве нас часто учили ориентироваться на местности и тому, как не заблудиться в лесу. Рассказывали, что мох обычно растет с северной стороны деревьев, муравейники располагаются с юга. Но природа изменчива, и не стоит полагаться на эти признаки, лучше руководствоваться объективными данными. В поиске помогут ваши органы чувств. Присмотритесь. На земле могут быть отпечатки подошв обуви человека. Выяснив направление следов, отправляйтесь по ним. Если заметили линии электропередач, идите вдоль них. Прислушайтесь. Идите в направлении звука воды или шума машин. Добравшись до реки, лучше двигаться вдоль нее по течению. Реки обычно впадают в большие водоемы, а там есть вероятность встретить людей. Принюхайтесь. Если почувствовали дым костра, то надо идти против ветра на запах.
Ориентирование на местности. В детстве нас часто учили ориентироваться на местности и тому, как не заблудиться в лесу. Рассказывали, что мох обычно растет с северной стороны деревьев, муравейники располагаются с юга. Но природа изменчива, и не стоит полагаться на эти признаки, лучше руководствоваться объективными данными. В поиске помогут ваши органы чувств. Присмотритесь. На земле могут быть отпечатки подошв обуви человека. Выяснив направление следов, отправляйтесь по ним. Если заметили линии электропередач, идите вдоль них. Прислушайтесь. Идите в направлении звука воды или шума машин. Добравшись до реки, лучше двигаться вдоль нее по течению. Реки обычно впадают в большие водоемы, а там есть вероятность встретить людей. Принюхайтесь. Если почувствовали дым костра, то надо идти против ветра на запах.
Очень часто человека сбивает с правильного направления хождение по кругу. Этот феномен довольно прост. Размер шага правой ноги отличается от левой, это приводит к тому что человек как бы «загребает» одной ногой.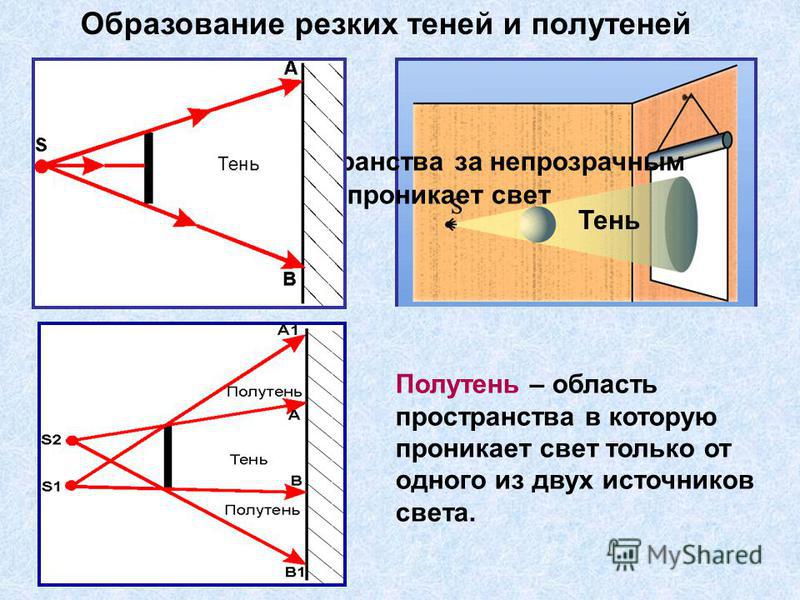 Чаще всего человек неосознанно поворачивает влево. В итоге, если идти «прямо» без каких-либо ориентиров, можно значительно отклониться от курса.
Чаще всего человек неосознанно поворачивает влево. В итоге, если идти «прямо» без каких-либо ориентиров, можно значительно отклониться от курса.
Дикие звери. В лесу могут подстерегать различные опасности, в том числе и дикие звери. В основном они боятся человека и не будут нападать первыми, если их не дразнить. При встрече с диким зверем необходимо постараться уйти на безопасное расстояние. Если же животное заинтересовалось вами, надо начинать шуметь — кричать, стучать, прыгать и размахивать руками. Если на пути встретился кабан, то пугать его лучше либо с большого камня, либо с дерева, так как кабаны очень непредсказуемы и могут от страха броситься вперед. Главное — не бежать от животных, иначе, повинуясь своим инстинктам, они бросятся вдогонку. Гораздо опаснее встретить на своем пути волка. С ним не надо шуметь, наоборот, необходимо громко и спокойно говорить, отступая спиной назад.
Про питание. Часто приходит вопрос: «Если заблудился в лесу, что делать в первую очередь?» Про обозначение места мы уже поговорили. Отдельно необходимо подумать о питании. В наших лесах много ягод и грибов. Ягодами, конечно, можно питаться, но особо на них надеяться не надо, съесть много их не получится, а в малых количествах они не сильно питательны. Если разбираетесь в грибах, стоит насобирать их. В ином случае лучше не рисковать. Грибы лучше отварить в воде дважды. Если у вас с собой нет котелка — не расстраиваетесь, можно обойтись и консервной банкой. Очень питательны лесные орехи. Если найдете лещину, наберите орехов с собой про запас. Можно питаться корой деревьев и корнем лопуха, который по вкусу напоминает картошку.
Отдельно необходимо подумать о питании. В наших лесах много ягод и грибов. Ягодами, конечно, можно питаться, но особо на них надеяться не надо, съесть много их не получится, а в малых количествах они не сильно питательны. Если разбираетесь в грибах, стоит насобирать их. В ином случае лучше не рисковать. Грибы лучше отварить в воде дважды. Если у вас с собой нет котелка — не расстраиваетесь, можно обойтись и консервной банкой. Очень питательны лесные орехи. Если найдете лещину, наберите орехов с собой про запас. Можно питаться корой деревьев и корнем лопуха, который по вкусу напоминает картошку.
Место ночлега. В том случае, если поиски затянулись, и время близится к ночи, стоит задуматься о ночлеге. Лучше выбрать сухое место на открытом участке около воды. Надо собрать как можно больше сухих веток для разведения костра, чтобы он прогорел всю ночь. Это и даст необходимое тепло, и отпугнет хищников. Хорошо, если есть полиэтиленовый пакет, можно надеть его на себя. Для ночлега стоит набрать еловые ветки, они лучше сохраняют тепло. Укрыться можно сухими листьями. Спать ложиться надо у костра, вытянувшись вдоль него. Заснуть человеку в стрессовой ситуации, конечно, сложно. Засыпать нужно с мыслью, что через несколько часов снова будет светло, и шансы на спасение увеличатся. Не стоит отчаиваться, поддаваться панике, терять надежду на возвращение. Главное условие спасения – желание выжить!
Для ночлега стоит набрать еловые ветки, они лучше сохраняют тепло. Укрыться можно сухими листьями. Спать ложиться надо у костра, вытянувшись вдоль него. Заснуть человеку в стрессовой ситуации, конечно, сложно. Засыпать нужно с мыслью, что через несколько часов снова будет светло, и шансы на спасение увеличатся. Не стоит отчаиваться, поддаваться панике, терять надежду на возвращение. Главное условие спасения – желание выжить!
КТ легких при коронавирусе: когда, зачем, как проводится?
Главная статьи КТ легких при коронавирусе: когда, зачем, как проводится?Вспышка нового коронавируса COVID-19, впервые зарегистрированная в китайской провинции Хубэй, в кратчайшие сроки охватила весь мир и всего за 9 месяцев унесла жизни около 1 млн. человек.
Коронавирус — это острое респираторное заболевание дыхательных путей, ассоциированное с вирусом SARS-CoV-2.
Коронавирусная инфекция нового типа быстро распространяется и легко передается от человека человеку воздушно-капельным или контактно-бытовым путем. Если мы рассмотрим коронавирус под микроскопом, то обратим внимание, что на поверхности вириона расположены белковые шипы — с их помощью вирус прочно прикрепляется к белкам-рецепторам на поверхности клеток человека, в частности легких.
Если мы рассмотрим коронавирус под микроскопом, то обратим внимание, что на поверхности вириона расположены белковые шипы — с их помощью вирус прочно прикрепляется к белкам-рецепторам на поверхности клеток человека, в частности легких.
Коронавирус приводит к тяжелым осложнениям — воспалению и фиброзу легких, лихорадке, острой дыхательной и сердечной недостаточности. Компьютерная томография (КТ) легких на сегодняшний день признана основным методом диагностики коронавируса. Этот метод исследования достоверно и на ранних стадиях показывает паттерн поражения легких, то есть пневмонию, при которой альвеолы заполняются патологическим субстратом (жидкостью, фиброзной тканью), а не воздухом.
Под паттерном («моделью, схемой, узором») в медицине понимается совокупность признаков и симптомов, типичных для того или иного клинического состояния. Например, сочетание «матовых стекол» и их консолидация в определенных участках легких визуализируется на томограммах и трактуется как паттерн вирусной пневмонии COVID-19.
Поражение легких более чем на 50% считается опасным и требует госпитализации, особенно если пульсоксиметр показывает сатурацию (насыщение крови кислородом) менее 92-93%.
Нужно ли делать КТ легких при коронавирусе?
Во время первой волны эпидемии COVID-19 в апреле 2020 г. российские медики отмечали, что у 45,5% зараженных не отмечалось клинических проявлений заболевания — у таких пациентов коронавирусная инфекция развивалась бессимптомно. На сегодняшний день КТ легких считается основным методом диагностики вирусной пневмонии, главным последствием которой является частичное поражение легких.
Альвеолы представляют собой небольшие воздушные ячейки в легком. Когда их объем сокращается из-за фиброза или скопления жидкости, происходит критическое нарушение дыхательной функции. У человека возникает одышка, кашель с мокротой (иногда с кровью), повышается температура тела.
При пневмонии, вызванной COVID-19, чаще всего беспокоит:
- Боль и дискомфорт в груди;
- Одышка и нехватка воздуха;
- Сухой кашель;
- Потеря обоняния;
- Повышенная температура.

Лабораторные анализы крови, направленные на выявление и определение вирусного возбудителя, иногда дают ложноотрицательный результат. В этой связи медиками было принято конвенциональное решение, согласно которому наличие признаков поражение легких на томограммах, несмотря на отрицательный ПЦР, должны расцениваться как вероятная коронавирусная инфекция до тех пор, пока не будет поставлен альтернативный диагноз.
Другим методом лучевой диагностики пневмонии при коронавирусе является стандартная рентгенография грудной клетки. Рентген — более доступный по цене и распространенности метод обследования. Однако он существенно уступает компьютерной томографии по информативности. Дело в том, что рентген не показывает поражение легких I и II степени. У этого метода есть и другие недостатки, например, при наложении теней от крупных органов друг на друга возникают артефакты, которые могут быть истолкованы неверно.
Согласно действующим клиническим рекомендациям, в условиях пандемии любые уплотнения (инфильтрации) легочной ткани и признаки воспалительных изменений на рентгенограммах должны рассматриваться как подозрительные в отношении COVID-19..jpg.09ee3da5c63a37feba12a54002e59595.jpg)
Поражение легких при коронавирусе на КТ
При подозрении на наличие коронавирусной инфекции пациентов чаще всего беспокоят вопросы: как определяют степень поражения легких, когда необходима госпитализация и можно ли восстановить легкие после пневмонии? Разберем подробнее эту тему и посмотрим, чем будет полезна компьютерная томография легких.
Проявления коронавируса
Согласно наблюдениям китайских ученых и медиков, обобщенным в «Справочнике по профилактике и лечению COVID-19», боль в груди при коронавирусе свидетельствует уже о прогрессирующем (около 10 дней) заболевании. При легком течении пневмонии на ранней стадии дискомфорт не беспокоит. Поэтому очень важно прислушиваться к своему организму (особенно дыханию), измерять температуру. А если вы контактировали с больным или людьми из эпидемиологически неблагоприятных стран, необходимо сделать тест на COVID-19 и КТ легких.
Легочная ткань не может сильно болеть, поскольку в ней совсем немного нервных рецепторов. Дискомфорт в легких при коронавирусе — следствие отека воспалительного характера. Когда альвеолы легких заполняются жидкостью или фиброзной тканью, растягивается плевральная оболочка. Это и вызывает боль тупого характера. Наряду с этим при коронавирусе пациент может ощущать:
- Давление в груди, сильное распирание;
- Неприятные ощущения во время глубокого вдоха, при резком вдохе отмечается сильный продолжительный кашель;
- Дискомфорт в области шеи, ключиц, между ребер.
Однако похожие симптомы характерны и для других респираторных заболеваний. Тем не менее, чтобы исключить коронавирус или вовремя его обнаружить и предотвратить развитие дистресс-синдрома.
ОРДС (острый респираторный дистресс-синдром или «шоковое лёгкое» ) — это острое и тяжелое состояние, которое характеризуется двухсторонней инфильтрацией и отеком лёгких с выраженной гипоксемией.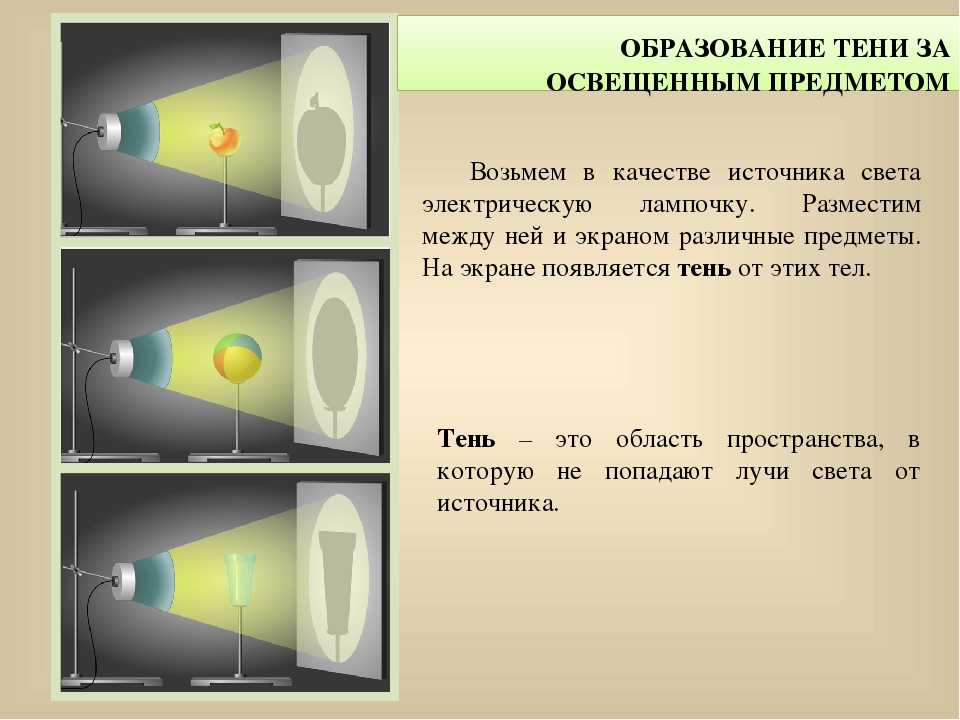 Обширный воспалительный процесс резко вызывает у больного дыхательную недостаточность, проблемы с сердцем, спазм легочных сосудов. У некоторых пациентов переходит в фиброз, после которого полное восстановление пораженных легких иногда невозможно. ОРДС — основная причина летальных исходов при коронавирусе.
Обширный воспалительный процесс резко вызывает у больного дыхательную недостаточность, проблемы с сердцем, спазм легочных сосудов. У некоторых пациентов переходит в фиброз, после которого полное восстановление пораженных легких иногда невозможно. ОРДС — основная причина летальных исходов при коронавирусе.
Как выглядит поражение легких на КТ
На поражение легких, вызванное коронавирусом нового типа, указывают так называемые «матовые стекла» — сравнительно светлые участки, напоминающие налет, которые свидетельствуют об уплотнении ткани. В норме «матовых стекол» быть не должно. Особенность компьютерной томографии заключается в том, что такие признаки коронавирусной пневмонии видны достаточно ясно, даже если легкие поражены на 5% и менее. Традиционная рентгенография и другие аппаратные методы диагностики обладают меньшей разрешающей способностью, поэтому могут дать неоднозначный результат.
При пневмонии, ассоциированной с COVID-19, участки «матового стекла» располагаются в обоих легких: в нижних и боковых отделах, вокруг бронхов или ближе к плевре. КТ позволяет определить степень поражения легких при коронавирусе. Менее трех «матовых стекол» соответствуют легкой степени заболевания, более трех свидетельствуют об умеренном поражении легких. Если наблюдается их консолидация, состояние пациента оценивают как среднетяжелое, с распространенными уплотнениями — тяжелое.
КТ позволяет определить степень поражения легких при коронавирусе. Менее трех «матовых стекол» соответствуют легкой степени заболевания, более трех свидетельствуют об умеренном поражении легких. Если наблюдается их консолидация, состояние пациента оценивают как среднетяжелое, с распространенными уплотнениями — тяжелое.
Чтобы оценить степень поражения в процентах, легкие делят на 5 долей: три в правом и две в левом. Врач-рентгенолог осматривает каждую долю и оценивает, насколько повреждена каждая из них по пятибалльной шкале, где 1 балл соответствует 5% обструкции и менее, а 5 баллов — более 75%. Далее все баллы складывают и умножают на 4. Полученное число и будет выражать степень поражения легких при коронавирусе в процентах. Если дыхательный орган функционирует на 50% и менее, это уже является основанием для госпитализации.
Помимо «матовых стекол» на КТ легких у пациентов, больных коронавирусом, врач увидит и другие клинически значимые признаки пневмонии:
- Синдром «булыжной мостовой» или «лоскутного одеяла» — когда уплотнение распространяется и на перегородки между дольками легких (примерно на третий день воспаления легких), то текстура легочной ткани на КТ сканах приобретает сходство с брусчаткой.
- Консолидацию «матовых стекол» — по мере развития заболевания (обычно на 5-8 день), легочная ткань становится все более плотной и хуже пропускает рентгеновские лучи, при этом становится меньше ее функциональных участков, участвующих в газообмене.
- Симптом обратного гало или синдром ободка — участки уплотнения вокруг очага инфекции («матового стекла»), похожие на кольца. Встречается у более 50% больных коронавирусом.
- Симптом воздушной бронхограммы — наличие воздуха в просвете бронхов наряду с выраженной консолидацией «матовых стекол».
Когда при коронавирусе нужно делать КТ легких?
Согласно принятой классификации выявленных патологических изменений, стандарт «КТ1» соответствует менее 25% поражению легких, «КТ2» — 35-50%, «КТ3» — 50-75%, «КТ4» — 75% и более. Особенность пневмонии, вызванной новым коронавирусом COVID-19, заключается в том, что переход осложнения в более тяжелую форму происходит быстро.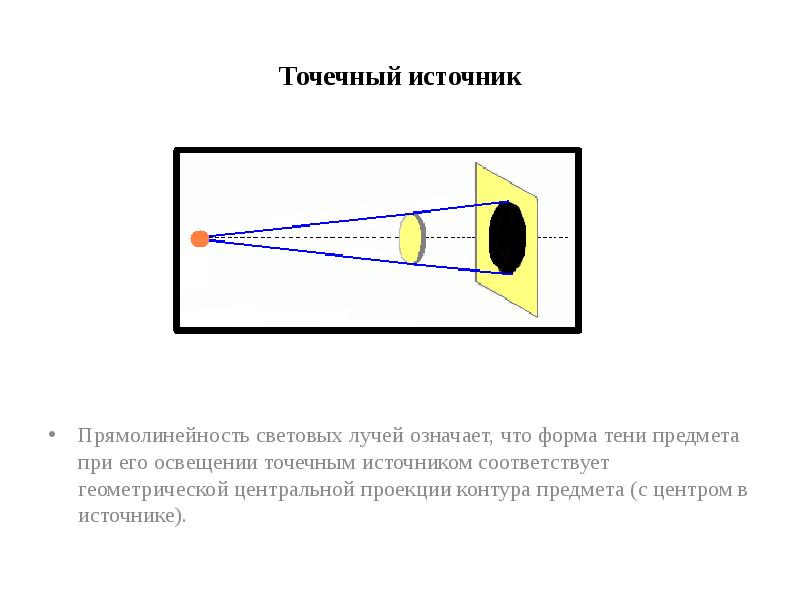
В отличие от рентгена, КТ покажет поражение легких 5% и менее — врач-рентгенолог видит даже единичные участки инфильтрации диаметром от 4-5 мм. По рентгеновскому снимку не определить пневмонию, соответствующую КТ1, а иногда и КТ2. При наличии характерных симптомов, даже в легкой форме, и положительного теста на COVID-19, нет необходимости ждать, пока инфекция интенсивнее распространится и вызовет поражение больших участков легких.
КТ легких показана при:
- Температуре 38 градусов;
- Частоте дыхания > 22 в минуту;
- Одышке / кашле / боли в груди;
КТ при коронавирусе делают даже в том случае, если тест на COVID-19 показывает отрицательный результат, а на рентгене не выявлены существенные изменения легочной ткани (очаги могут быть еще небольшими, на снимке могут быть артефакты и тени) — при этом пациента беспокоят вышеуказанные симптомы, не исключен контакт с больными в прошлом.
Какое КТ легких делают при коронавирусе?
Сегодня «золотым стандартом» КТ при коронавирусе считается посрезовое 1-2 мм сканирование на мультиспиральном томографе или МСКТ легких. Диагностика на таких современных аппаратах занимает всего минуту и позволяет получить снимки в максимально высоком разрешении. Процедура проходит в наиболее комфортных для пациента условиях, поэтому подходит даже больным, находящимся в тяжелом состоянии здоровья (при искусственной вентиляции легких). КТ легких при коронавирусе проводится без контраста, при этом диагностическая ценность превосходит рентген, МРТ, УЗИ.
В специализированном центре КТ «Ами» пациенты проходят КТ легких на мультиспиральном томографе нового поколения Siemens Somatom go.Now со сниженной лучевой нагрузкой и сразу получают запись исследования (КТ сканы) на DVD-диске.
Как делают КТ легких при коронавирусе
Специальная предварительная подготовка к исследованию не требуется. Перед процедурой пациенту необходимо снять все металлические предметы и украшения, поскольку они ослабляют рентгеновские лучи. Затем пациента приглашают в процедурную, тот ложится на диагностический стол. Медицинская сестра включает томограф, и стол постепенно движется к гентри — раме томографа, оснащенной чувствительными датчиками. Гентри сканера вращается вокруг грудной клетки и делает множество сканов (снимков). Все это время сохраняется обратная связь врача-рентгенолога с пациентом. КТ легких делают на вдохе, пациент на несколько секунд задерживает дыхание. Затем изображения обрабатываются на компьютере — программа делает объемную 3D-реконструкцию внутренних органов. Врач-рентгенолог изучает полученные данные, записывает томограмму на диск и готовит заключение.
Перед процедурой пациенту необходимо снять все металлические предметы и украшения, поскольку они ослабляют рентгеновские лучи. Затем пациента приглашают в процедурную, тот ложится на диагностический стол. Медицинская сестра включает томограф, и стол постепенно движется к гентри — раме томографа, оснащенной чувствительными датчиками. Гентри сканера вращается вокруг грудной клетки и делает множество сканов (снимков). Все это время сохраняется обратная связь врача-рентгенолога с пациентом. КТ легких делают на вдохе, пациент на несколько секунд задерживает дыхание. Затем изображения обрабатываются на компьютере — программа делает объемную 3D-реконструкцию внутренних органов. Врач-рентгенолог изучает полученные данные, записывает томограмму на диск и готовит заключение.
Что еще показывает КТ легких?
Помимо пневмоний, КТ грудной клетки показывает туберкулез, опухоли легких и средостения, заболевания (лимфоаденопатию) средостения, тимомы и другие новообразования средостения. В этом случае диагностика мягких тканей с помощью компьютерной томографии даже предпочтительнее МРТ легких. Также КТ грудной клетки делают после травм, переломов ребер и грудного отдела позвоночника для оценки повреждений. КТ грудной клетки с контрастом позволяет дополнительно визуализировать сосуды. В рамках исследования с контрастным усилением врач может увидеть и детально оценить тромбоэмболии легочной артерии, опухоли легких, грудную аорту.
В этом случае диагностика мягких тканей с помощью компьютерной томографии даже предпочтительнее МРТ легких. Также КТ грудной клетки делают после травм, переломов ребер и грудного отдела позвоночника для оценки повреждений. КТ грудной клетки с контрастом позволяет дополнительно визуализировать сосуды. В рамках исследования с контрастным усилением врач может увидеть и детально оценить тромбоэмболии легочной артерии, опухоли легких, грудную аорту.
КТ легких после коронавируса
КТ легких при коронавирусе делают не только с целью оценки поражения легких, но и для мониторинга процесса восстановления в рамках терапии. Первую делают через три дня после начала лечения, если оно не дает результатов, и пациент не идет на поправку. Следующую томографию можно повторить через неделю, если состояние больного не улучшается.
При благоприятном лечении в реабилитационном периоде КТ легких можно пройти дважды (интервал — 2-3 недели), чтобы отслеживать динамику восстановления легких после коронавируса. Всего в год рекомендовано делать не более 5 КТ.
Всего в год рекомендовано делать не более 5 КТ.
Легочная ткань эластична и способна к регенерации. Если патология вовремя обнаружена, и предприняты меры лечения, то организм пациента может справиться с инфекцией за 1 месяц, а после реабилитации функциональность легких будет полностью восстановлена.
Если пациент поступил в медицинское учреждение с поражением легких более 50%, перенес тяжелую пневмонию или острый респираторный дистресс-синдром, то возможно формирование фиброза. Последствия фиброза легких напоминают рубцы, и такие патологические изменения могут быть необратимыми. Однако если поражены небольшие участки, то они с функциональной точки зрения легко компенсируются здоровыми и в течении жизни не ощущаются. Целесообразность и количество повторных компьютерных томографий в реабилитационном периоде определяется врачом.
Светотень. Условия и закономерности освещения предметов — Ghenadie Sontu Fine Art
При освещении цилиндра лучами, наклонными к его оси, линия собственной тени пройдет по половине окружности основания, двум образующим и полуокружности другого основания. Наибольшая освещенность в этом случае займет небольшое место на обращенной к свету стороне окружности основания. Рассматривая с разных точек зрения цилиндр, освещенный постоянным источником света, мы заметим, что линия собственной тени не меняет своего места на поверхности цилиндра. Однако самое светлое место будет зрительно восприниматься самым светлым лишь в том случае, когда направление взгляда совпадает с направлением лучей света (точка зрения 7, рис. 8).
Наибольшая освещенность в этом случае займет небольшое место на обращенной к свету стороне окружности основания. Рассматривая с разных точек зрения цилиндр, освещенный постоянным источником света, мы заметим, что линия собственной тени не меняет своего места на поверхности цилиндра. Однако самое светлое место будет зрительно восприниматься самым светлым лишь в том случае, когда направление взгляда совпадает с направлением лучей света (точка зрения 7, рис. 8).
При перемещении точки зрения вокруг цилиндра воспринимаемое глазом относительно светлое место также перемещается: оно будет располагаться в том месте поверхности, которое отражает наибольшее количество лучей света в глаз зрителя. При этом воспринимаемая глазом область полусветов и полутеней, заключенная между перемещающимся относительно светлым местом и постоянной линией собственной тени, соответственно изменяется (точки зрения 2, 3, 4). На глянцевых поверхностях перемещение воспринимаемого глазом относи тельно светлого места выражено наиболее ясно: в тех точках поверхности предмета, в которых угол падения лучей от источника света равен углу их отражения в глаз зрителя, относительно светлое место воспринимается как яркий блик. Таким образом, если положение линии собственной тени на предмете зависит только от формы предмета и положения источника света, то воспринимаемое зрителем относительно светлое место или блик, а также полусвета и полутени зависят, кроме того, еще и от местоположения глаза.
Таким образом, если положение линии собственной тени на предмете зависит только от формы предмета и положения источника света, то воспринимаемое зрителем относительно светлое место или блик, а также полусвета и полутени зависят, кроме того, еще и от местоположения глаза.
Распределение элементов светотени на конусе имеет некоторые особенности. При боковом освещении абсолютно светлое место, медленно уширяясь к основанию конуса, принимает форму треугольника. При направлении параллельных лучей света, перпендикулярном оси конуса, собственная тень занимает половину его боковой поверхности. При перемене направления лучей источника света по отношению к оси конуса образующие, по которым проходит линия собственной тени, как бы сдвигаются, уменьшая или увеличивая область тени. Когда угол наклона луча света к оси конуса становится меньше угла наклона образующей, коническая поверхность оказывается освещенной целиком, если свет направлен со стороны вершины конуса, и вся погружается в тень, если свет направлен со стороны основания.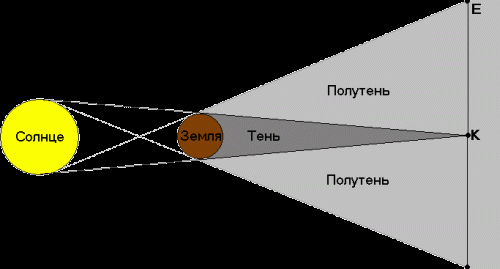 В этих случаях падающая тень от конуса будет тенью от круга его основания. Контраст между светом и тенью по мере уменьшения кривизны (рис. 9), т. е. увеличения радиуса конической поверхности, также уменьшается. Рассматривая конус с различных точек зрения (рис. 10), заметим, что воспринимаемое глазом относительно светлое место и область полусветов и полутеней перемещаются подобно тому, как это наблюдалось на цилиндре.
В этих случаях падающая тень от конуса будет тенью от круга его основания. Контраст между светом и тенью по мере уменьшения кривизны (рис. 9), т. е. увеличения радиуса конической поверхности, также уменьшается. Рассматривая конус с различных точек зрения (рис. 10), заметим, что воспринимаемое глазом относительно светлое место и область полусветов и полутеней перемещаются подобно тому, как это наблюдалось на цилиндре.
«Легенда о Зеленом рыцаре»: фильм-аттракцион погружения в Средневековье — Афиша Plus — Новости Санкт-Петербурга
Фото: кадр из фильма «Легенда о Зеленом рыцаре»Поделиться«Легенда о Зеленом рыцаре» — фильм, на который стоит обратить внимание хотя бы по той причине, что его продвижением и международным прокатом занималась компания А24. Это уже само по себе гарантия попадания во все мыслимые списки, номинации и победы в них на следующих церемониях «Оскара» и «Глобуса», и, как следствие, «Легенда» еще достаточно долго будет определять вектор развития кино.
Хотя фильм и сам по себе — исключение из всех мыслимых правил, большая вещь с бюджетом в полтора десятка миллионов долларов, с кучей графики и вполне себе звездным актерским составом. Только при всем этом — основанная на средневековом рыцарском романе и полностью отданная на откуп радикальному автору-визионеру Дэвиду Лоури, мировую славу которому принесли эффектный ужастик «История призрака» и криминальная драма «Старик с пистолетом». Причем легенду Лоури переносит на экран в целости и сохранности, без каких-либо поправок и без соблюдения жанровых формальностей.
Только при всем этом — основанная на средневековом рыцарском романе и полностью отданная на откуп радикальному автору-визионеру Дэвиду Лоури, мировую славу которому принесли эффектный ужастик «История призрака» и криминальная драма «Старик с пистолетом». Причем легенду Лоури переносит на экран в целости и сохранности, без каких-либо поправок и без соблюдения жанровых формальностей.
Молодой сэр Гавейн, племянник легендарного рыцаря, короля Артура, однажды на Рождество совершил безумный и необдуманный поступок. Согласился поучаствовать в игре, которую предложил ему незваный гость на празднике — Зеленый рыцарь: тот призвал кого-либо из приближенных Артура нанести ему удар мечом. А год спустя прийти уже к нему самому — и получить ровно такой же удар. Гавейн вызвался в этой игре участвовать — и отсек чудищу голову. Теперь ему придется идти через горы, поля и леса навстречу своей судьбе — и верной гибели.
Лоури в «Легенде» собирает примерно весь опыт репрезентации Средневековья на экране — от «Невского» и «Грозного» через «Рублева» и «Седьмую печать» без остановок до «Игры престолов» и «Трудно быть богом».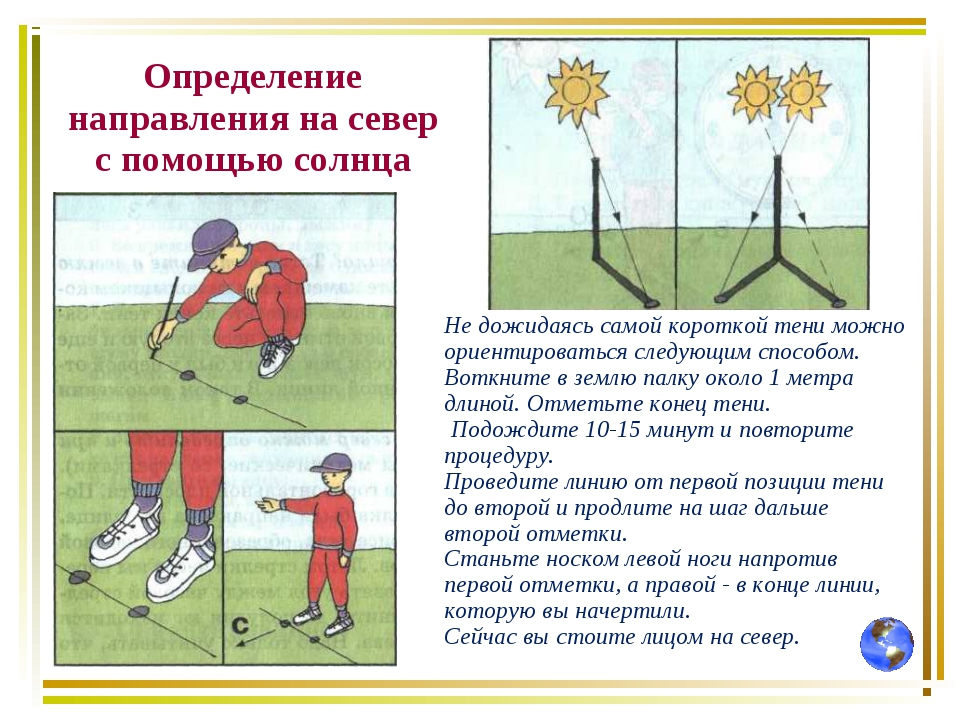 Графичность интерьерных сцен, игра света и тени тут вполне эйзенштейновские. Натурализм, грязь, туман — под стать «Рублеву» и последней ленте Германа. Мистика, фатализм — от Бергмана. Наконец, зрелищность и магнетизм — определенно растут из «Игры». Лоури все это собирает вместе, чтобы сделать вещь одновременно вязкую, атмосферную и невероятно зрелищную, во многом благодаря очень находчивым монтажным ходам и визуальному решению, придуманному постоянным соавтором режиссера и сценариста, оператором Эндрю Дрозом Палермо.
Графичность интерьерных сцен, игра света и тени тут вполне эйзенштейновские. Натурализм, грязь, туман — под стать «Рублеву» и последней ленте Германа. Мистика, фатализм — от Бергмана. Наконец, зрелищность и магнетизм — определенно растут из «Игры». Лоури все это собирает вместе, чтобы сделать вещь одновременно вязкую, атмосферную и невероятно зрелищную, во многом благодаря очень находчивым монтажным ходам и визуальному решению, придуманному постоянным соавтором режиссера и сценариста, оператором Эндрю Дрозом Палермо.
Автор: В Рейтинге/YouTube
Но настоящая новость «Легенды» — в том, что впервые на экране здесь удалось воспроизвести не только «запах», дух, атмосферу Средневековья, но и настоящую трагедию — в том виде и понимании, в каких она существовала и в Греции, и в Средние века. То есть как историю человека как игрушки в руках фатума, полностью подчиненной воле богов, обстоятельств, случайностей, высших сил. Герой трагедии — в данном случае Гавейн — совершенно бессилен перед тем, как развиваются события. Он не в силах принимать решения, он слаб — а за него это делают высшие силы.
Герой трагедии — в данном случае Гавейн — совершенно бессилен перед тем, как развиваются события. Он не в силах принимать решения, он слаб — а за него это делают высшие силы.
Во многом воспроизвести это все в современных условиях не получалось и не получается — ни в театре, ни в кино — из-за актеров. Не может же звезда, исполнитель роли Эдипа или Ореста, просто самоустраниться, ничего не делать, стереть себя! Лоури реализовать эту задачу удается — потому что у него есть козырь, звезда «Миллионера из трущоб» Дев Патель. У него Гавейн получается абсолютно безвольным и одновременно харизматичным — сочетание парадоксальней некуда. Он не принимает вызов Рыцаря — просто под Рождество решает отличиться перед дядей. Он и сам, вообще говоря, не рыцарь — о чем говорится на экране прямо. Даже в сцене объяснения с возлюбленной девушка произносит главные слова за него — руками, насильно открывая ему рот. Он не побеждает врагов, которых встречает: они легко с ним расправляются и бросают на верную смерть.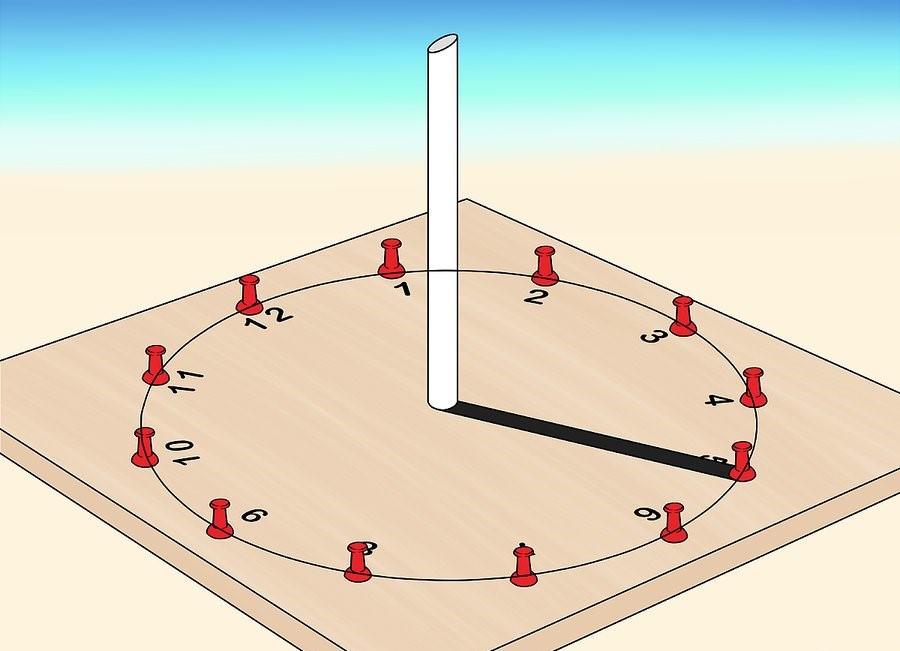 А от гибели его спасает воля небесной заступницы, святой девы Винифреды. Он никого не побеждает и ни с кем толком не сражается — все само собой происходит, без его ведома. Только Пателю удается все это сыграть так, что язык не повернется называть Гавейна трусом, хотя сам по себе сюжет к этому абсолютно располагает.
А от гибели его спасает воля небесной заступницы, святой девы Винифреды. Он никого не побеждает и ни с кем толком не сражается — все само собой происходит, без его ведома. Только Пателю удается все это сыграть так, что язык не повернется называть Гавейна трусом, хотя сам по себе сюжет к этому абсолютно располагает.
Актеры вообще творят в «Легенде» чудеса не хуже своих персонажей: Алисия Викандер играет сразу двух героинь — возлюбленную Гавейна и колдунью-соблазнительницу, встреченную им на пути к верной смерти. Джоэл Эдгертон внезапно вводит в сюжет (присутствующую и в поэме) гомосексуальную линию — и делает это максимально легко и изящно. Юный ирландец Барри Кеоган создает пугающе точный и достоверный образ мелкого бандита с большой дороги, жуткого кривляки-путаника.
Но, в конечном итоге, все это — и визуальная отточенность, и натурализм, и магия, и точность по отношению к пониманию рока, судьбы — направлены на достижение одной цели: создание эффекта полного присутствия.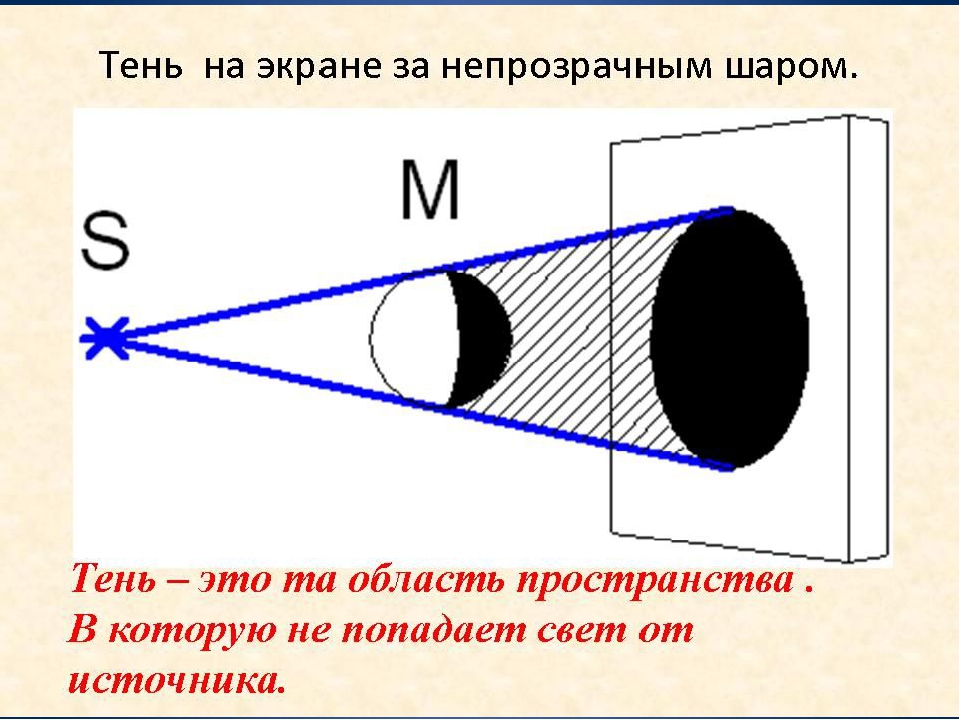 До сих пор в Средние века авторы погружали ограниченное число зрителей. Лоури смог превратить этот эффект присутствия в аттракцион, доступный миллионам. Что это, если не чудо и не магия?
До сих пор в Средние века авторы погружали ограниченное число зрителей. Лоури смог превратить этот эффект присутствия в аттракцион, доступный миллионам. Что это, если не чудо и не магия?
Иван Чувиляев, специально для «Фонтанки.ру»
Фото: кадр из фильма «Легенда о Зеленом рыцаре»Измените размер тени!
Ключевые концепции
Физика
Оптика
Свет
Тень
Введение
Хэллоуин почти здесь, и за каждым углом, кажется, таится жуткая тень! К счастью, это все, что они есть на самом деле — просто тени, которые являются частью декораций, созданных, чтобы вызвать у вас острые ощущения во время трюка или угощения. Но откуда берутся эти тени и как некоторые из них могут быть такими огромными? Сделайте это задание и узнайте, как создать самую большую и самую страшную тень из всех!
Фон
Вам нужен какой-то источник света для создания тени.Это может быть солнышко, лампа или фонарик. Все источники света излучают световые волны, которые удаляются от них. В оптике, которая представляет собой особую область физики, излучаемый свет моделируется как прямая линия, называемая световым лучом, которая указывает направление, в котором распространяется свет.
Все источники света излучают световые волны, которые удаляются от них. В оптике, которая представляет собой особую область физики, излучаемый свет моделируется как прямая линия, называемая световым лучом, которая указывает направление, в котором распространяется свет.
Чтобы отбрасывать тень, вам нужен объект, который может блокировать световые лучи. Не каждый объект на это способен. Некоторые материалы пропускают свет, тогда как другие блокируют только его часть. Объекты, способные блокировать весь свет, называются непрозрачными и образуют тень.Вам также понадобится большая поверхность, такая как стена или экран, на которой вы можете сделать тень видимой.
Как изменить размер тени? Чем ближе объект к источнику света, тем большую тень он отбрасывает. Это связано с тем, что объект, расположенный ближе к источнику, будет блокировать большую площадь света, увеличивая размер его тени. Попробуйте сами в этом занятии!
Материалы
- Две измерительные ленты
- Лента прозрачная
- Непрозрачные предметы, блокирующие свет, например чашка, игрушечная машинка или мяч
- Фонарик
- Стол
- Светлая стена
- Затемненное рабочее пространство
- Бумага
- Ручка
Подготовка
- Поставьте стол рядом со светлой стеной.
- Приклейте первую рулетку к столу с нулевой отметкой прямо у стены.
- Выберите непрозрачный объект, способный полностью блокировать световые лучи от источника света. Он не должен быть слишком большим или маленьким.
- Положите фонарик на стол так, чтобы он совпадал с рулеткой, обращенной к стене. Он должен располагаться на расстоянии 50 сантиметров (20 дюймов) от стены.
- Приглушите свет в комнате, чтобы было достаточно темно, чтобы можно было видеть четкие тени на стене.

Процедура
- Включите фонарик и направьте его на стену. Что вы видите на стене, когда включаете свет? Как меняется внешний вид стены при включении света?
- Выключите фонарик, но не перемещайте его. Возьмите предмет и поместите его рядом с фонариком на расстоянии 25 сантиметров (10 дюймов). Затем переместите его к стене, пока он не окажется в 20 сантиметрах (восьми дюймах) от стены. Как вы думаете, что вы увидите, когда включите свет?
- Включите свет и посмотрите на стену. Создает ли объект, помещенный на стол, тень? Вы можете объяснить, почему или почему нет?
- Переместите объект прямо между стеной и фонариком, чтобы он находился поверх рулетки. Поместите его на отметку 20 сантиметров (восемь дюймов) измерительной ленты. Как изменится тень при перемещении объекта?
- Включить свет. Что вы видите на стене на этот раз? Какую форму имеет тень? Если есть тень, возьмите вторую рулетку, измерьте высоту тени от поверхности стола до его верха и запишите ее размер на листе бумаги. Насколько велика тень?
- После измерения высоты тени переместите объект ближе к стене вдоль измерительной ленты, пока он не достигнет отметки 10 сантиметров (четырех дюймов). Затем снова измерьте высоту тени и запишите ее размер. Как изменяется размер тени, когда вы перемещаете ее дальше от источника света? Вы замечаете какие-либо другие отличия помимо размера?
- Переместите объект ближе к фонарику и поместите его на отметке 40 сантиметров (16 дюймов) на рулетке. Опять же, измерьте и запишите высоту тени. Тень становится меньше или больше, когда вы помещаете объект ближе к источнику света?
- Посмотрите свои результаты на листке бумаги.Если хотите, вы можете построить график, показывающий расстояние от источника света по оси x и размер тени по оси y. Как размер тени зависит от расстояния объекта от источника света? Вы можете объяснить свои результаты?
- Дополнительно: Поиграйте с разными предметами. Выбирайте разные материалы или разные размеры. Или создавайте свои собственные формы! Все ли они образуют тень? Почему или почему нет?
- Дополнительно: Добавьте второй источник света, поместив два фонарика перед стеной. Как выглядят тени от предметов, которые вы помещаете между фонариками и стеной? Чем они отличаются от теней, использующих только один источник света?
- Дополнительно: Попробуйте направить фонарик на объект под разными углами. Как угол меняет вид тени?
 Создает ли объект, помещенный на стол, тень? Вы можете объяснить, почему или почему нет?
Создает ли объект, помещенный на стол, тень? Вы можете объяснить, почему или почему нет?  Опять же, измерьте и запишите высоту тени. Тень становится меньше или больше, когда вы помещаете объект ближе к источнику света?
Опять же, измерьте и запишите высоту тени. Тень становится меньше или больше, когда вы помещаете объект ближе к источнику света?  Как угол меняет вид тени?
Как угол меняет вид тени? Наблюдения и результаты
Удалось ли вам изменить размер тени объекта? Прежде чем вы смогли изменить размер тени, вам нужно было сначала ее сгенерировать.Вы, вероятно, не заметили тени, когда поместили объект рядом с фонариком, а не прямо на его пути света. Это связано с тем, что свет распространяется по прямой линии, и поскольку объект не находился на прямом пути света, он не мог блокировать свет от своего источника. Однако после того, как вы поместили объект прямо на путь, вы должны были увидеть тень на стене, которая имела ту же форму, что и объект. На этот раз непрозрачный объект смог заблокировать свет от источника света, создав темную тень на стене.
Вы должны были заметить, что размер тени уменьшается, когда вы перемещаете объект дальше от источника света, и увеличивается, когда вы приближаете его. Когда объект приближается, вы блокируете гораздо большую часть света от источника, что увеличивает размер тени. Теперь вы знаете, как заставить жуткие тени на Хэллоуин расти и уменьшаться!
Теперь вы знаете, как заставить жуткие тени на Хэллоуин расти и уменьшаться!
Больше для изучения
Свет и тени, от Toppr
Свет действительно движется по прямым линиям, от Университета Лестера
Эскиз Rad Shadow, от Scientific American
Science Activity for All Ages !, от Science Buddies
Это мероприятие предоставлено вам в сотрудничестве с Science Buddies
(PDF) Определение географического положения сцен изображений на основе длин теней от объектов
24
16.P. KaewTraKulPong и R. Bowden, Улучшенная модель адаптивной фоновой смеси
для отслеживания в реальном времени с обнаружением теней, представленная на 2-м Европейском семинаре по усовершенствованным системам видеонаблюдения
, AVBS01, 2001.
17. S. Lefèvre, L Мерсье, В. Тибергиен и Н. Винсент, Цветное изображение с несколькими разрешениями
«Сегментация, применяемая для извлечения фона в изображениях вне помещения», представленная на IS&T
Европейской конференции по цвету в графике, изображении и зрении, 2002 г.
18. Ю. Ли, Т. Сасагава и П. Гонг, Система обнаружения и удаления теней
для аэрофотосъемки города с высоким разрешением, представленная на XX Конгрессе ISPRS, 2004.
19. Дж. М. Ван, YC Chung, CL Chang и SW Chen, Обнаружение и удаление теней
для изображений трафика, представленное на Международной конференции IEEE по сетям, зондированию
и контролю, 2004.
20. FE Sandnes, «Сортировка фотографий из отпуска без GPS : Чего мы можем ожидать от
тегов геопространственных изображений на основе содержимого? »Лекционные заметки по информатике, т.
5879, №, с. 256-267, 2009.
21. Ю.-Т. Чжэн, З. Мин, С. Ян, Х. Адам, У. Буддемайер, А. Биссакко, Ф. Брюхер, Т.-С.
Чуа и Х. Невен, «Путешествие по миру: создание механизма распознавания ориентиров в масштабе сети
» в трудах конференции IEEE по компьютерному зрению и распознаванию образов
(CVPR 2009), стр. 1085-1092 , 2009.
22. А. Треби-Олленну, Т. Хантсбергер, Ю. Ченг и Е. Т. Баумгартнер, «Проектирование и анализ
солнечного датчика для определения абсолютного курса планетарного марсохода., «IEEE
Транзакции по робототехнике и автоматизации, том 17, № 6, стр. 939-947, 2001.
23. Н. Джейкобс, С. Саткин, Н. Роман, Р. Спейер и Р. Плесс, «Геолокация статических камер»,
в трудах 11-й Международной конференции IEEE по компьютерному зрению (ICCV
2007), стр. 1-6, 2007.
24. Н. Джейкобс, Н. Роман и Р. Плесс, «На пути к полностью автоматическому геолокации и гео-
ориентации статических наружных камер», в трудах семинара IEEE по
Приложениям компьютерного зрения, стр.1-6, 2008.
25. Ф. Э. Санднес, «Где была сделана эта фотография? Получение географической информации из
коллекций изображений на основе атрибутов временного воздействия », Multimedia Systems, 2010
(принято).
26. Ф. Е. Санднес, «Неконтролируемая и быстрая континентальная классификация цифровых изображений
коллекций с использованием времени», в Proceedings of ICSSE 2010, IEEE CS P ress, 2010 (до
).
27. Йо-Пин Хуанг, Цун-Вэй Чанг, Йен-Рен Чен и Фроде Эйка Санднес, «Система распознавания номерных знаков в реальном времени на основе распространения информации A Back
», Международный журнал
«Распознавание образов и искусственный интеллект», Vol.22, No. 2, pp. 233-251, 2008.
28. FE Sandnes, «Простая стратегия на основе контента для оценки географического
местоположения веб-камеры», Proceedings of PCM2010, Lecture Notes on Computer
Наука, 2010 (в печати).
29. Вэй Хуанг, Ян Гао и Кап Лук Чан, Обзор поиска изображений на основе регионов,
Журнал систем обработки сигналов, DOI: 10.1007 / s11265-008-0294-3.
теневой фонарный столб (проблема, связанная с тарифами) — Матено.com
Расценки, связанные с исчислением Проблема:
Фонарный столб отбрасывает тень идущего человека.
Мужчина ростом 1,8 метра уходит от фонарного столба высотой 6,0 метра со скоростью 1,5 м / с. Свет наверху столба отбрасывает тень перед человеком. С какой скоростью движется «голова» его тени по земле?
Calculus Solution
[Прокрутите вниз, чтобы увидеть текстовую (не видео) версию решения.]
Чтобы решить эту проблему, мы будем использовать нашу стандартную 4-шаговую стратегию решения проблем связанных ставок.
1. Нарисуйте картину физического состояния.
См. Рисунок. Мы называем расстояние между столбом и «головой» тени человека $ \ ell $, а расстояние между человеком и столбиком — x .
2. Напишите уравнение, связывающее интересующие количества.
Нам дано, что человек уходит от столба со скоростью $ \ dfrac {dx} {dt} = 1,5 $ м / с. Мы ищем скорость, с которой движется «голова» тени человека, которая равна $ \ dfrac {d \ ell} {dt} $.Таким образом, нам нужно каким-то образом связать $ \ ell $ с x , чтобы затем мы могли установить связь между их производными по времени.
В этой проблеме есть тонкость, которая обычно остается без внимания: здесь мы сосредотачиваемся на $ \ ell $ и $ \ dfrac {d \ ell} {dt} $, потому что $ \ ell $ — это расстояние от кончика тени до Пост стационарный . Мы не исследуем длину самой тени (обозначенной $ \ ell — x $ на левом рисунке ниже), потому что эта длина относится к ступням человека, которые также движутся.Таким образом, мы получили бы другой ответ, если бы вычислили скорость, с которой меняется серая тень. В этой задаче нам предлагается определить скорость движения головы тени по (неподвижной) земле, поэтому лучше всего проводить измерения с точки, которая также не движется, а именно со столба. Поэтому мы сосредотачиваемся на $ \ ell $ и стремимся вычислить $ \ dfrac {d \ ell} {dt} $.
B. Для построения уравнения вы, вероятно, воспользуетесь. . . подобные треугольники.
На рисунке выше мы разделили два треугольника.Обратите внимание, что углы в двух треугольниках идентичны, и, следовательно, они похожи. Соотношение их соответствующих компонентов, таким образом, также одинаково. Следовательно, отношение их оснований $ \ left (\ dfrac {\ ell — x} {\ ell} \ right) $ равно отношению их высот $ \ left (\ dfrac {1.8 \, \ text {m}} {6.0 \, \ text {m}} \ right) $:
\ begin {align *}
\ dfrac {\ ell — x} {\ ell} & = \ frac {1.8 \, \ text {m}} { 6.0 \, \ text {m}} \\ [12px]
& = 0,30 \\ [12 пикселей]
\ ell — x & = 0,30 \ ell \\ [12px]
\ ell — 0,30 \ ell & = x \\ [12px]
(1 — 0.30) \ ell & = x \\ [12px]
0,70 \ ell & = x
\ end {align *}
3. Возьмите производную по времени от обеих сторон уравнения.
\ begin {align *}
\ dfrac {d} {dt} (0.70 \ ell) & = \ dfrac {d} {dt} (x) \\ [12px]
0,70 \ dfrac {d \ ell} {dt} & = \ dfrac {dx} {dt}
\ end {align *}
4. Найдите необходимое количество.
Мы ищем $ \ dfrac {d \ ell} {dt} $:
\ begin {align *}
0.70 \ dfrac {d \ ell} {dt} & = \ dfrac {dx} {dt} \\ [12px]
\ dfrac {d \ ell} {dt} & = \ frac {1} {0.70} \ dfrac {dx} {dt} \\ [12px]
& = \ frac {1} {0.70} \ left (1.5 \, \ tfrac {\ text {m}} {\ text {s}} \ right) \\ [12px]
& = 2.1 \, \ tfrac {\ text {m}} {\ text {s}} \ quad \ cmark
\ end {align *}
Вернуться к проблемам связанных ставок
Требуется доступ к всем из наши проблемы исчисления и решения? Купите полный доступ сейчас — это быстро и просто!
Анализ индуцированных ответов гамма-диапазона ЭЭГ в исходном пространстве головного мозга
Abstract
Увеличение индуцированных откликов в гамма-диапазоне (iGBR; колебания> 30 Гц), вызываемых знакомыми (значимыми) объектами, хорошо установлено в исследованиях электроэнцефалограммы (ЭЭГ).Считается, что это частотно-зависимое изменение в разных местах указывает на динамическое формирование локальных нейронных сборок во время активации репрезентаций корковых объектов. Поскольку аналитически увеличение мощности — это всего лишь свойство одного местоположения, фазовая синхронность была введена для исследования формирования крупномасштабных сетей между пространственно удаленными участками мозга. Однако классическая фазовая синхронность выявляет симметричные попарные корреляции и не подходит для выявления направленности взаимодействий.Здесь мы исследовали нейронный механизм обработки визуальных объектов с помощью анализа направленной связи, выходящего за пределы участков записи, а скорее оценивая направленность колебательных взаимодействий между областями мозга напрямую. Это исследование является первым, кто определяет направленность осциллирующих взаимодействий мозга в исходном пространстве во время распознавания человеческого объекта, и предполагает, что знакомые, но не незнакомые объекты участвуют в широко распространенном взаимном потоке информации. Направленность коркового информационного потока рассчитывалась на основе установленной меры связи Грейнджера-причинности (частичная направленная когерентность; PDC) с использованием авторегрессионного моделирования.Для сравнения с предыдущими исследованиями связи, в которых отсутствовала информация о направлении, был применен анализ фазовой синхронизации с использованием вейвлет-разложения сигналов. Как авторегрессионное моделирование, так и вейвлет-анализ выявили увеличение iGBR во время представления знакомых объектов по сравнению с незнакомыми элементами управления, которое было локализовано в нижневисочных, верхних теменных и лобных областях мозга посредством реконструкции распределенного источника. Многомерный анализ PDC оценил каждое возможное направление взаимодействия мозга и выявил широко распространенную реципрокную передачу информации во время обработки знакомых объектов.Напротив, незнакомые объекты влекут за собой небольшое количество однонаправленных соединений, сходящихся к теменным областям. Учитывая направленность мозговых взаимодействий, текущие результаты могут указывать на то, что успешная активация представлений об объектах реализуется посредством взаимной (прямой и обратной) передачи информации колебательных связей между удаленными, функционально специфическими областями мозга.
Образец цитирования: Supp GG, Schlögl A, Trujillo-Barreto N, Müller MM, Gruber T. (2007) Направленный корковый информационный поток во время распознавания человеческого объекта: анализ индуцированных ответов гамма-диапазона ЭЭГ в пространстве источников мозга.PLoS ONE 2 (8): e684. https://doi.org/10.1371/journal.pone.0000684
Академический редактор: Хьюберт Мансвельдер, Университет Фрие, Амстердам, Нидерланды
Поступила: 10 апреля 2007 г .; Принята к печати: 28 июня 2007 г .; Опубликовано: 1 августа 2007 г.
Авторские права: © 2007 Supp et al. Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Финансирование: Эта работа была частично поддержана постдокторской стипендией Общества Макса Планка при G.S. и грантом Deutsche-Forschungsgemeinschaft (DFG).
Конкурирующие интересы: Авторы заявили, что никаких конкурирующих интересов не существует.
Введение
Участие гамма-колебаний в активации репрезентации кортикальных объектов является одним из важных результатов исследований электроэнцефалограммы (ЭЭГ) и магнитоэнцефалограммы (МЭГ) человека.Что касается распознавания визуальных объектов, в нескольких исследованиях сообщалось о модуляции индуцированных ответов гамма-диапазона (iGBR) знакомым стимулом (например, [1] — [3]). Такие iGBR были определены как электрическая активность мозга, характеризующаяся колебательными всплесками выше 30 Гц и дрожанием латентности от одного испытания к другому [4], [5]. Представление знакомых объектов приводит к более сильному увеличению iGBR по сравнению с незнакомыми элементами управления. Это усиление появляется примерно через 250 мс после появления стимула, в зависимости от момента времени идентификации объекта [6].Основываясь на сообщениях об внутричерепных сигналах мозга, а также на макроскопических записях скальпа, варьирующийся уровень гамма-мощности кажется показателем формирования локальных нейронных сборок, реализующих интеграцию признаков в процессе идентификации объекта [7] — [9].
В принципе, сигнал, регистрируемый одним ЭЭГ-электродом, представляет собой пространственное суммирование потенциалов локального поля (LFP) большой популяции нейронов, в то время как локальная синхронизация их активности приводит к частотно-зависимому увеличению мощности на этом электроде [10 ], [11].Таким образом, изменения мощности сами по себе не могут отражать формирование крупномасштабных сетей, которые основываются на колебательных взаимодействиях между пространственно удаленными кортикальными популяциями [12], [13]. Для этого требуются меры связи, такие как анализ фазовой синхронизации (PLA), который был введен на основе вейвлет-разложения для измерения синхронизации на больших расстояниях [14], [15]. Путем применения PLA к iGBR было выявлено большое количество фазовых синхронизаций между электродами кожи головы для знакомых по сравнению с незнакомыми объектами [16] — [18].Поскольку фазовая синхронизация между электродами кожи головы может быть затруднена артефактами объемной проводимости, важно знать, что записи внутричерепной ЭЭГ из коры головного мозга человека продемонстрировали физиологическую правдоподобность фазовой синхронизации. В частности, однозначные физиологические доказательства формирования крупномасштабных взаимодействий между распределенными структурами мозга посредством дальнодействующей гамма-синхронизации были получены из внутричерепных записей у людей (см. Обзор [19]).
Для того, чтобы выйти за рамки анализа связи между участками записи на коже черепа и непосредственно оценить колебательные взаимодействия между областями мозга, PLA был успешно применен в пространстве источников [20].Вкратце, генераторы iGBR могут быть восстановлены с помощью электромагнитной томографии с переменным разрешением, VARETA [21], [22]. Используя этот подход, iGBR, связанные с представлением кортикальных объектов, были локализованы в височных, лобных и теменных областях мозга [20], каждая из которых, как сообщается, играет определенную функциональную роль в корковой сети, опосредующей распознавание визуальных объектов [23] — [25].
Здесь мы превзошли PLA по усовершенствованной методике частичной направленной когерентности (PDC), основанной на многомерном авторегрессионном моделировании.В отличие от PLA, многомерный подход PDC измеряет, как несколько позиций «эффективно» связаны (т. Е. Выявляет исключительно прямые связи путем корректировки косвенных влияний), а не просто описывает парную синхронность. В частности, PDC фиксирует направление информационного потока, используя концепцию причинности по Грейнджеру в частотной области [26], [27]. Многофакторный анализ PDC оценивает каждое возможное направление взаимодействия мозга и выявляет влияния, принимаемые или передаваемые каждой областью мозга, и, следовательно, могут быть обнаружены даже влияния обратной связи.Поскольку обратная связь, по-видимому, играет центральную роль в нейронной коммуникации, особенно в сильно взаимосвязанных структурах мозга, таких как кора головного мозга, потенциальная выгода от применения анализа направленной связи становится очевидной.
Целью настоящего исследования является, во-первых, выяснить, подходят ли авторегрессионное моделирование и вейвлет-анализ для обнаружения iGBR, вызываемых визуально представленными объектами. Во-вторых, мы стремились оценить паттерн связи между корковыми источниками головного мозга, лежащими в основе этих индуцированных гамма-колебаний, путем расчета обоих показателей связи, PLA и PDC.В частности, мы стремились выйти за рамки простых изменений фазовой синхронизации, идентифицируя динамическую мозговую сеть направленного информационного потока в активированных репрезентациях корковых объектов.
Результаты
Десяти испытуемым были представлены изображения знакомых и незнакомых объектов (см. Рисунок 1 для некоторых примеров изображений) и их попросили классифицировать их, в то время как сигналы ЭЭГ были записаны по 128 каналам и сохранены для автономного анализа. Поведенческие данные выявили около 97 процентов правильных ответов, т.е.е. участники правильно классифицируют визуально представленное графическое изображение как знакомое (значимое) или незнакомое (бессмысленное). Низкий процент ошибок подчеркивает применимость существующей парадигмы в выявлении мозговых процессов, связанных с распознаванием объектов.
Авторегрессионное моделирование: изменение спектральной мощности — электродное пространство
Спектральные изменения, основанные на применяемой авторегрессионной модели (AR) в диапазоне iGBR, представлены на рисунках 2A и 2B. Графики время-частота (TF) с поправкой на исходный уровень, усредненные для 10 субъектов и 22 электродов (сгруппированных для формирования интересующей теменно-затылочной области: см. Рисунок 3), изображены отдельно для каждого состояния.Спектральная мощность, скорректированная по базовой линии, вызванная представлениями знакомых объектов, показывала четкий пик во временном окне от 150 до 400 мс после начала стимула в диапазоне частот от 40 до 90 Гц. Хотя увеличение присутствовало даже за пределами 90 Гц, мы ограничили наш анализ указанным выше диапазоном, чтобы сравнить результаты с вейвлет-подходом. Статистический анализ выявил более высокое увеличение iGBR для знакомых, чем для незнакомых объектов (t (9) = 12,4; p <0,0001). Карта разностной топографии этого эффекта (знакомые минус незнакомые) изображена на рисунке 3А.Можно оценить широкое заднее распределение с максимумом в местах теменного и затылочного электродов.
Рис. 2. Индуцированные спектральные изменения в диапазоне гамма-диапазона, представленные графиками время-частота (TF) для каждого состояния (знакомого и незнакомого).
Графики TF A и B основаны на авторегрессионном моделировании (AR), C и D — на вейвлет-анализе Морле. Две вертикальные черные линии указывают временной интервал индуцированного пика гамма-диапазона (150–400 мс после начала стимула), который используется для дальнейшего анализа.Все графики TF были скорректированы до исходного уровня, усреднены по субъектам и двадцати двум теменно-затылочным электродам ( cf . Рисунок 3).
https://doi.org/10.1371/journal.pone.0000684.g002
Вейвлет-анализ: изменение спектральной мощности — электродное пространство
На рис. 2C и 2D изображены TF-графики, скорректированные по базовой линии, на основе вейвлетов для каждого экспериментального условия, усредненные по всем субъектам, и по всем электродам центрального-заднего регионального среднего. Увеличение IGBR, вызванное знакомыми объектами, выявило четкий пик во временном окне от 150 до 400 мс после начала стимула в диапазоне частот от 40 до 90 Гц (рис. 2C).Это увеличение значительно выше для знакомых, чем для незнакомых объектов (t (9) = 6,2; p <0,001). Распределение топографической разницы пика iGBR (знакомое минус незнакомое) показано на рисунке 3B. Эффект показывает широкое распределение в задней части скальпа с максимумом на теменных и затылочных участках электродов. Важно отметить, что сходящиеся топографии эффекта знакомства получаются с помощью каждого метода анализа, вейвлет-разложения и авторегрессионного моделирования. Учитывая максимум на теменно-затылочных электродах и отсутствие фронтального эффекта в iGBR, мы отобразили карты разницы топографии с задней точки зрения.
Рис. 3. Грандиозные средние сферически-сплайновые интерполированные топографии эффекта состояния (знакомые минус незнакомые), выявленные AR (авторегрессионным) моделированием (A) и вейвлет-анализом (B).
Обе карты основаны на индуцированном пике гамма-диапазона от 150 до 400 мс после начала стимула. Электроды, используемые для графиков TF и статистического анализа, обведены черными линиями.
https://doi.org/10.1371/journal.pone.0000684.g003
Обратите внимание, что представления TF на основе вейвлетов показывают более точный временной ход iGBR, чем спектральные результаты AR, поскольку моделирование AR предполагает достаточно длительный окно данных для анализа (подробности см. в разделе «Материалы и методы»).Кроме того, пик iGBR на TF-графике на основе AR (72 Гц) показывает смещение относительно смещения, обнаруженного с помощью вейвлет-анализа (около 58 Гц). Однако это не указывает на дифференциальные пиковые частоты, поскольку спектральная плотность мощности, полученная из параметров AR, характеризуется центральной частотой (то есть 72 Гц) и ее граничными частотами (+/- 21 Гц). Пик, полученный с помощью вейвлет-анализа, находится в пределах этого диапазона, определяемого центральной частотой и этими пределами. Таким образом, оба измерения показали сопоставимые результаты.
Передача информации: частичная направленная когерентность (PDC) в пространстве источников
На рис. 4A и 4B показаны результаты анализа PDC между четырьмя областями коры (интересующие области; ROI) для знакомых (A) и незнакомых (B) объектов во временном окне от 150 до 400 мс после начала стимула. ROI были определены на основе статистико-параметрических карт (SPM) эффекта состояния пика iGBR (см. Материалы и методы). Центры тяжести для этих четырех участков мозга перечислены в таблице 1 и изображены как точки значительных активаций в соответствующем анатомическом месте.Паттерн значимых значений PDC, рассчитанный между исследуемыми участками мозга, выявил количественные и анатомические различия в передаче информации при представлении знакомых и незнакомых объектов. Значимые значения PDC между генераторами iGBR указаны стрелками, которые представляют направление передачи информации (p <0,001).
Рис. 4. Томографии и паттерны связи индуцированного пика гамма-диапазона, вызванного знакомыми и незнакомыми стимулами (150–400 мс после начала стимула).
В SPM значимые различия (знакомые и незнакомые) отмечены красным. Были определены следующие области интереса (ROI; cf . Таблица 1): ITG (нижне-височная извилина, слева), SPL (верхняя теменная доля, двусторонняя), MFG (средняя лобная извилина, справа). Стрелки в A и B представляют направление передачи информации между областями интереса и были нарисованы только в том случае, если значения PDC были значимыми (p <0,001). Линии на C и D показывают значительное увеличение значений фазовой синхронизации (p <0.001) рассчитывается между всеми ROI.
https://doi.org/10.1371/journal.pone.0000684.g004
Таблица 1. Координаты MNI (Монреальский неврологический институт) и анатомические описания центров тяжести всех областей интереса (ROI), связанных с эффектом состояния (знакомый против незнакомого ) на индуцированный ответ гамма-диапазона (150–400 мс после начала стимула).
https://doi.org/10.1371/journal.pone.0000684.t001
Количество значимых значений PDC во время презентаций знакомых объектов превышает количество значимых значений для бессмысленного состояния (десять против трех).Кроме того, при обработке знакомых объектов сеть передачи информации является двунаправленной. Каждая область, передающая информацию в определенный участок мозга, также получает информацию от него. Напротив, незнакомые объекты вызывают меньшее количество значимых связей PDC, все они однонаправлены и сходятся к теменным областям мозга (рис. 4B). Фактический ход значений PDC от всех значимых взаимодействий с мозгом представлен на рисунке 5 для каждого состояния отдельно.
Чтобы исследовать согласованность сообщаемых связей и уточнить, в какой степени указанные связи зависят от определенного применяемого статистического порога, мы повторили статистический анализ с несколькими разными пороговыми значениями.
Рис. 5. Средние значения частичной направленной когерентности (PDC), вычисленные по всем значимым парам областей интереса для каждого условия (сплошная черная линия: знакомо; сплошная пурпурная линия: незнакомо).
Пунктирные линии представляют соответствующие стандартные ошибки значений PDC.
https://doi.org/10.1371/journal.pone.0000684.g005
Результаты, приведенные в таблице 2, показывают, что идентичные модели связывания (с точки зрения количества и задействованных пар сцепления) были получены между p <0,001 и p <0,02. , что предполагает стабильность в значительном диапазоне статистических пороговых значений. Фактически, те паттерны связи, которые появлялись на нашем первоначально выбранном пороге значимости (т.е. p <0,001), оставались неизменными до p-уровня 0,02. Только с порогом p <0.05 дополнительные подключения становятся важными в обоих условиях. Однако, чтобы учесть значительное количество протестированных сравнений (с 4 позициями, дающими 4 × 3 = 12 возможных комбинаций) и избежать ложных положительных результатов, кажется необходимым применить пониженный порог (в нашем случае: p <0,001) для статистического анализа результатов связи (аналогичный подход см. в [28] - [30]). Согласно методу коррекции Бонферрони факт множественных сравнений необходимо скорректировать с помощью пониженного значения p, т.е.е. p <0,004 (0,05 / 12), порог, который выявил идентичные модели связи, как показано на рисунке 4. Таким образом, структура связей, представленная здесь, выдерживала строгую статистическую коррекцию.
Дальняя синхронизация: анализ фазовой синхронизации (PLA) в пространстве источника
На рис. 4C и 4D показаны результаты анализа фазовой синхронизации (PLA) между всеми четырьмя областями интереса (см. Таблицу 1) для знакомых и незнакомых объектов во временном окне от 150 до 400 мс после начала действия стимула.Для представлений знакомых объектов значительная фазовая синхронизация (т. Е. P <0,001) была установлена между большинством всех возможных комбинаций ROI (т. Е. Четырьмя из шести возможных связей). Напротив, незнакомые объекты были связаны с гораздо менее значимыми значениями фазовой синхронизации, в результате чего значимой оставалась только одна пара. Схема связывания PLA оказалась последовательной в диапазоне различных порогов значимости, что продемонстрировано результатами, приведенными в таблице 2.
Для обоих экспериментальных условий мы оценили фазовые углы, при которых произошла синхронизация, и обнаружили, что в известном случае они были сосредоточены на среднем значении 0.2 рад (стандартная ошибка: 0,1 рад). В незнакомом случае распределение было шире (среднее значение = 0,01; стандартная ошибка 0,2 рад). Поскольку артефактное влияние объемной проводимости вызывает только фазовую синхронизацию с нулевым запаздыванием по фазе, наши модели фазовой синхронизации для представления знакомых объектов не могут быть объяснены исключительно объемной проводимостью.
Обсуждение
Природные объекты состоят из множества функций нижнего и верхнего уровня, которые кортикально представлены в рассредоточенных областях мозга. Синхронизированная осцилляторная нейронная активность в гамма-диапазоне частот (> 30 Гц) рассматривается как вероятный механизм интеграции этих характеристик в когерентное восприятие (обзоры см. [2], [3], [31]).Предыдущие исследования показали, что интеграция функций стимула активирует соответствующее содержание памяти (подробное обсуждение см., Например, в [9], [32]). Функциональная связь между сенсорными процессами и памятью была установлена эмпирическими исследованиями (см. Некоторые обзоры: [33] — [35]) и подробным описанием того, как обработка сенсорных признаков приводит к появлению высокоуровневого представления (семантического features) был предложен недавно [36].
В то время как предыдущие публикации успешно продемонстрировали синхронность между реконструированными источниками генераторами индуцированных откликов в гамма-диапазоне, iGBR [32], настоящее исследование было разработано, чтобы сделать еще один важный шаг вперед.В частности, мы намеревались раскрыть причинную связь между мозговыми источниками iGBR, используя меру частично направленной когерентности (PDC), которая основана на многомерном авторегрессионном моделировании. Кроме того, мы намеревались сопоставить эти результаты с «обычными» результатами фазовой синхронизации на основе вейвлетов и проверить функциональную достоверность наших результатов, связав сеть направленных взаимодействий мозга с экспериментальными данными из других методологий.
Чтобы вызвать устойчивые колебания в гамма-диапазоне, мы применили стандартную парадигму распознавания объектов, в которой представлены знакомые и незнакомые визуальные стимулы [1], [16], [20]. На уровне кожи головы оба метода (авторегрессионное моделирование и вейвлет-анализ) воспроизводили ранее сообщенное увеличение iGBR во время представления знакомых по сравнению с незнакомыми объектами [5], [16], [32]. Оба подхода показали сопоставимые результаты с точки зрения задержки (150–400 мс), топографии и частоты пика iGBR (на основе вейвлетов: 58 Гц и на основе AR: 72 Гц; подробности см. В разделе «Методы»).Временной диапазон iGBR хорошо согласуется с предыдущими исследованиями, использующими парадигму распознавания объектов, сообщая от 150 до 400 мс и 200–400 мс (начало после стимула), соответственно [1], [20]. В целом моделирование AR хорошо подходит для обнаружения индуцированных и переходных высокочастотных колебаний в ЭЭГ человека.
Что касается представленного томографического анализа, наша процедура была предложена и согласуется с несколькими исследованиями локализации источников ЭЭГ / МЭГ, в которых изучались нейрональные генераторы, лежащие в основе частотно-зависимых изменений мощности (например,грамм. [20], [37] — [39]). В частности, наши результаты согласуются с ранее описанными генераторами iGBR [20], [40], локализованными в четырех анатомически рассредоточенных областях коры головного мозга, между которыми был установлен плотный паттерн синхронности в ответ на знакомые объекты, анализируемые с помощью обычной фазовой синхронизации. анализ (PLA; [14]). Напротив, во время представления незнакомых объектов практически не было установлено какой-либо значительной фазовой синхронизации.
Шаблон причинной связи (PDC), связанный с обработкой знакомых объектов, напоминает результаты связывания на основе фазовой синхронизации (PLA) с точки зрения его общей связности.Не менее важно, что меньшее количество значимых связей для незнакомых объектов (по сравнению со знакомыми) отражается обеими мерами. Таким образом, в принципе, оба метода выявили очень сходящийся паттерн взаимодействия мозга во время распознавания объектов. Что касается зависимости результатов связывания от применяемого статистического порога, количество значимых связей указано в таблице 1 для диапазона нескольких пороговых значений. Схема подключения, показанная на рисунке 4 для обоих показателей, PDC и PLA, доказала свою идентичность перед лицом значительного диапазона применяемых статистических пороговых значений (между p <0.001 до p <0,02).
При сравнении результатов PDC и PLA в качественном смысле, паттерн подключения PDC для незнакомых стимулов отличается от паттерна, полученного с помощью PLA. Этот факт подчеркивает, что PDC не просто отражает случаи фазовой синхронизации, но, скорее, представляет собой методологически отличную меру, которая количественно определяет временные зависимости между сигналами мозга и, следовательно, оценивает влияния, получаемые или передаваемые каждой областью мозга. Таким образом, различия между схемами связи, полученными с помощью PDC и PLA, коренятся в том факте, что разные аспекты лежащих в основе сигналов отражаются в каждом измерении.В то время как PLA представляет собой симметричную меру (фазовых) отношений внутри пары сигналов, многомерная мера PDC была разработана для выявления временного приоритета, то есть причинной иерархии между действиями. Как важное последствие, всякий раз, когда существует обратная связь между сигналами, простые меры корреляции могут не улавливать такие зависимости, в то время как PDC был введен для преодоления этого ограничения и, в частности, должен отражать временные отношения обратной связи [26], [41]. Кроме того, PLA рассчитывается для каждой пары отдельно (двумерный анализ) и не делает различий между прямыми и косвенными (фазовыми) связями, так что оба типа отношений влияют на фактическое значение PLA.Напротив, многомерный подход PDC подходит для характеристики исключительно прямых зависимостей двух исследуемых сигналов. Выражаясь качественно, это возможно, поскольку любой сигнал, оказывающий общее влияние на исследуемое взаимодействие (исходящий от других сигналов в многомерном временном ряду), не принимается во внимание, то есть общие источники разделены или разделены, так что они не входить в определение значений PDC [42], [43]. Следовательно, значения PDC должны отражать, в частности, прямые взаимодействия — факт, который также называют «эффективной связью».
Направленность этих взаимодействий, извлеченная PDC, и их возможное значение будут рассмотрены после того, как мы выделим возможную функциональную роль идентифицированных областей мозга. В этом контексте мы также обсудим эмпирические данные из других исследований, подтверждающие функциональную правдоподобность ограниченного паттерна PDC, вызванного незнакомыми объектами.
Генераторы iGBR, связанные с репрезентацией объекта, были идентифицированы в левой нижней височной, правой префронтальной и двусторонней областях в верхней теменной области мозга.Подтверждающие данные исследований поражений, интракортикальных записей и функциональной нейроанатомии предполагают участие этих областей в обработке визуальных объектов. Нейрональные популяции в нижней височной коре, структуре мозга, которая, как известно, является частью вентрального зрительного потока, как было обнаружено, настроены на относительно сложные отношения между элементарными визуальными особенностями [25], [44], [45]. В нескольких исследованиях сообщалось, что фронтальная активация представляет собой облегчение сверху вниз во время распознавания объектов [23], [46] — [48].Верхняя теменная кора неоднократно была связана со связыванием признаков в том смысле, что особенности объекта нижнего уровня должны быть пространственно интегрированы, чтобы сформировать визуальный объект [24], [49], [50]. Эти отчеты соответствуют общей идее, согласно которой распознавание объектов является совместным процессом, возникающим в результате взаимосвязанного набора областей мозга (см. Обзор [51]). Такие кооперативные процессы, образующие функциональные сети, особенно подходят для исследования с помощью связанных мер, таких как анализ фазовой синхронизации (PLA) или частично направленная когерентность (PDC).Существующий паттерн PDC в ответ на знакомые изображения может отражать более интенсивную сеть взаимодействий между кортикальными областями, которая инициируется интеграцией функционально специализированных областей, связанных с репрезентацией объекта [15], [18], [20]. Важно отметить, что из-за свойства направленности измерения PDC эта сеть передачи информации реализуется исключительно посредством двунаправленных соединений. Фактически, этого результата следует ожидать с теоретической и функциональной точки зрения, поскольку временная координация инициируемых входом ответов и их интеграция в функционально согласованные сборки предположительно основаны на динамической распределенной группировке посредством итеративного повторного входа [13], [52] — [54].
И наоборот, небольшое количество значимых информационных потоков во время обработки бессмысленных объектов было односторонним, что, возможно, указывает на однонаправленную коммуникацию в том смысле, что одна сторона мозга представляет собой колебательный двигатель другой [13], [52], [55]. Ограниченное количество взаимодействий с мозгом может быть связано с тем, что представление не может быть активировано в областях, имеющих отношение к структурной интеграции характеристик объекта. Поскольку незнакомые объекты содержат функции более низкого уровня, аналогичные тем, что есть в наших знакомых объектах (например, низкие пространственные частоты), но не имеют значимой структурной информации, разреженные связи передачи информации, сходящиеся в теменных областях, могут отражать обработку этих характеристик изолированных объектов.В частности, фронтальная передача информации может происходить из-за влияния сверху вниз, которое, как предполагается, инициируется низкими пространственными частотами, также содержащимися в незнакомых стимулах [23], [47]. Активацию нижней височной коры, обеспечивающей вход в теменную кору, можно было ожидать, несмотря на сообщения о предпочтительных ответах этой структуры мозга на относительно сложные отношения между элементарными визуальными особенностями, в равной степени обеспечиваемыми незнакомыми объектами [25], [44].Функциональная правдоподобность наших результатов направленной связи во время бессмысленной презентации (с теменными областями, являющимися местом схождения) дополнительно подтверждается недавним исследованием восприятия лица [56]. Авторы продемонстрировали теменное увеличение iGBR в ответ на правильно сконфигурированные компоненты человеческого лица по сравнению с стимулами, в которых различные черты лица были представлены в нетипичных местах, не имеющих согласованного представления и не способных вызвать соответствующий процесс интеграции.
Мы должны указать, что существует еще одна, альтернативная интерпретация, которая может объяснить редкое количество значимых соединений во время обработки незнакомого объекта. Вместо того, чтобы делать вывод о пониженном уровне взаимодействий с мозгом из-за небольшого количества взаимодействий, также возможно, что локальное снижение гамма-активности (то есть сокращение ближней синхронизации) приводит к редкому количеству взаимодействий без изменения лежащих в основе взаимодействий между ними. области мозга.То есть уменьшение количества связей PDC и PLA в незнакомом состоянии может отражать просто снижение локальной гамма-активности. По сути, это связано с тем, что все типы мер связи (включая PDC и PLA) неизменно чувствительны к изменениям отношения сигнал / шум (SNR). По этой причине в настоящее время мы не можем исключить эту альтернативную интерпретацию паттерна связи незнакомого состояния ни теоретически, ни экспериментально. Чтобы отказаться от этой альтернативной интерпретации, дальнейшие методологические разработки должны рассмотреть этот вопрос более глубоко.Другое, возможно, прямое решение — сравнить два экспериментальных условия, каждое из которых выявляет аналогичный уровень частотно-зависимых локальных нейронных ответов, путем прямого сопоставления направленности коммуникации между обоими условиями.
Наша текущая работа была направлена на то, чтобы выйти за рамки простых изменений фазовой синхронизации, используя преимущества многомерной авторегрессионной модели (MVAR) PDC, основанной на причинности Грейнджера, обеспечивающей частотно-зависимую меру направленных взаимодействий [26], [57] .Было предложено несколько других методов для получения электрофизиологических паттернов связности мозга на основе оценки корковой активности (обзоры см. [39], [58]). Примечательно, что была разработана еще одна мера связи MVAR, а именно функция направленной передачи (DTF), которая аналитически тесно связана с PDC [27], [59]. Как и PDC, DTF также соответствует необходимости использования многомерного подхода в отличие от попарного вычисления при оценке информационного потока между физиологическими временными рядами [59], [60].В последние годы PDC и DTF привлекают все большее внимание в электрофизиологических исследованиях и изучались в нескольких условиях моделирования (например, [57], [59], [61]), а также исследовались в пространстве источников (например, [62 ] — [64]). Однако локализация источников в этих исследованиях была ограничена теми областями Бродмана, которые были предварительно выбраны по анатомическим основаниям вместе с априорными предположениями относительно функциональной роли, которую может играть данная область коры головного мозга. Напротив, реконструкция нашего источника была направлена исключительно на локализацию колебательного эффекта в гамма-полосе частот, т.е.е. индуцированные изменения мощности гамма-излучения модулируются знакомыми стимулами. Этот вид локализации источника имел решающее значение для нашего исследования, поскольку мы стремились идентифицировать области мозга, вызывающие iGBR, то есть лежащие в основе процесса визуального представления объекта, чтобы охарактеризовать функциональную сеть, установленную между этими областями.
Непростая перспектива будущего, безусловно, заключается в исследовании более сложных когнитивных процессов, таких как, например, рабочая память или составляющие части явных и неявных сетей памяти и четкая направленность их взаимодействий.Эти результаты могут быть подтверждены данными внутричерепных записей (например, [65] — [67]).
Заключение
Настоящее исследование — первое, в котором определяется направленность колебательных взаимодействий мозга в исходном пространстве во время распознавания человеческого объекта и демонстрируется, что знакомые, но не незнакомые объекты участвуют в широко распространенном взаимном потоке информации. Подход многомерного соединения PDC обеспечивает качественное улучшение по сравнению с традиционным анализом фазовой синхронизации, обеспечивая направленность взаимодействий мозга.Отчетливая реципрокность паттерна PDC в ответ на знакомые визуальные объекты экспериментально подтверждает идею о том, что функциональные сети мозга, успешно реализующие интеграцию функций объекта, реализуются посредством широко взаимных (с прямой и обратной связью) осциллирующих взаимодействий между конкретным мозгом. области [13], [52] — [54]. Незнакомые стимулы могут не вызвать такой механизм интеграции, так что исключительно однонаправленные связи PDC, возможно, могут отражать ограниченную обработку отдельных характеристик объекта.
Материалы и методы
Участников
Десять здоровых студентов-правшей (7 женщин; в возрасте от 20 до 27 лет, среднее значение: 23,6, стандартное отклонение: 2,2) получили оплату за участие (6 евро в час). Протокол эксперимента соответствовал местным руководящим принципам этики (этический совет Лейпцигского университета) и Хельсинкской декларации. Участники дали информированное согласие до начала эксперимента. У всех участников было нормальное зрение или зрение с поправкой на нормальное, а в анамнезе не было зарегистрировано неврологических или психических расстройств.
Стимулы и процедура
Экспериментальные стимулы представляли собой либо цветные изображения, выбранные из стандартной библиотеки изображений (Hemera Technologies, 1997), представляющие реальные объекты, такие как яблоко, чашка или слон (т. Е. знакомых или значимых объектов, n = 200), либо цветные изображения незнакомых объекта (т. Е. Бессмысленных объектов, n = 200) — см. Рисунок 1 для некоторых примеров. Изображения неузнаваемых объектов были созданы авторами путем искажения значимых изображений из библиотеки таким образом, чтобы они физически соответствовали значимым изображениям всеми возможными способами (например,грамм. размер, сложность, составная часть) кроме знакомств. Подробное описание процедуры искажения можно найти в [1].
Два экспериментальных списка были созданы из пула стимулов для каждого испытуемого путем случайного выбора 100 знакомых и 100 незнакомых картинок. В каждом испытании была представлена другая картина, чтобы избежать ранее описанных эффектов подавления повторения iGBR [68], [69]. Все стимулы (примерно 6 на 6 градусов) появлялись в случайном порядке и представлялись централизованно на 19-дюймовом ЭЛТ-экране (частота обновления: 70 Гц), помещенном в 1.5 метров перед испытуемыми.
Временная последовательность событий в рамках каждого из 200 экспериментальных испытаний была следующей: перед каждым элементом на экране появлялся крест фиксации (0,3 на 0,3 градуса) на случайный интервал от 500 до 700 мс. Последующее предъявление каждой картинки длилось 700 мс и сменялось появлением креста фиксации длительностью 800 мс. Ответы должны были быть предоставлены в конце испытания, о чем свидетельствует представление запроса.Вкратце, порядок событий в одном испытании был следующим: фиксация — картинка — фиксация — запрос. Испытуемый должен был ответить, было ли представленное изображение знакомым или незнакомым, нажав кнопку соответствующим указательным пальцем. Распределение кнопок ответа задачам уравновешивалось по предметам. Испытуемых просили избегать движений и моргания глаз во время предъявления фиксирующего креста и визуальных объектов. Чтобы сделать небольшой перерыв, эксперимент был разделен на два блока по 100 попыток в каждом.
Электрофизиологические записи
Экспериментальные данные были собраны в независимом исследовании ЭЭГ. Однако необходимо отметить, что в этом исследовании использовалась та же парадигма и идентичный набор стимулов, о которых сообщалось ранее [1]. ЭЭГ регистрировали со 128 электродов Ag-AgCl, расположенных на коже головы, с помощью системы усилителя BioSemi Active-Two в электрически экранированном и звукопоглощающем помещении. Кроме того, были записаны горизонтальная и вертикальная электроокулограмма (ЭОГ), чтобы облегчить последующее обнаружение артефактов, возникающих в результате движений глаз и морганий.ЭЭГ и ЭОГ регистрировались с частотой 512 Гц. Сигнал ЭЭГ подвергался высокочастотной фильтрации (sinc-ответ 5 -го порядка с точкой -3 дБ при 128 Гц) и сохранялся для автономного анализа. Два дополнительных электрода около канала CPz (CMS-Common Mode Sense и DRL-Driven Right Leg; см. Http://www.biosemi.com/faq/cms&drl.htm) использовались в качестве опорного и заземляющего соответственно. Для дальнейшего анализа использовался средний эталон. Автоматизированная коррекция артефактов применялась к эпохам ЭЭГ, начинающимся за 500 мс до и 1500 мс после начала изображения, посредством «статистической коррекции артефактов в исследованиях плотных массивов» (SCADS; [70]).Эта процедура широко применяется в данной области, применялась и описывалась в нескольких публикациях (например, [71], [72]).
Анализ данных (A): изменения спектральной мощности, проанализированные с помощью авторегрессионного моделирования
Изменения iGBR были проанализированы с помощью авторегрессионного моделирования. Все следующие вычислительные шаги (для авторегрессионного моделирования и анализа PDC) реализованы в BioSig (версия: 1.95), программной библиотеке с открытым исходным кодом для обработки биомедицинских сигналов, которая доступна в Интернете по адресу http: // biosig.sf.net [73].
Авторегрессионное моделирование (AR) — это подход к анализу временных рядов, с помощью которого математическая модель подгоняется к дискретизированному сигналу. Моделирование AR подразумевает, что значение текущей выборки y (t) в последовательности данных длиной N, y (1), y (2),…, y (N) , должно быть предсказано линейно взвешенной суммой. из p самых последних значений выборки, y (t − 1), y (t − 2),…, y (t − p) , причем p является порядком модели. Если y (t) обозначает прогнозируемое значение в момент времени t для одного канала, модель AR для этого одномерного случая формализуется как (1), посредством чего каждое прошлое значение выборки y (t-k) равно умноженное на k -й параметр авторегрессии a (k) , также называемый коэффициентом регрессии.Чтобы завершить модель AR, к линейной функции добавляется процесс белого шума с нулевым средним, «инновационный процесс» x (t) [57]. Термин x (t) , который также часто называют «ошибкой предсказания», равен разнице между предсказанием, полученным из линейной комбинации самых последних текущих значений (выборок), и фактическим значением в момент времени t . Фактически, этот инновационный процесс нельзя приравнять к термину ошибки в его обычном смысле, поскольку согласно определению смоделированный временной ряд y (t) будет равен нулю, если x (t) равно нулю.Соответственно, x (t) имеет , которые следует рассматривать как движущую силу модели [74] — [76]. Для оценки параметров AR мы использовали алгоритм Бурга, который показал преимущество перед другими оценками [77]. В соответствии с предыдущими исследованиями, порядок модели p , который определяет спектральное разрешение AR, был установлен на 15, чтобы гарантировать подходящее разрешение нескольких частотных компонентов (например, p /2 = 15/2) в последующем анализе [74 ], [78], [79]. Мы выбрали этот путь после того, как попытались найти оптимальный порядок модели с помощью информационного критерия Акаике, AIC [80] или байесовского критерия Шварца, SBC [81].Наша попытка определить оптимальный порядок модели путем определения минимума AIC и SBC в зависимости от порядка модели ( p исследовано между 2–30) не обнаружила согласованного решения. Фактически, AIC и SBC монотонно падали с увеличением порядка модели, не имея какого-либо локального минимума в исследуемом интервале. Поэтому, в соответствии с предыдущими исследованиями ЭЭГ (см. Выше), мы выбрали модель порядка 15, что можно рассматривать как компромисс между достаточным спектральным разрешением и избыточной параметризацией (аналогичный подход см. В [82]).Для получения спектральных характеристик базового сигнала модель AR преобразуется в частотную область, где функция спектральной плотности мощности (PSD) для данного канала выводится следующим образом: (2) Здесь дисперсия инновационного процесса равна представлен как σ 2 и T обозначает интервал дискретизации (T = 1/ f 0 ; f 0 = 512 Гц). Важно отметить, что для настоящих целей каждое испытание было разделено на временные окна 150 мс, перекрывающиеся на 50 мс, начиная с -200 до 650 мс относительно начала стимула, что давало 77 выборок на окно .Впоследствии информация в каждом временном окне в каждом испытании была объединена, в результате чего был получен один поток данных, к которому была приспособлена одна модель AR. Другими словами, одна модель AR была приспособлена к окну с длиной выборки, равной 77 раз N испытаний, которое было последовательно перемещено во времени на 25 выборок (т.е. 50 мс). Обратите внимание, что испытания в созданном потоке данных были разделены достаточным количеством не-чисел (NaN), то есть p + 1 (15 + 1) число NaN, предотвращающих ложные корреляции между испытаниями.Всего было получено 18 перекрывающихся временных окон длиной 150 мс каждое, начиная с 200 мс до и до 650 мс после начала стимула. Этот подход показывает более точный временной ход, в отличие от моделирования неперекрывающихся окон. Кроме того, из-за короткого окна анализа квазистационарность временного ряда приближается [27], [83].
Чтобы идентифицировать задержку и частотный диапазон пиков iGBR, полученная AR спектральная мощность базовой линии (от -200 до -50 мс до начала стимула) вычиталась из значений мощности всех последующих временных окон.Впоследствии эти скорректированные на исходном уровне значения мощности, усредненные по двадцати двум участкам теменно-затылочного электрода и у всех субъектов, были представлены на отдельных частотно-временных (TF) графиках для каждого состояния в диапазоне частот 30–90 Гц. Электроды, используемые для TF-графика, были выбраны на основе сферического сплайна, интерполированного топографическим распределением [84] гамма-пика, усредненного для обоих условий (аналогичный подход см. В [1], [20]). Соответствующие места для электродов показаны на рис. 3A и 3B.Для дальнейшего анализа спектральная мощность в интервале максимальных индуцированных гамма-амплитуд (150–400 мс после появления стимула, см. «Результаты»), охватывающая три смежных временных окна, была усреднена для каждого испытуемого. Полученные в результате данные среднего теменно-затылочного региона были проанализированы с помощью парного t-критерия, чтобы определить, значительно ли различалась мощность гамма-излучения (p <0,001) между представлениями знакомых и незнакомых объектов.
Анализ данных (B): изменения спектральной мощности проанализированы с помощью вейвлет-анализа
Чтобы сравнить методику, описанную в (A), с «традиционными» методами частотного анализа, мы использовали вейвлет-разложение Морле с шириной 7 периодов на вейвлет.Этот подход использовался в большом количестве исследований ЭЭГ с момента его введения Бертраном и Пантевым в 1994 г. [85] (например, [14], [18], [32], [86]). Для вейвлет-анализа (и последующего анализа источников) использовались внутренние процедуры, работающие под управлением MATLAB (The MathWorks, Inc.). Результатом вейвлет-анализа является изменяющаяся во времени величина сигнала в каждой полосе частот, что приводит к временному частотному (TF) представлению входного сигнала. Амплитуды TF усредняются по единичным испытаниям, что позволяет анализировать компоненты без фазовой синхронизации.Чтобы исключить значения фазовой синхронизации из анализа, вызванный ответ (т.е. ERP) вычитался из каждого испытания, как и в предыдущих публикациях (например, [16], [32], [87], [88]). Подробное описание примененного здесь вейвлет-подхода Морле можно найти в других работах [5], [85]. Чтобы идентифицировать латентность и частотный диапазон индуцированного пика гамма-амплитуды, рассчитайте средние скорректированные по базовой линии спектральные амплитуды (базовый уровень: от -200 до -50 мс до начала стимула) в двух экспериментальных условиях и использованные ранее теменно-затылочные электроды ( ср.Участки A) были представлены на графике TF в диапазоне 30–90 Гц. Для дальнейшего статистического анализа то же временное окно, что и раньше (см. Раздел A), охватывающее максимальные гамма-амплитуды (150–400 мс после начала действия стимула) и среднее значение по региону, были проанализированы с использованием парного t-критерия (знакомый и незнакомый). . Из-за индивидуальных различий в частоте гамма-пика был выбран вейвлет, рассчитанный на частоту максимальной амплитуды испытуемого в гамма-диапазоне (диапазон средней пиковой частоты в интервале 150-400 мс: 51 Гц; стандартная ошибка ± 12.9 Гц).
Анализ данных (C): реконструкция генераторов индуцированных GBR в пространстве источников
Распределения плотности внутричерепного тока, совместимые с наблюдаемыми топографиями напряжения кожи головы, оценивали с помощью электромагнитной томографии с переменным разрешением, VARETA [21], [22]. Программное обеспечение для реконструкции источника было разработано некоторыми авторами. Этот подход подробно объясняется в Gruber et al. (2006) [20]. Вкратце, были рассчитаны однократные пробные анализы VARETA для заданной частоты и временного окна, чтобы оценить плотности первичного тока, которые генерируют измеренный пик iGBR.Модель проводника была основана на 3244 точках сетки (шаг сетки 7,00 мм), которые были размещены в зоне регистрации (128 электродов) на основе среднего вероятностного атласа МРТ («средний мозг»), подготовленного Монреальским неврологическим институтом [89 ].
Чтобы локализовать различия в активации между двумя условиями, статистические сравнения были выполнены с помощью зависимого одностороннего статистического дизайна ANOVA (знакомый и незнакомый) для временного окна, как определено в (A) и (B), i .е. 150–00 мс после появления стимула. Результат одностороннего дисперсионного анализа был использован для построения соответствующих статистических параметрических карт (SPM). Для учета пространственных зависимостей между вокселями корректировка порога активации была рассчитана с помощью теории случайного поля [90]. Все результаты были представлены в виде трехмерных активационных изображений, построенных на основе среднего монреальского мозга [89]. Наконец, области интересов (ROI) были определены путем выбора вокселей, соответствующих кортикальным областям, которые показали значительные различия в диапазоне гамма-диапазона.Для последующего анализа связи использовался воксель с максимальным эффектом в пределах каждой области интереса (см. Раздел D и E).
Анализ данных (D): долгосрочная синхронизация (анализ фазовой синхронизации) в пространстве источника
Для каждого ROI (см. Раздел C) и каждого испытания было вычислено обратное решение во временной области. Далее результаты, полученные для каждой области интереса, были разложены с помощью PCA на их основные компоненты, из которых первые основные компоненты использовались для анализа сопряжения.Впоследствии был проведен анализ фазовой синхронизации, основанный на методике, предложенной несколькими авторами [14], [18], [91]. Подробное описание всей процедуры можно найти в другом месте (например, [20], [40]). Вкратце, для каждого испытуемого была вычислена фазовая синхронность для сигнала, полученного из PCA на отдельной частоте f 0 его / ее максимальной гамма-активности (f0 ± 3 Гц; см. Также [18]) с извлечением значений фазы. с помощью вейвлет-анализа Морле. Чтобы проверить, является ли конкретное значение фазовой синхронизации во временном окне максимального увеличения гамма-мощности статистически значимым, был использован метод рандомизации.В течение этого временного окна значения фазовой синхронизации между всеми парными областями интереса были рассчитаны и усреднены по субъектам. Кроме того, аналогично рассчитывались средние значения 2000 PLV на перетасованных данных. Перестановка была выполнена путем рандомизации порядка испытаний и затем расчета фазовой синхронизации между событиями, которые не были зарегистрированы в одно и то же время. Среднее значение PLV считалось статистически значимым, если оно было больше, чем максимальное из 2000 перемешанных значений, что указывает на значение вероятности p <0.001. Чтобы проиллюстрировать результаты, любая значительная фазовая синхронизация была изображена линией от ROI i до ROI j .
В заключение о методологическом аспекте реконструкции источника следует отметить, что наши результаты относительно PLA в пространстве источников очень похожи на результаты предыдущей публикации [20]. Однако в исследовании Грубера и его сотрудников PLA была рассчитана для отдельных прямых решений на основе каждого источника iGBR, чтобы преодолеть проблему, заключающуюся в том, что плотность каждого источника тока состоит из трех направлений (X, Y и Z).Это привело бы к 3 × 3 возможным связям в пространстве источников. Здесь мы рассчитали наши меры связи непосредственно между источниками, используя первую главную составляющую сигнала в каждом из трех направлений. Таким образом, этот подход способен преодолеть «проблему трех направлений» при использовании PLA и PDC в пространстве источников.
Анализ данных (E): передача информации (частичная направленная когерентность) в пространстве источников
Чтобы проанализировать передачу информации между идентифицированными интересующими областями в исходном пространстве, мы вычислили частичную направленную когерентность (PDC) для тех же сигналов, которые использовались в разделе D.Эта мера связи основана на многомерном авторегрессионном (MVAR) моделировании, которое одновременно моделирует пространственные и временные корреляции, тем самым обеспечивая пространственно-временную модель разнесенных сигналов мозга [26], [57], [74]. С математической точки зрения, частотно-зависимая связность, выявленная PDC, является реализацией концепции причинности Грейнджера, согласно которой наблюдаемый временной ряд x ( t n ) «вызывает» другую серию y ( t n ) в момент времени t n , если знание прошлых значений x ( t n ) значительно улучшает прогноз y ( t n ) [27 ], [92].Эта связь между временными рядами не является взаимной, то есть x ( t n ) может вызывать y ( t n ) без y ( t n ) обязательно вызывая x ( т н ). Это отсутствие взаимности (или симметрии) позволяет оценить направление передачи информации и, таким образом, оценить двунаправленную связь или отношения обратной связи.
В частности, модель многомерной авторегрессии (MVAR) была приспособлена к временным рядам, выявленным обратным решением для каждой области интереса.С этой целью модель авторегрессии, которая была определена выше для одномерного случая (см. Уравнение 1), должна быть расширена для многомерного случая (с числом временных рядов / областей интереса от 1 до M) в соответствии с: (3) Это уравнение может быть переписывается в матричной форме как (4) Вектор Y ( t ) представляет измеренные значения (выборки) для каждого временного ряда M (M количество областей интереса) в момент времени t . Параметры авторегрессии всех комбинаций ROI с запаздыванием по времени k образуют матрицы A ( k ) до порядка p, i.е. A (1), A (2),…, A (p) каждый со своей размерностью M на M . Недиагональные элементы многомерной матрицы параметров AR являются весовыми коэффициентами, определяющими перекрестные члены между ROI.
Например, весовой коэффициент a 1, M ( k ) характеризует вклад ROI M в ROI 1 при временном лаге k . Наконец, вектор X ( t ) представляет инновационный процесс (см.В разделе A) предполагается, что это многомерный процесс белого шума с нулевым средним. Чтобы раскрыть спектральные свойства многомерного временного ряда, это модельное уравнение (уравнение 4) преобразуется в частотную область, что дает (5), где (6) с матрицей A̅ ( f ), представляющей преобразованный по частоте AR -коэффициенты a̅ 1,1 ( f ), a̅ 1,2 ( f ),…, a̅ 1, M ( f ) до a̅ M , M ( f ), а частота дискретизации — f S .Параметр I относится к единичной матрице с размерностью M на M.
На основе многомерных параметров с преобразованием частоты, включенных в A̅ ( f ), направленная передача информации из области интереса j в область интереса i количественно оценивается с помощью частичной направленной когерентности (PDC) следующим образом: (7 ) с A̅ i , j ( f ), являющимся элементом i , j- th, и A̅ :, j ( f ) j -й столбец матрицы AR A̅ ( f ).Верхний индекс H указывает на оператор Гермета , то есть транспонированное комплексное сопряжение матрицы A̅ ( f ). С помощью этого определения частотно-зависимое причинное влияние временного ряда от ROI j до ROI i количественно оценивается по отношению ко всему прочему информационному потоку, исходящему из ROI j . Другими словами, полученные значения PDC нормализованы по отношению ко всем исходящим потокам из исходной области интереса j и находятся в диапазоне от нуля до единицы, причем единица является максимальным уровнем передаваемого информационного потока (0 ≥ | PDC i, j (ж) | 2 ≤1).Кроме того, суммарная мощность всех соединений, происходящих из области интереса j, например PDC 1, j (f) , PDC 2, j (f) ,… PDC M, j (f) , равно единице: [26], [57].
Аналогично подходу PLA (см. Раздел D), полученные сигналы в каждой области интереса вводятся в этот анализ во временном окне, охватывающем максимальные амплитуды гамма-излучения (150–400 мс после начала стимула). Данные обрабатывались окнами в интервале длиной 128 выборок (т.е. длиной 250 мс) и объединялись в один поток данных для каждого условия (как описано в разделе A).Наконец, значения PDC были оценены в полосе частот наведенного гамма-пика (т.е. 40–90 Гц, см. Результаты).
Поскольку распределение оценок PDC не установлено аналитически [27], [93], [94], мы использовали подход складного ножа для дальнейшего статистического анализа [95], [96]. Подробности этого метода можно найти в [74], [96]. Порог для нашей процедуры складного ножа был установлен на p <0,001. На анатомическом шаблоне местоположений области интереса каждая стрелка, указывающая от исходной области интереса i к ее целевой области интереса j , представляет значимый PDC.
Благодарности
Мы благодарим Андреаса К. Энгеля за полезные комментарии к этой работе. Мы благодарны Керстин Флейк за помощь в подготовке рисунка и Эмили Сайед за вычитку этой рукописи. Наконец, мы должны выразить нашу искреннюю благодарность за ценные комментарии трех анонимных рецензентов, которые помогли существенно улучшить эту рукопись.
Вклад авторов
Задумал и спроектировал эксперименты: MM TG.Проведены эксперименты: ТГ. Проанализированы данные: TG GS AS NT. Написал статью: TG GS.
Ссылки
- 1. Busch NA, Herrmann CS, Müller MM, Lenz D, Gruber T (2006) Межлабораторное исследование связанной с событием гамма-активности в стандартной парадигме распознавания объектов. NeuroImage 33: 1169–1177.
- 2. Kaiser J, Lutzenberger W (2003) Вызванная активность гамма-диапазона и функция человеческого мозга. Невролог 9: 475–484.
- 3. Кейл А., Грубер Т., Мюллер М.М. (2001) Функциональные корреляты макроскопической высокочастотной активности мозга в зрительной системе человека.Neurosci Biobehav Rev 25: 527–534.
- 4. Eckhorn R, Reitboeck HJ, Arndt M, Dicke P (1990) Связывание функций через синхронизацию между распределенными сборками: моделирование результатов зрительной коры головного мозга кошки. Нейронные вычисления 2: 293–307.
- 5. Таллон-Бодри C, Бертран O (1999) Колебательная гамма-активность у людей и ее роль в представлении объекта. Тенденции Cogn Sci 3: 151–162.
- 6. Мартинович Дж., Грубер Т., Мюллер М.М. (2007) Индуцированные отклики в гамма-диапазоне предсказывают задержки распознавания во время идентификации объекта.Дж. Cogn Neurosci 19: 921–934.
- 7. Бертран О., Таллон-Бодри C (2000) Колебательная гамма-активность у людей: возможная роль для представления объекта. Int J Psychophysiol 38: 211–223.
- 8. Энгель А.К., Сингер В. (2001) Временная привязка и нейронные корреляты сенсорной осведомленности. Тенденции Cogn Sci 5: 16–25.
- 9. Дженсен О., Кайзер Дж., Лашо Дж. П. (в печати) Колебания гамма-частоты человека, связанные с вниманием и памятью.Trends Neurosci.
- 10. Купер Р., Уинтер А.Л., Кроу Х.Дж., Уолтер В.Г. (1965) Сравнение подкорковой, корковой и скальповой активности с использованием постоянно находящихся в организме электродов у человека. Электроэнцефалограмма Clin Neurophysiol 18: 217–228.
- 11. Pfurtscheller G, Lopes da Silva FH (1999) Связанная с событием синхронизация и десинхронизация ЭЭГ / МЭГ: основные принципы. Clin Neurophysiol 110: 1842–1857.
- 12. Бресслер С.Л., Келсо Дж. А. (2001) Корковая координационная динамика и познание.Тенденции Cogn Sci 5: 26–36.
- 13. Фрис П. (2005) Механизм когнитивной динамики: нейронная связь через нейронную когерентность. Тенденции Cogn Sci 9: 474–480.
- 14. Lachaux JP, Rodriguez E, Martinerie J, Varela FJ (1999) Измерение фазовой синхронизации в сигналах мозга. Hum Brain Mapp 8: 194–208.
- 15. Варела Ф., Лашо Дж. П., Родригес Э., Мартинери Дж. (2001) Мозговая сеть: фазовая синхронизация и крупномасштабная интеграция. Nat Rev Neurosci 2: 229–239.
- 16. Грубер Т., Мюллер М.М. (2005) Осцилляторная активность мозга диссоциирует между содержанием ассоциативных стимулов в задаче повторения прайминга в ЭЭГ человека. Cereb Cortex 15: 109–116.
- 17. Gruber T, Müller MM, Keil A (2002) Модуляция индуцированных ответов гамма-диапазона в задаче перцептивного обучения в ЭЭГ человека. J Cogn Neurosci 14: 732–744.
- 18. Родригес Э., Джордж Н., Лашо Дж. П., Мартинери Дж., Рено Б. и др. (1999) Тень восприятия: удаленная синхронизация мозговой активности человека.Природа 397: 430–433.
- 19. Lachaux JP, Rudrauf D, Kahane P (2003) Внутричерепная ЭЭГ и картирование мозга человека. J Physiol Paris 97: 613–628.
- 20. Gruber T, Trujillo-Barreto NJ, Giabbiconi CM, Valdes-Sosa PA, Müller MM (2006) Анализ электрической томографии мозга (BET) индуцированных ответов гамма-диапазона во время простой задачи распознавания объектов. NeuroImage 29: 888–900.
- 21. Bosch-Bayard J, Valdes-Sosa P, Virues-Alba T, Aubert-Vazquez E, John ER, et al.(2001) 3D статистическое параметрическое картирование спектров источников ЭЭГ с помощью электромагнитной томографии с переменным разрешением (VARETA). Clin Electroencephalogr 32: 47–61.
- 22. Трухильо-Баррето Н.Дж., Обер-Васкес Э., Вальдес-Соса П.А. (2004) Байесовское усреднение при визуализации ЭЭГ / МЭГ. NeuroImage 21: 1300–1319.
- 23. Бар M (2004) Визуальные объекты в контексте. Nat Rev Neurosci 5: 617–629.
- 24. Shafritz KM, Gore JC, Marois R (2002) Роль теменной коры в связывании зрительных функций.Proc Natl Acad Sci U S A 99: 10917–10922.
- 25. Танака К. (1996) Нижневисочная кора и предметное зрение. Анну Рев Neurosci 19: 109–139.
- 26. Баккала Л.А., Самешима К. (2001) Частичная направленная когерентность: новая концепция определения нервной структуры. Biol Cybern 84: 463–474.
- 27. Камински М., Динг М., Трукколо В.А., Бресслер С.Л. (2001) Оценка причинно-следственных связей в нейронных системах: причинность Грейнджера, направленная передаточная функция и статистическая оценка значимости.Biol Cybern 85: 145–157.
- 28. Jerbi K, Lachaux JP, N’Diaye K, Pantazis D, Leahy RM и др. (2007) Согласованное нейронное представление скорости рук у людей, выявленное с помощью МЭГ. Proc Natl Acad Sci U S A 104: 7676–7681.
- 29. Меллони Л., Молина С., Пена М., Торрес Д., Сингер В. и др. (2007) Синхронизация нейронной активности в областях коры коррелирует с сознательным восприятием. J Neurosci 27: 2858–2865.
- 30. Uhlhaas PJ, Linden DE, Singer W, Haenschel C, Lindner M и др.(2006) Дисфункциональная дальняя координация нервной активности во время гештальт-восприятия при шизофрении. J Neurosci 26: 8168–8175.
- 31. Таллон-Бодри C (2003) Колебательная синхрония и зрительное познание человека. J Physiol Paris 97: 355–363.
- 32. Грубер Т., Мюллер М.М. (2006) Колебательная активность мозга в ЭЭГ человека во время задач косвенной и прямой памяти. Brain Res 1097: 194–204.
- 33. Fuster JM (1997) Сетевая память.Trends Neurosci 20: 451–459.
- 34. Fuster JM (2006) Когнит: сетевая модель коркового представления. Int J Psychophysiol 60: 125–132.
- 35. Ungerleider LG (1995) Исследования корковых механизмов памяти с помощью функциональной визуализации мозга. Science 270: 769–775.
- 36. Konig P, Kruger N (2006) Символы как саморазвивающиеся сущности в процессе оптимизации выделения признаков и прогнозов. Biol Cybern 94: 325–334.
- 37.Гросс Дж., Куяла Дж., Хамалайнен М., Тиммерманн Л., Шницлер А. и др. (2001) Динамическое отображение когерентных источников: изучение нейронных взаимодействий в человеческом мозге. Proc Natl Acad Sci U S A 98: 694–699.
- 38. Гросс Дж., Шмитц Ф., Шницлер И., Кесслер К., Шапиро К. и др. (2004) Модуляция нервной синхронизации на большие расстояния отражает временные ограничения зрительного внимания у людей. Proc Natl Acad Sci U S A 101: 13050–13055.
- 39. Шницлер А., Гросс Дж. (2005) Анализ функциональной связности в магнитоэнцефалографии.Int Rev Neurobiol 68: 173–195.
- 40. Gruber T, Giabbiconi CM, Trujillo-Barreto NJ, Müller MM (2006) Подавление повторения индуцированных ответов гамма-диапазона устраняется переключением задач. Eur J Neurosci 24: 2654–2660.
- 41. Баккала Л.А., Самешима К. (2001) Преодоление ограничений корреляционного анализа для множества одновременно обрабатываемых нейронных структур. Prog Brain Res 130: 33–47.
- 42. Kaminski M, Blinowska K, Szclenberger W (1997) Топографический анализ когерентности и распространения активности ЭЭГ во время сна и бодрствования.Electroencephalogr Clin Neurophysiol 102: 216–227.
- 43. Самешима К., Баккала Л.А. (1999) Использование частичной направленной когерентности для описания взаимодействий нейронального ансамбля. J Neurosci Methods 94: 93–103.
- 44. Танака К. (1993) Нейронные механизмы распознавания объектов. Наука 262: 685–688.
- 45. Унгерлейдер Л.Г., Мишкин М. (1982) Две корковые зрительные системы. В: Ingle DJ, Goodale MA, редакторы. Анализ визуального поведения. Кембридж: MIT Press.С. 549–586.
- 46. Бар М., Аминов Э. (2003) Кортикальный анализ визуального контекста. Нейрон 38: 347–358.
- 47. Фенске М.Дж., Аминофф Э., Гронау Н., Бар М. (2006) Облегчение распознавания визуальных объектов сверху вниз: вклады на основе объектов и контекста. Prog Brain Res 155: 3–21.
- 48. Ullman S (1995) Поиск последовательности и встречные потоки: вычислительная модель для двунаправленного информационного потока в зрительной коре. Cereb Cortex 5: 1–11.
- 49. Corbetta M, Shulman GL, Miezin FM, Petersen SE (1995) Активация верхней теменной коры во время пространственных сдвигов внимания и соединения визуальных функций. Наука 270: 802–805.
- 50. Treisman A (1998) Привязка характеристик, внимание и восприятие объекта. Philos Trans R Soc Lond B Biol Sci 353: 1295–1306.
- 51. Peissig JJ, Tarr MJ (2006) Распознавание визуальных объектов: знаем ли мы больше, чем 20 лет назад? Анну Рев Психол.
- 52. Энгель А.К., Фрис П., Сингер В. (2001) Динамические прогнозы: колебания и синхронность в нисходящей обработке. Nat Rev Neurosci 2: 704–716.
- 53. Singer W, Gray CM (1995) Интеграция визуальных признаков и гипотеза временной корреляции. Анну Рев Neurosci 18: 555–586.
- 54. Sporns O, Tononi G, Edelman GM (2002) Теоретическая нейроанатомия и связь коры головного мозга. Behav Brain Res 135: 69–74.
- 55.Salazar RF, Konig P, Kayser C (2004) Направлял взаимодействия между визуальными областями и их роль в обработке структуры изображения и ожидания. Eur J Neurosci 20: 1391–1401.
- 56. Zion-Golumbic E, Bentin S (2006) Диссоциированные нейронные механизмы для обнаружения лиц и конфигурационного кодирования: данные N170 и индуцированные эффекты колебаний гамма-диапазона. Cereb Cortex.
- 57. Баккала Л.А., Самешима К. (2006) комментируют «Является ли частичная когерентность жизнеспособной техникой для идентификации генераторов нейронных колебаний?»: Почему термин «причинность Герша» неуместен: общие ловушки для вывода нервных структур.Biol Cybern 95: 135–141.
- 58. Дэвид О, Космелли Д., Фристон К.Дж. (2004) Оценка различных мер функциональной связности с использованием модели нейронной массы. NeuroImage 21: 659–673.
- 59. Kus R, Kaminski M, Blinowska KJ (2004) Определение распространения активности ЭЭГ: попарная или многоканальная оценка. IEEE Trans Biomed Eng 51: 1501–1510.
- 60. Блиновска К.Дж., Кус Р., Камински М. (2004) Причинность Грейнджера и информационный поток в многомерных процессах.Phys Rev E Stat Nonlin Soft Matter Phys 70: 050902.
- 61. Астольфи Л., Чинкотти Ф., Маттиа Д., Марчиани М.Г., Баккала Л.А. и др. (2006) Оценка функциональной связи коры с помощью частичной направленной согласованности: моделирование и применение к реальным данным. IEEE Trans Biomed Eng 53: 1802–1812.
- 62. Астольфи Л., Чинкотти Ф., Маттиа Д., Бабилони С., Кардуччи Ф. и др. (2005) Оценка корковой функциональной связи с помощью линейной обратной оценки и направленной передаточной функции: моделирование и применение к реальным данным.Clin Neurophysiol 116: 920–932.
- 63. Астольфи Л., Чинкотти Ф., Маттиа Д., Марчиани М.Г., Баккала Л.А. и др. (2007) Сравнение различных оценщиков корковой связности для записей ЭЭГ с высоким разрешением. Hum Brain Mapp 28: 143–57.
- 64. Бабилони Ф., Чинкотти Ф., Бабилони С., Кардуччи Ф., Маттиа Д. и др. (2005) Оценка корковой функциональной связи с мультимодальной интеграцией данных ЭЭГ и фМРТ высокого разрешения с помощью направленной передаточной функции.NeuroImage 24: 118–131.
- 65. Brovelli A, Lachaux JP, Kahane P, Boussaoud D (2005) Осцилляторная активность с высокой гамма-частотой отделяет внимание от намерения в премоторной коре головного мозга человека. NeuroImage 28: 154–164.
- 66. Lachaux JP, Hoffmann D, Minotti L, Berthoz A, Kahane P (2006) Внутримозговая динамика генерации саккад в лобном поле глаза человека и дополнительном поле глаза. NeuroImage 30: 1302–1312.
- 67. Майни Н., Кахане П., Минотти Л., Хоффманн Д., Бертран О. и др.(2007) Нейронные корреляты консолидации в рабочей памяти. Hum Brain Mapp 28: 183–193.
- 68. Gruber T, Malinowski P, Müller MM (2004) Модуляция колебательной мозговой активности и вызванных потенциалов в задаче повторения прайминга в ЭЭГ человека. Eur J Neurosci 19: 1073–1082.
- 69. Грубер Т., Мюллер М.М. (2002) Влияние повторения изображений на индуцированные ответы гамма-диапазона, вызванные потенциалы и фазовую синхронность в ЭЭГ человека. Brain Res Cogn Brain Res 13: 377–392.
- 70. Junghöfer M, Elbert T, Tucker DM, Rockstroh B (2000) Статистический контроль артефактов в исследованиях ЭЭГ / МЭГ с плотным массивом. Психофизиология 37: 523–532.
- 71. Gruber T, Müller MM, Keil A, Elbert T (1999) Селективное визуально-пространственное внимание изменяет индуцированные ответы гамма-диапазона в ЭЭГ человека. Clin Neurophysiol 110: 2074–2085.
- 72. Мюллер М.М., Кейл А. (2004) Синхронизация нейронов и выборочная обработка цвета в человеческом мозге.J Cogn Neurosci 16: 503–522.
- 73. Schlögl A (2007) Проект BioSig. Доступно в Интернете по адресу http://biosig.sf.net.
- 74. Schlögl A, Supp GG (2006) Анализ данных ЭЭГ, связанных с событиями, с многомерными параметрами авторегрессии. В: Neuper C, Klimesch W, редакторы. Событийная динамика колебаний мозга. Анализ динамики колебаний мозга: методические достижения. Амстердам: Эльзевир. С. 137–152.
- 75. Райт JJ, Liley DTJ (1996) Динамика мозга в глобальном и микроскопическом масштабе — нейронные сети и ЭЭГ.Behav Brain Sci 19: 285–293.
- 76. Зеттерберг Л.Х. (1969) Оценка параметра линейного разностного уравнения с приложением к анализу ЭЭГ. Math Biosci 5: 227–275.
- 77. Schlögl A (2006) Сравнение многомерных регрессивных оценок. Обработка сигналов 2426–2429.
- 78. Supp GG, Schlogl A, Fiebach CJ, Gunter TC, Vigliocco G и др. (2005) Поиск семантической памяти: корковые связи в распознавании объектов в окне N400.Eur J Neurosci 21: 1139–1143.
- 79. Supp GG, Schlogl A, Gunter TC, Bernard M, Pfurtscheller G и др. (2004) Поиск лексической памяти во время N400: корковые связи в слуховом восприятии. Нейроотчет 15: 1209–1213.
- 80. Акаике Х. (1974) Новый взгляд на идентификацию статистической модели. Транзакции IEEE по автоматическому управлению 19: 716–723.
- 81. Schneider T, Neumaier A (2001) Алгоритм 808: ARfit — пакет Matlab для оценки параметров и собственных мод многомерных моделей авторегрессии.Транзакции ACM на математическом программном обеспечении 27: 58–65.
- 82. Бровелли А., Динг М., Ледберг А., Чен Ю., Накамура Р. и др. (2004) Бета-колебания в крупномасштабной сенсомоторной корковой сети: направленные влияния, выявленные причинностью Грейнджера. Proc Natl Acad Sci U S A 101: 9849–9854.
- 83. Ding M, Bressler SL, Yang W, Liang H (2000) Спектральный анализ в коротком окне потенциалов, связанных с корковыми событиями, с помощью адаптивного многомерного авторегрессионного моделирования: предварительная обработка данных, проверка модели и оценка изменчивости.Biol Cybern 83: 35–45.
- 84. Perrin F, Pernier J, Bertrand O, Echallier JF (1989) Сферические сплайны для отображения потенциала и плотности тока на скальпе. Electroencephalogr Clin Neurophysiol 72: 184–187.
- 85. Бертран О., Пантев С. (1994) Частотная зависимость стимула временного колебательного слухового вызванного ответа (40 Гц), изученная с помощью электрических и магнитных записей у людей. В: Пантев С., Эльберт Т., Люткенхенер Б., редакторы. Колебательная динамика мозга, связанная с событием.Нью-Йорк: Пленум Пресс. С. 231–242.
- 86. Tallon-Baudry C, Bertrand O, Delpuech C, Pernier J (1996) Стимул-специфичность визуальных реакций 40 Гц с фазовой синхронизацией и без фазовой синхронизации у человека. J Neurosci 16: 4240–4249.
- 87. Fiebach CJ, Gruber T, Supp GG (2005) Нейрональные механизмы повторения прайминга в затылочно-височной коре: пространственно-временные данные функциональной магнитно-резонансной томографии и электроэнцефалографии. J Neurosci 25: 3414–3422.
- 88. Pfurtscheller G, Andrew C (1999) Связанные с событиями изменения мощности и когерентности полосы: методология и интерпретация. J Clin Neurophysiol 16: 512–519.
- 89. Эванс А.С., Коллинз Д.Л., Миллс С.Р., Браун Э.Д., Келли Р.Л. и др. (1993) Статистические нейроанатомические модели из 305 томов МРТ. Лондон: MTP Press.
- 90. Worsley KJ, Marrett S, Neelin P, Evans AC (1996) Поиск масштабного пространства для активации в изображениях ПЭТ. Составление карты человеческого мозга 4: 74–90.
- 91. Tallon-Baudry C, Bertrand O, Fischer C (2001) Колебательная синхронизация между экстрастриальными областями человека во время поддержания кратковременной зрительной памяти. Дж. Neurosci 21: RC177.
- 92. Granger CWS (1969) Исследование причинно-следственных связей эконометрическими и кросс-спектральными методами. Econometrica 37: 424–438.
- 93. Нолте Г., Бай О, Уитон Л., Мари З., Ворбах С. и др. (2004) Определение истинного взаимодействия мозга по данным ЭЭГ с использованием мнимой части когерентности.Clin Neurophysiol 115: 2292–2307.
- 94. Nunez PL, Srinivasan R, Westdorp AF, Wijesinghe RS, Tucker DM, et al. (1997) Когерентность ЭЭГ. I: Статистика, электрод сравнения, объемная проводимость, лапласианы, визуализация коры головного мозга и интерпретация в нескольких масштабах. Электроэнцефалограмма Clin Neurophysiol 103: 499–515.
- 95. Efron B (1981) Непараметрические оценки стандартной ошибки: складной нож, бутстрап и другие методы. Биометрика 68: 589–599.
- 96.Снайдерс ТАБ, Боргатти С.П. (1999) Непараметрические стандартные ошибки и тесты для сетевой статистики. Соединения 22: 61–70.
Обнаружение движущихся объектов и удаление теней при изменении условий освещения
Обнаружение движущихся объектов — фундаментальный шаг в системе видеонаблюдения. Чтобы устранить влияние изменения освещенности и тени, связанные с движущимися объектами, мы предложили модель отношения локальной интенсивности (LIRM), которая устойчива к изменению освещенности.На основе анализа модели освещения и тени мы обсудили распределение отношения локальной интенсивности. И движущиеся объекты сегментируются без тени с использованием нормализованного отношения локальной интенсивности с помощью гауссиана. модель смеси (GMM). Затем используется эрозия для получения контуров движущихся объектов и удаления пятен рассеянных теней и шумов. После этого мы получаем улучшенные контуры движущихся объектов с помощью нового метода улучшения контуров, в котором соотношение переднего плана и пространственные отношения.Наконец, появился новый метод заполнения дыр на переднем плане. Результаты экспериментов продемонстрировать, что предлагаемый подход позволяет получать движущиеся объекты без отбрасывания тени и показывает отличную производительность при различные условия изменения освещения.
1. Введение
Обнаружение движущихся объектов — это фундаментальный шаг во многих приложениях для анализа изображений, включая автоматическое визуальное наблюдение, индексацию видео и взаимодействие человека с машиной. Было предложено много исследований по обнаружению движущихся объектов, таких как вычитание фона, оптический поток и временная разность [1].Однако на методы обнаружения движущихся объектов часто влияют такие факторы, как тень, изменения освещения и шум. Как правило, разные факторы вызывают разные последствия. В этой статье мы сосредоточимся на факторах тени и освещения.
Тень вызывает множество проблем при локализации, сегментации, обнаружении и отслеживании объектов. Кроме того, тень может вызвать следующие проблемы: объекты сливаются друг с другом; форма объекта может быть изменена; задний план может быть ошибочно классифицирован как передний план, а объекты пропускаются [2].Тени, связанные с движущимися объектами, можно легко принять за дополнительные объекты. В то же время, если освещение изменяется, некоторые пиксели фона могут быть обнаружены как пиксели переднего плана, что затрудняет получение чистых движущихся объектов. Следовательно, устранение теней и обработка изменений освещения имеют большое влияние на выполнение последующих шагов, таких как отслеживание, распознавание, классификация и анализ активности, которые требуют точного обнаружения движущегося объекта и получения его точной формы.
Некоторые обзоры об обнаружении теней были опубликованы в литературе [2–4], от взглядов на физические и геометрические до эвристических методов. Большинство методов обнаружения теней в реальном времени работают на уровне пикселей и используют информацию о цвете для обнаружения теней прямо или косвенно, полностью или частично. Методы обнаружения теней можно условно разделить на две категории: на основе статистики и на основе характеристик видео.
Принцип статистических методов заключается в построении пиксельных статистических моделей обнаружения отбрасываемых теней.В [5] Живкович и ван дер Хейден использовали модель смеси Гаусса (GMM) для обнаружения движущихся отбрасываемых теней. Этот метод состоит из построения GMM для движущихся объектов, определения распределения движущихся объектов и теней и изменения скорости обучения распределений. Джоши и Папаниколопулос [6] предлагают технику полууправляемого обучения, чтобы справиться со статической обстановкой с участием человека для обнаружения теней. Юнг [7] использует статистический подход в сочетании с геометрическими ограничениями для обнаружения теней, но это только для видеопоследовательностей с серой шкалой.Методы, основанные на статистике, определяют распределение значений теневых пикселей и устойчивы в различных сценах. Хотя эти методы уменьшают ложные совпадения описаний свойств (т. Е. Цвета или интенсивности) тени, они не могут их устранить. Как правило, эти методы требуют обучающих видеопоследовательностей, а тень должна извлекаться из обучающих видеопоследовательностей вручную. Кроме того, сложно работать в режиме онлайн и в реальном времени, потому что эти методы требуют дополнительного обучения.
Методы, основанные на функциях видео, основаны на том факте, что функции видео, в том числе геометрические, цвет, градиент, яркость и т. Д., Различаются по тени, фону и движущимся объектам.Эти методы более общие, чем статистические. Методы, основанные на характеристиках изображения, можно разделить на следующие четыре категории [2]: на основе цветности, на основе физических характеристик света, на основе геометрических соотношений и на основе текстуры.
Методы, основанные на цветности, в основном основаны на одном пикселе и сочетаются с информацией о цвете для проверки тени. Эти методы делают определенные предположения о свойствах тени: (1) тень затемняет область фона, на которую она падает; (2) на фоновой плоскости падает тень; (3) тень меняет яркость области более существенно, чем цвет [8].Если эти предположения не выполняются, точность основанных на цвете подходов для обнаружения теней, очевидно, снизится. Для лучшего разделения между интенсивностью и цветностью было разработано несколько цветовых пространств, таких как HSV [9], c1c2c3 [10], HSL [11] и RGB [12], для надежного обнаружения движущихся отбрасываемых теней. Большинство из этих методов недороги с точки зрения вычислений и просты в реализации. Однако они чувствительны к шуму и не сработают, когда области тени более темные или движущиеся объекты имеют аналогичную информацию о цвете с фоном.
Методы, основанные на физических характеристиках света, основаны на модели линейного ослабления интенсивности света, которая предполагает, что источник освещения излучает чистый белый свет. На открытом воздухе основным источником света является солнечный свет (белый), а отраженный свет исходит от неба (синий). Обычно на другие источники света влияет солнечный свет. Если солнечный свет заблокирован, эффект отраженного света от неба увеличивается, и цветность затененной области смещается в сторону синего компонента.Надими и Бхану [13] представили дихроматическую модель, которая учитывает два источника света для эффективного прогнозирования изменения цвета затененной области. В дальнейших работах рассматривается множество различных условий интенсивности света и строится более общая модель нелинейного затухания для адаптации к сценам внутри и вне помещений [14, 15]. В этих методах по-прежнему используются характеристики цветности, и если цвет переднего плана ближе к отбрасываемой тени, могут быть некоторые ошибки. Методы, основанные на геометрических объектах, в основном учитывают, что при определенном источнике света, форме и размере тени можно обеспечить взаимосвязь положения между объектами и сегментировать тень от переднего плана [16–18].Эти методы не нуждаются в фоновой модели; однако им нужна подробная информация о форме и другая информация о целях переднего плана. Эти методы ограничены обнаружением определенных объектов, и, кроме того, они требуют отношения положения между объектами и тенью. В случае нескольких теней и нескольких объектов эти методы не работают.
Методы на основе текстуры предполагают, что текстура заштрихованной области неизменна. Эти методы обычно включают в себя следующие шаги: (1) обнаружение переднего плана с тенью и (2) классификация переднего плана как переднего плана или тени на основе корреляции текстур.Если текстура области кандидата аналогична текстуре фона, она может быть ошибочно классифицирована как тень. Леоне и Дистанте [19] предлагают метод движущихся отбрасываемых теней, основанный на функциях Габора и стратегии согласованного преследования. Zhang et al. [20] использует край отношения как отношение между интенсивностью одного пикселя и его соседних пикселей для обнаружения теней. Подтверждая существование теней, Xiao et al. [21] восстанавливают грубые формы объектов и затем извлекают отбрасываемые тени путем вычитания движущихся объектов из одной измененной маски.Методы на основе текстуры эффективны без информации о цвете и устойчивы к изменениям освещения. Однако методы обнаружения теней на основе текстур должны сравнивать соседние пиксели, и их сложность высока.
Как правило, мы должны получить истинные пиксели переднего плана перед обнаружением тени с помощью описанных выше методов. Метод вычитания фона, такой как модель смеси Гаусса (GMM) и ее модифицированные версии, представляют собой некоторые типичные методы обнаружения движущихся пикселей с тенью. Однако в динамической сцене изменяющийся фон определяется как движущийся объект.Чтобы удалить тень напрямую и сделать ее устойчивой к изменениям освещенности, мы представляем модель отношения локальной интенсивности (LIRM), которая показывает инвариантность освещения. Во-первых, мы используем нормализованный коэффициент локальной интенсивности, чтобы заменить пиксель для обнаружения движущегося объекта без тени с помощью модели смеси Гаусса. Во-вторых, эрозия используется для получения контуров движущихся объектов и удаления пятен рассеянных теней и шумов. После этого мы получаем улучшенные контуры движущихся объектов методом улучшения контуров из изображения эрозии и изображения переднего плана.Наконец, мы используем локальную плотность переднего плана и ориентацию контура, чтобы заполнить улучшенные движущиеся объекты дырами. Экспериментальные результаты показывают, что предлагаемый подход позволяет получать движущиеся объекты без отбрасывания теней и демонстрирует отличные характеристики при различных изменяющихся условиях освещения.
Эта статья организована следующим образом. Раздел 2 знакомит с моделью изменения освещенности, представляет LIRM и анализирует его распределение. Процесс модели гауссовой смеси для обнаружения переднего плана и соответствующий алгоритм постобработки описаны в разделе 3.В разделе 4 анализируются результаты обнаружения переднего плана в четырех тестовых видеороликах с различными условиями освещения и сравниваются результаты с другими методами. Наконец, раздел 5 завершает статью.
2. Модель изменения освещения
2.1. Коэффициент локальной интенсивности и инвариант освещенности
Zhang et al. [20] доказали, что край отношения инвариантен к освещению, и использовали его для классификации каждого движущегося пикселя на объект переднего плана или движущуюся тень. Вдохновленные этой работой, мы определяем коэффициент локальной интенсивности и анализируем его инвариантность освещения.
Во-первых, определение коэффициента локальной интенсивности (LIR): где — интенсивность пикселя; — количество пикселей в локальной области; — это локальная область данного пикселя (прямоугольная область), определяемая следующим образом: и — размер местного региона.
Для изображений или видео, снятых фиксированной камерой, значение интенсивности пикселя равно где — коэффициент отражения поверхности объекта в пикселях, то есть коэффициент отражения; — количество световой мощности на площадь поверхности принимаемого объекта в пикселях; чувствительность сенсора камеры.Свет в сценах можно разделить на прямой свет источника света и рассеянный свет окружающей среды. Мы предполагаем, что источник света — это удаленный источник света, а свет — это параллельный свет, такой как солнечный свет. Свет окружающей среды — это рассеянный свет, направление света случайное, а его интенсивность в сценах предполагается постоянной. Если объекты закрыты, сцену можно разделить на три случая: освещенная область, область полутени и область тени [22, 23], а интенсивность света реального целевого пикселя равна где — интенсивность окружающего света; — интенсивность источника света; это переход внутри полутени, который зависит от источника света и геометрии сцены, и; угол между направлением источника света и нормалью к поверхности.
При использовании модели RGB для выражения интенсивности света (4) можно отобразить следующим образом
где — количество цветовых каналов, и 3. Для упрощения в этой статье мы рассматриваем только один источник света и игнорируем влияние разных цветовых каналов.
Анализ отношения локальной интенсивности для трех различных сцен показан на рисунке 1.
Если все локальные регионы принадлежат одной из трех областей, показанных на рисунке 1, то есть, или, или, и,, и выразить освещенную область, область полутени и область тени соответственно, мы можем получить следующие результаты по формулам (4), (3) и (2) и предположить.
Корпус 1 (). Рассмотреть
Футляр 2 (). Рассмотреть
Корпус 3 (). Рассмотреть
Если пиксели находятся в одной и той же локальной области, мы предполагаем, что (1) пиксели в одной и той же локальной области принадлежат одной плоскости объекта, таким образом; (2) чувствительность сенсора камеры во всех локальных регионах одинакова; ; (3) одинаковая интенсивность полутени; .
Согласно предыдущим предположениям, получаем куда .
Из предыдущих предположений и формул (6), (7), (8) и (9) также получаем
Если локальная область относится к одному из трех случаев освещения, на коэффициент локальной интенсивности влияет только отражательная способность. Следовательно, соотношение локальных интенсивностей связано с отражательной способностью поверхности мишени, а не с изменениями и типами освещения, то есть инвариантностью освещения.
В соответствии с формулой (12) местное соотношение интенсивностей пикселей является постоянным при различных условиях освещения.В результате модель локального отношения интенсивностей не только устраняет влияние освещения, но и устраняет тени от целей переднего плана.
2.2. Распределение коэффициента локальной интенсивности
Обычно предполагается, что изображения искажены гауссовым белым шумом, который можно выразить как где представляет фактическое значение пикселя; обозначает реальное значение пикселя в сцене; представляет собой шум. Фактический коэффициент локальной интенсивности определяется как
Обычно,; формулу (14) можно обозначить как где — коэффициент реальной локальной интенсивности:
Если значение пикселя в сцене постоянное, подчиняется гауссовскому распределению белого шума.Следовательно, отношение локальной интенсивности и значение пикселя имеют одинаковое распределение. С другой стороны, если оно мало, белый шум будет усилен.
Теоретически коэффициент локальной интенсивности колеблется от 0 до бесконечности. Чтобы соответствовать объему значения пикселя, нормализованное определение отношения локальной интенсивности выглядит следующим образом:
3. Обнаружение движущихся объектов на основе отношения локальной интенсивности
В этом разделе мы представляем подробную процедуру удаления тени.Предлагаемый метод представляет собой многоступенчатый подход, и блок-схема показана на рисунке 2.
Как правило, методы обнаружения теней используют алгоритмы обнаружения объектов или сегментации изображения для обнаружения переднего плана с тенью, а затем классифицируют передний план как передний план или тень. Согласно результатам, приведенным в предыдущем разделе, отношение локальной интенсивности подчиняется распределению Гаусса. В этом документе нормализованный LIR используется для замены пикселя для обнаружения переднего плана, и этот процесс показан на рисунке 2.В этой статье для получения переднего плана используется модель гауссовой смеси [5]. В смеси гауссианов недавняя история каждого пикселя поддерживается с использованием гауссовских распределений, а значение обычно выбирается от 3 до 5. Каждое распределение имеет связанные атрибуты, такие как вес, среднее значение и дисперсия. Каждый гауссиан обновляет свои параметры, используя LIR в каждом новом кадре.
После обнаружения переднего плана может быть получена цель переднего плана с небольшой тенью (далее так называется изображение переднего плана).Между тем, некоторые части объекта переднего плана могут быть темнее фона и легко ошибочно распознаваться как фон. Ложно обнаруженные участки тени дискретны; ложно обнаруженные части движущегося объекта, такие как дыры, окружены пикселями переднего плана (такими как контур). Контур движущихся объектов может быть обнаружен, а контур теней может быть удален в большинстве случаев. Чтобы улучшить качество движущихся объектов без дискретных пятен теней, используется эрозия для стирания разброса и шумов, а также для получения контуров движущихся объектов изображения без тени (далее так называемое контурное изображение).Затем контурное изображение используется для улучшения движущихся объектов методом улучшения контуров. Процедура улучшения следующая: для пикселя, не являющегося пикселем переднего плана в изображении контуров, мы вычисляем взвешенное соотношение пикселей переднего плана локальной области в контурном изображении и изображении переднего плана следующим образом: где представляет скорость улучшенных контуров движущегося объекта в, — количество пикселей переднего плана в соседней области пикселя в контурном изображении, — количество пикселей переднего плана в соседней области пикселя в изображении переднего плана, и — вес для контурное изображение и изображение переднего плана.Мы выбираем в наших экспериментах. — количество пикселей в локальной области; — это локальная область данного пикселя (прямоугольная область), определенная как в (2).
С другой стороны, мы рассматриваем восемь направлений пикселя, определяем, есть ли пиксель переднего плана в каждом направлении локальной области, и подсчитываем, сколько раз он достигает пикселей переднего плана, как показано на рисунке 3: где означает, есть ли пиксель переднего плана в направлении th, и если он существует, его значение равно 1, в противном случае — 0.- соотношение переднего плана в восьми направлениях. После вычисления и проверки того, находится ли и пикселя в допустимом диапазоне, пиксель определяется с помощью где и — пороговые значения.
Итак, мы получили улучшенное изображение контуров переднего плана (так называемое улучшенное контурное изображение переднего плана). Однако некоторые пиксели движущегося объекта ложно обнаруживаются как пиксели фона, например, отверстия в изображении. Чтобы получить цельный объект переднего плана, мы используем метод заливки, чтобы исключить ложно обнаруженный пиксель для фонового пикселя (рисунок 4).Для пикселя, который определяется как пиксель фона в улучшенном контурном изображении переднего плана, мы сначала рассматриваем восемь направлений пикселя: определяем, есть ли пиксель переднего плана в каждом направлении локальной области, и подсчитываем, сколько раз он достигает пикселей переднего плана, как выражено в (19). Мы также учитываем соотношение в локальной области между количеством пикселей переднего плана в изображении переднего плана и в контурном изображении и количеством пикселей в той же области: где — соотношение пикселей, обнаруженных как передний план в локальной области, — это количество пикселей, которые обнаруживаются как передний план, и является суммой пикселей в локальной области.
После вычисления и мы можем получить опцию, перемещает пиксель объекта или нет, используя где и — пороговые значения; обозначает окончательное значение пикселя.
4. Результаты эксперимента
В этом разделе мы описываем тестовые видеоролики, использованные в этом исследовании, измеряем производительность предложенного метода и сравниваем производительность с современными методами. Как правило, современные методы используют разные шаги для удаления тени и уменьшения влияния изменений освещения.Чтобы сравнить с другими методами на разных этапах, мы сначала сравниваем результаты удаления тени, а затем сравниваем результаты при различных условиях изменения освещения в разных наборах данных.
4.1. Условия эксперимента и установка параметров
Размер локальной прямоугольной области в (2) важен для предлагаемого метода. Если размер слишком большой, его внутренняя область не может соответствовать предположениям (9). С другой стороны, если он слишком мал, изменение его значения также невелико. В нашем эксперименте установлено 2.
4.2. Результаты эксперимента
Чтобы проверить эффект удаления тени на основе соотношения локальной интенсивности и эффект обнаружения переднего плана, мы используем четыре типичных видеоролика из видеонабора ATON [4] в качестве тестовых видеороликов: кампус, коридор, шоссе 1, и Интеллектуальная комната. Интеллектуальная комната и прихожая — типичная внутренняя среда. В видеороликах люди идут по сцене, и их тени отображаются на фоне. «Кампус» — это видео с парковки кампуса, на которой видны тени людей и машин.
Чтобы сравнить производительность предложенного метода обнаружения движущихся объектов с другими методами обнаружения теней, мы предполагаем, что если тень обнаруживается как фон, это правильное обнаружение, в противном случае это ложное обнаружение, и если движущийся объект обнаруживается как передний план, он правильное обнаружение, в противном случае это ложное обнаружение. Предлагаемый метод сравнивается с пятью методами, представленными в [2]: методом на основе цветности, физическим методом, методом на основе геометрии, методом на основе текстуры малых областей (SR) и методом на основе текстуры больших областей (LR).Чтобы оценить эффект этих методов, скорость обнаружения теней () и скорость различения теней () являются параметрами различения [4], и их определения следующие: где тень; находится на переднем плане. — количество правильно обнаруженных пикселей; — количество теневых пикселей, которые ошибочно определены как передний план; — количество пикселей переднего плана, правильно обнаруженных после удаления теней. — количество пикселей переднего плана, которые ошибочно определяются как тень.Скорость различения теней связана с поддержанием пикселей, которые принадлежат движущемуся объекту, в качестве переднего плана. В этой статье мы используем среднее из двух показателей в качестве единого показателя производительности (avg).
В таблице 1 представлены результаты сравнения метода, основанного на LIRM, и других методов из [2]. В таблице 1 показаны средние показатели обнаружения и дискриминации теней для каждой тестовой последовательности. Судя по результатам сравнения, метод, предложенный в этой статье, в большинстве случаев лучше. Основная причина заключается в том, что представленный метод непосредственно определяет передний план из видеоданных, но другие методы извлекают тень из переднего плана по истинному фону и передний план с тенью.Наш метод использует коэффициент локальной интенсивности для замены фактических значений пикселей; сложность ниже. Рисунок 6 является результатом предложенного метода обнаружения движущихся объектов без тени в различных сценах.
2.3. Расчет направления большой осиВ этом исследовании предполагается, что каждый объект переднего плана имеет форму эллипса и соответствует виртуальному эллипсу.Ориентация разделенного объекта определяется как направление большой оси согласованного эллипса разделенного объекта. Центр согласованного эллипса определяется как центроид разделенного объекта. Направление можно найти, вращая разделенный объект по часовой стрелке с осью вращения в центроиде, пока разница между максимальной и минимальной y-координатами пикселей в повернутом разделенном объекте не будет минимизирована. Центроид разделенного объекта можно определить следующим образом.(xcPOk, ycPOk) = ∑NkxiPOkNk, ∑NkyiPOkNk, (2) где xiPOk, yiPOk и Nk представляют координаты x и y i-го пикселя переднего плана и количество пикселей переднего плана в k-м секционированном объекте, соответственно. Угол между главной осью разделенного объекта и горизонтальной осью, как показано на Рисунке 8, выглядит следующим образом.θPOk = argminθmaxy∈POkθy-miny∈POkθy, (3) где POkθ представляет объект из разбитого объекта POk, повернутый на угол θ по часовой стрелке.На рисунке 9 показаны разделенные объекты после анализа вертикальной гистограммы и после вычисления их главных осей. Если нижний левый угол видеокадра установлен в начало координат, большая ось может быть представлена следующим линейным уравнением.l (x) = tanθPOk · (x-xcPOk) + ycPOk. (4) 2.4. Области источников светаОбласти теней в видеопоследовательностях в ночное время формируются искусственными источниками света; их размеры и ориентация определяются их смещением от источников света.Чтобы оценить ориентацию каждой тени, необходимо знать расположение источников света. Источники света в видеопоследовательностях в ночное время обычно являются не точечными источниками, а окружающими источниками из зданий или явных участков внутри или за пределами видеокадра, как показано на рисунке 10. Поскольку трудно оценить точное расположение или области источников света, области источники света настраиваются вручную вне видеокадра, как показано на рисунке 10.Хотя источники света могут существовать внутри видеокадра, области источников света конфигурируются в левой области RL или правой области RR вне видеокадра с учетом ориентации теневых областей, сформированных внутри видеокадра.Может существовать несколько RLS в RL или RR, и общая площадь RLS в RL или RR может быть равна или меньше, чем у RL и RR. В предложенном алгоритме обнаружения тени, если большая ось разделенного объекта проходит через RLS, этот разделенный объект считается тенью. Если источники света существуют в области RB, область каждого объекта переднего плана перекрывается значительной частью его области тени. Хотя некоторые выступы от объекта переднего плана могут существовать из-за тени, существует небольшая проблема, связанная с обнаружением области переднего плана, состоящей из объекта и его тени, как одного объекта, поскольку области выступов не очень большие.Если источники света существуют в области RT, трудно использовать только ориентацию каждого разделенного объекта для обнаружения тени, потому что область тени не перекрывает объект переднего плана и ее ориентация аналогична ориентации объекта переднего плана. Хотя в этом случае требуются другие функции, такие как цвет и текстура, например, при удалении дневных теней, камеры редко устанавливаются в таких средах с источниками света; скорее, они устанавливаются в помещениях, где нет контрсвета.Поэтому в данном исследовании, как указано в разделе 2.1, предполагается, что источники света существуют в регионах, отличных от области RT.2,5. Обнаружение и удаление теневых областейДля каждого разделенного на разделы объекта, если ориентация объекта направлена в сторону RLS, он классифицируется как тень. Индикатор тени для каждого разбитого на разделы объекта задается следующим образом.S (POk) = 1, x, l (x) ∈RLS, ∀x∈RLSX0, иначе (5) где RLSX представляет собой возможный x-диапазон RLS. Значение 1 представляет область тени; 0 представляет объект переднего плана.Индикатор тени используется для создания теневой маски для видеокадра; конечные объекты переднего плана получаются путем маскирования теневых областей из входных областей переднего плана. 4. ВыводыВ этой статье предлагается новый алгоритм обнаружения теней для выделения объектов в видеопоследовательностях в ночное время; этот алгоритм проверяет возможные ориентации тени в сторону источников света. Каждая извлеченная область переднего плана разделяется с помощью обнаружения изменения вертикальной гистограммы на основе двойного сканирования, каждый разделенный объект сопоставляется с эллипсом, и ориентация согласованного эллипса используется для проверки правильности разделенного объекта как тени.Предлагаемый алгоритм демонстрирует достаточно точное удаление тени в видеопоследовательностях в ночное время с одним объектом или несколькими объектами с коэффициентом удаления тени 93,8%; этот алгоритм улучшает производительность извлечения объектов, подавляя интерференцию между соседними объектами, вызванную их теневыми областями. Предложенный алгоритм обнаружения теней в сочетании с обычным алгоритмом обнаружения теней в дневное время может круглосуточно использоваться в интеллектуальных системах видеонаблюдения для обнаружения предварительно настроенных событий наблюдения на основе извлечения объекта. Предлагаемый алгоритм имеет ограничение при обработке небольших разделенных объектов, таких как небольшие области тени между объектами и неполные области переднего плана, ориентации которых явно не различимы. Это ограничение можно устранить, применив функции, используемые при удалении дневных теней, такие как цвет и текстура, или используя информацию отслеживания объекта. Сравнительное исследование с подходом машинного обучения также необходимо для различных сред видеонаблюдения. Эти темы будут оставлены для дальнейшего изучения. Чем (и почему) визуальный контроль действия отличается от визуального восприятияProc Biol Sci. 2014 июн 22; 281 (1785): 20140337. Институт мозга и разума, Университет Западного Онтарио, Лондон, Онтарио, Канада, N6A 5B7 Поступила 11 февраля 2014 г .; Принято 27 марта 2014 г. Copyright © 2014 Автор (ы) Опубликовано Королевским обществом. Все права защищены.Эта статья цитировалась в других статьях в PMC.AbstractВидение не только дает нам подробные знания о мире за пределами нашего тела, но также направляет наши действия по отношению к объектам и событиям в этом мире.Вычисления, необходимые для видения для восприятия, сильно отличаются от вычислений, требуемых для видения для действия. В первом случае используются реляционные метрики и рамки отсчета на основе сцены, а во втором — абсолютные показатели и рамки отсчета на основе эффекторов. Эти конкурирующие требования к зрению сформировали организацию зрительных путей в мозгу приматов, особенно в зрительных областях коры головного мозга. Вентральный «перцептивный» поток, проецирующийся из ранних зрительных областей в нижнюю височную кору, помогает создавать богатые и подробные визуальные представления мира, которые позволяют нам идентифицировать объекты и события, придавать им значение и значение и устанавливать их причинные отношения.Напротив, дорсальный поток « действия », проецирующийся из ранних зрительных областей в заднюю теменную кору, играет решающую роль в управлении действиями в реальном времени, преобразуя информацию о местоположении и расположении целевых объектов в системы координат эффекторы, используемые для выполнения действия. Идея двух зрительных систем в одном мозгу может показаться изначально нелогичной. Наше визуальное восприятие мира настолько убедительно, что трудно поверить, что какой-то другой достаточно независимый визуальный сигнал — тот, о котором мы не подозреваем — направляет наши движения.Но данные широкого спектра исследований, от нейропсихологии до нейровизуализации, показали, что зрительные сигналы, которые дают нам наше восприятие объектов и событий в мире, не те же, что контролируют наши действия. Ключевые слова: зрительное восприятие, зрительно-моторный контроль, вентральный поток, дорсальный поток, зрительные иллюзии 1. ВведениеВидение дает нам наиболее непосредственное восприятие мира за пределами нашего тела. Хотя мы могли слышать, как ветер свистит сквозь деревья, и внезапный раскат грома, видение позволяет нам оценить приближающуюся бурю во всем ее величии: клубящиеся облака, вспышка молнии, меняющиеся тени на склоне холма и приближающиеся листы дождь.Непосредственность такого опыта сделала видение наиболее изученным — и, возможно, наиболее понятным — из всех человеческих чувств. Многое из того, что мы узнали о том, как работает зрение, получено в результате психофизических экспериментов, в которых исследователи представляют людей визуальным дисплеем и просто спрашивают их, могут ли они увидеть стимул на дисплее или отличить один видимый стимул от другого. Записывая ответы наблюдателей при систематическом изменении физических свойств зрительных стимулов, исследователи накопили огромное количество информации о взаимосвязи между визуальной феноменологией и физикой света, а также о том, что идет не так, когда разные части визуального система повреждена. Vision не только позволяет нам воспринимать мир, но и обеспечивает точный контроль над движениями, которые мы совершаем в этом мире — от повседневного акта принятия утренней чашки кофе до экспертного возвращения особенно хорошо доставленной порции. в игре в теннис. Тем не менее, за заметным исключением движений глаз, которые обычно рассматривались как поиск информации, дополняющий зрительное восприятие, мало внимания уделялось тому, как зрение используется для программирования и управления нашими действиями, особенно движениями нашего тела. руки и конечности.Одна из причин, по которой визуальный контроль действий так долго игнорировался, — это распространенное убеждение, что одно и то же визуальное представление мира, которое позволяет нам воспринимать объекты и события, также направляет наши действия по отношению к этим объектам и событиям. Однако, как я обрисую в этой статье, это основанное на здравом смысле представление о том, как работает видение, неверно (философское обсуждение этого вопроса см. В [1]). Данные широкого круга исследований ясно показали, что зрение не является единой системой и что управление умелыми действиями зависит от зрительных процессов, которые совершенно отделены от тех, которые опосредуют восприятие. Конечно, исследователям было бы удобно, если бы зрение было единой и единой системой. Если бы это было так, то то, что мы узнали из психофизических исследований визуального восприятия, можно было бы полностью обобщить на визуальный контроль действия. Но реальность такова, что визуальная психофизика мало что может сказать нам о том, как зрение управляет нашими движениями. Это потому, что психофизика полностью зависит от сознательного отчета: наблюдатели в психофизическом эксперименте рассказывают экспериментатору о том, что они переживают.Но не эти переживания побуждают к умелым действиям. Как я расскажу ниже, управление действием зависит от визуальных процессов, которые сильно отличаются от тех, которые приводят к восприятию, и эти процессы задействуют совершенно разные нейронные цепи. Кроме того, действия по управлению визуальной информацией часто недоступны для сознательного отчета. По всем этим причинам традиционная психофизика не может дать достаточно информации о визуальном управлении движением или рассказать нам что-нибудь о нейронных субстратах этого контроля.Необходимы совершенно разные подходы, в которых параметры зрительных стимулов систематически варьируются и измеряется влияние этих изменений на выполнение умелых действий. К счастью, за последние два десятилетия появилась новая «зрительно-моторная психофизика», которая занимается именно этим. Сегодня исследователи изучают способы использования зрения для управления широким спектром сложных целенаправленных действий — и изучают, как мозг опосредует этот контроль.Были выдвинуты новые модели функциональной организации зрительных путей в коре головного мозга приматов — модели, которые бросают вызов старым монолитным представлениям о том, как работает зрительная система. В этом обзоре я прослежу некоторые направления исследований, которые позволили по-новому взглянуть на роль видения в программировании и контроле действий и сделали изучение видения для действия яркой частью исследовательского предприятия в области видения. 2. Нейропсихологическая диссоциация между восприятием и действиемВ 1980-х годах исследования зрительных способностей здоровых людей-наблюдателей выявили поразительное несоответствие между визуальным контролем над умелыми действиями и психофизическими отчетами (напр.грамм. [2,3]). К началу 1990-х годов [4] Дэвид Милнер и я показали, что эти диссоциации между видением для действия и видением для восприятия могут быть отображены на двух выдающихся потоках визуальных проекций, которые возникают из первичной зрительной коры головного мозга: дорсальной зрительный поток проецируется в заднюю теменную кору, а вентральный поток — в нижневисочную кору [5]. Согласно нашему описанию двух визуальных систем [4,6,7], спинной поток играет критическую роль в управлении действиями в реальном времени, преобразуя текущую информацию о местоположении и расположении объектов в системы координат эффекторов, используемых для выполнения действия.Напротив, вентральный поток (вместе с соответствующими когнитивными сетями) конструирует богатые и подробные визуальные представления мира, которые позволяют нам идентифицировать объекты и события, приписывать им значение и значение и устанавливать их причинные связи. Такие операции необходимы для накопления и доступа к визуальной базе знаний о мире. Вдобавок вентральный поток обеспечивает перцептивную основу для автономного управления действиями, проецирования запланированных действий в будущее и включения сохраненной информации из прошлого в управление текущими действиями.Напротив, обработка в спинном потоке не создает визуальных восприятий; он генерирует умелые действия (частично за счет модуляции более древних зрительно-моторных модулей в среднем мозге и стволе мозга; см. [8]). Как и следовало ожидать, эти два потока сильно взаимосвязаны [9,10], но в то же время они играют взаимодополняющие роли в производстве адаптивного поведения. Конечно, дорсальный и вентральный потоки играют и другие роли. Напр., Спинной поток вместе с участками вентрального потока играет роль в пространственной навигации — а области спинного потока, по-видимому, участвуют в некоторых аспектах рабочей памяти [9].Однако в этом обзоре я сосредоточусь на соответствующих ролях двух потоков в восприятии и действии. Итак, как мы пришли к предложению разделения труда между двумя визуальными потоками? Наши первые выводы пришли из исследований визуальных способностей неврологического пациента, известного по инициалам Д.Ф. [4,11]. Д.Ф. развила визуальную форму agnosia после того, как была преодолена угарным газом из неисправного водонагревателя. Несмотря на то, что «низкоуровневые» визуальные способности Д.Ф. остались относительно нетронутыми, она больше не могла узнавать повседневные предметы или лица своих друзей и родственников; при этом она не могла определить даже простейшие геометрические формы.Следует подчеркнуть, что Д.Ф. не испытывает затруднений с определением цвета или визуальной текстуры объекта — и может легко сказать, например, сделан ли объект из металла, дерева или другого вещества на основе свойств его поверхности [12]. У нее проблемы с формой предмета. В то же время у нее нет проблем с распознаванием формы знакомых предметов на ощупь. Ее недостаток в распознавании формы полностью ограничен зрением. Чем примечателен Д.Ф.Однако в том, что она демонстрирует поразительно точное руководство движениями своей руки, когда пытается поднять те самые объекты, которые не может идентифицировать. Например, когда она тянется, чтобы схватить предметы разной ширины, ее рука открывает более широкую середину полета для более широких предметов, чем для более узких, точно так же, как это происходит у людей с нормальным зрением [11]. Точно так же она довольно нормально вращает рукой и запястьем, когда она тянется, чтобы схватить предметы в разной ориентации, и правильно кладет пальцы на поверхность предметов разной формы [13].В то же время она совершенно неспособна различить какие-либо из этих объектов, когда они представлены ей в простых тестах на различение. Она даже терпит неудачу в ручных задачах «сопоставления», в которых ее просят показать ширину объекта, открыв указательный и большой палец на соответствующую величину. Хотя некоторые утверждали, что ограниченная способность Д.Ф. масштабировать захватывающую руку по ширине объекта больше зависит от тактильной обратной связи, чем от обычного визуального контроля с прямой связью [14], недавняя работа показала, что это не так, и подтвердила более ранние наблюдения, что Д.Ф. использует зрение для программирования и управления своим хватанием почти так же, как неврологически здоровые люди [15]. Наличие ограниченного визуального контроля схватывания наряду с нарушением различения форм предоставило дополнительную поддержку идее о том, что видение для действия зависит от механизмов, которые совершенно отделены от тех, которые опосредуют видение для восприятия. Но именно природа повреждения мозга Д.Ф. дала важный ключ к пониманию того, как эти различные механизмы могут быть реализованы в нейронных схемах.Ранняя структурная МРТ [16] показала признаки обширного двустороннего повреждения вентрального зрительного потока. Более поздние МРТ с высоким разрешением [17,18] подтвердили это повреждение вентрального потока, но показали, что поражения сосредоточены в боковой затылочной коре (область LO), области, которая, как мы теперь знаем, участвует в визуальном распознавании объектов. , в частности их геометрическое строение [19]. Несмотря на то, что это избирательное повреждение области LO, по-видимому, нарушило способность Д.Ф. воспринимать форму объектов, повреждения не повлияли на ее способность использовать визуальную информацию о форме для формирования ее руки, когда она протягивает руку и берет предметы. Мы предположили, что удерживаемый визуально управляемый захват D.F. опосредован интактными зрительно-моторными механизмами в ее дорсальном потоке, который, хотя и демонстрирует некоторые свидетельства истончения коры в теменно-затылочном соединении, по-видимому, в значительной степени не поврежден [18]. Частично эта идея возникла в результате исследований, показывающих, что пациенты с повреждением спинного мозга очень часто демонстрируют паттерн дефицита и сохраненных способностей — противоположность тому, что наблюдалось у D.F. Действительно, с начала двадцатого века было известно, что пациенты с поражениями задней теменной коры могут иметь проблемы со зрением для направления захвата или прицельного движения к правильному местоположению визуальной цели, размещенной в различных положениях в поле зрения, в частности периферическое поле зрения [20].Этот дефицит часто называют зрительной атаксией (вслед за Балинтом [20]). Но даже несмотря на то, что эти пациенты демонстрируют крайне плохой зрительно-моторный контроль, они часто могут довольно точно судить об относительном положении объекта в пространстве [21,22]. Конечно, следует отметить, что эти пациенты обычно не испытывают затруднений с использованием данных других сенсорных систем, таких как проприоцепция или слух, для управления своими движениями [20]. Некоторые пациенты с повреждением спинного канала не могут использовать визуальную информацию, чтобы вращать руку, масштабировать захват или правильно настраивать пальцы, когда протягивают руку, чтобы поднять объект, даже если у них нет проблем с описанием ориентации, размера или формы объектов. в этой части поля зрения. Именно эта убедительная двойная диссоциация между эффектами повреждения вентрального и дорсального потоков изначально привела нас к предложению модели двух зрительных систем. Модель также подтверждается множеством сходных данных нейрофизиологических исследований на обезьянах и, совсем недавно, исследованиями нейровизуализации как у неврологических пациентов, так и у здоровых людей (обзоры см. [6,23,24]). В §3 я выделяю некоторые из работ по нейровизуализации, в которых рассматривалась активация мозга Д.Ф., когда она выполняет задачи восприятия и действия. 3. Нейровизуализационные исследования вентрального и дорсального потоковС появлением функциональной магнитно-резонансной томографии (фМРТ) количество исследований функциональной организации вентрального потока человека выросло в геометрической прогрессии. Ранее было показано, что область LO, которая расположена в вентролатеральной части затылочно-височной коры, принимает непосредственное участие в распознавании объектов (см. Обзор [19]). Как упоминалось ранее, Д.Ф. имеет двусторонние поражения, которые включают область LO в обоих полушариях.Поэтому неудивительно, что исследование активности мозга Д.Ф. с помощью фМРТ не выявило дифференциальной активации для штриховых рисунков обычных объектов (по сравнению с зашифрованными версиями) где-либо в оставшемся вентральном потоке Д.Ф., что отражает ее плохую работу по идентификации объектов, изображенных на рисунках. [17]. Когда здоровым участникам контрольной группы были представлены такие же линейные рисунки, они продемонстрировали сильную двустороннюю активацию области LO. Фактически, когда мозг контрольных участников был математически преобразован в соответствие с Д.В мозге Ф. активация, связанная с формой, в этих здоровых мозгах почти полностью совпадала с поражениями LO в мозге Д.Ф. Эти результаты нейровизуализации, которые дополняют более ранние нейропсихологические тесты распознавания объектов, проведенные Д.Ф. [12], настоятельно предполагают, что область LO играет решающую роль в восприятии формы. Хотя Д.Ф. не может различать ширину разных объектов из-за повреждения ее вентрального потока, ее хватающая рука чувствительна к ширине объекта, когда она тянется, чтобы поднять его [11].Нейровизуализация мозга Д.Ф. показала, что она избавилась от визуально управляемого захвата у Д.Ф. сопровождается устойчивой активацией в области спинного потока, которая обычно активируется у здоровых контрольных участников, выполняющих те же задачи [17]. Эта область расположена в передней части внутри теменной борозды в той же области задней теменной коры, которая, как было показано, участвует в визуально управляемом захвате у обезьян [25,26] (у обезьян это называется AIP, а у человека — hAIP. ; видеть ).Важно отметить, что область LO в вентральном потоке не активируется по-разному, когда люди протягивают руку и хватают объекты [26,27], предполагая, что эта область распознавания объектов в вентральном потоке не требуется для программирования и управления визуально управляемым захватом, и что hAIP и другие сети задней теменной коры (в сочетании с премоторной и моторной областями) могут делать это независимо (). Идея о том, что hAIP специализируется на визуальном контроле схватывания, подтверждается тем фактом, что пациенты с поражениями спинного тракта, которые в значительной степени ограничены hAIP, демонстрируют дефицит схватывания, но сохраняют способность дотянуться до объектов [28]. Нейровизуализация захвата под визуальным контролем. На двух панелях в верхнем левом углу изображен «захват» Джеймса и др. . [17] используется для представления воспринимаемых объектов участникам сканера. Различные задние освещенные целевые объекты могли быть представлены от испытания к испытанию на захватном устройстве, вращая восьмисторонний барабан с пневматическим приводом. Участникам было предложено либо схватить объект, либо просто протянуть руку и коснуться его тыльной стороной руки. Обратите внимание, что эксперимент обычно проводится в темноте, когда виден только освещенный целевой объект.График в левом нижнем углу показывает динамику активации hAIP, когда здоровый участник протянул руку и схватил объект (зеленый), в сравнении с тем, когда она протянула руку и просто коснулась объекта тыльной стороной ладони, не образуя хватки (красный ). Расположение hAIP отображается на левом полушарии мозга (и на вставке) в правой части рисунка. (Другие специфические для хватания активации, показанные на мозге, относятся к моторной и соматосенсорной корке.) Обратите внимание, что в области LO (окруженной синим прямоугольником) нет дифференциальной активации хватания.По материалам Culham et al. [26]. AIP человека — одна из многих зрительно-моторных областей, которые были идентифицированы в спинном потоке за последнее десятилетие [29,30]. Была идентифицирована область внутри теменной борозды задней теменной коры, которая активируется, когда участники эксперимента по нейровизуализации переключают свой взгляд (или скрытое внимание) на зрительные цели, первоначально представленные на зрительной периферии [29,31,32]. Как мы видели ранее, поражения, связанные с неправильным доступом, определяющим атаксию зрительного нерва, обычно обнаруживаются в дорсальном русле [21,22].Более поздний количественный анализ [33] участков поражения, связанных с неправильным дотягиванием и другими нарушениями в визуально управляемом движении, выявил несколько ключевых областей в спинном потоке, которые отображаются на областях, выявленных в недавних исследованиях фМРТ с визуальным контролем [34,35]. Взятые вместе, вся эта работа хорошо сходится с результатами более ранних нейропсихологических исследований, предполагающих, что спинной поток играет решающую роль в визуальном контроле за умелыми действиями. Стоит отметить, что не все визуальные входы в зрительно-моторные сети в спинном потоке исходят из V1.В течение долгого времени было известно, что люди (и обезьяны) с большими двусторонними повреждениями V1 все еще способны выполнять многие действия, управляемые зрительно, несмотря на то, что в остальном они слепы в отношении управляющих стимулов (для обзора см. [6,36,37 ]). Многие из этих остаточных зрительных способностей, названных Вейскранцем и его соавторами «слепым зрением» [38], почти наверняка зависят от проекций, которые обходят геникулостриатный путь, таких как проекции, идущие от глаза к верхнему бугорку, межслойным слоям спинного мозга. латеральное коленчатое ядро или даже непосредственно к пульвинарию.Накапливаются доказательства того, что визуальная информация, передаваемая этими экстрагеникулостриатными проекциями, достигает дорсального потока (см. Обзор [24]). 4. Различные метрики и системы отсчета для восприятия и действияНо почему визуальные процессы, лежащие в основе визуального восприятия, отделены от тех, которые опосредуют визуальный контроль действия? Ответ на этот вопрос заключается в различии вычислительных требований видения для восприятия, с одной стороны, и видения для действия, с другой.Например, чтобы иметь возможность успешно схватить объект, зрительно-моторная система должна иметь дело с фактическим размером объекта, а также с его ориентацией и положением относительно руки, используемой для его поднятия. Эти вычисления должны отражать реальные показатели мира или, по крайней мере, использовать изученные «справочные таблицы», которые связывают нейроны, кодирующие определенный набор сенсорных входов, с нейронами, кодирующими желаемое состояние конечности [39 ]. Время, в которое выполняются эти вычисления, не менее важно.По мере того как мы перемещаемся, эгоцентрическое положение целевого объекта меняется от момента к моменту — и, как следствие, требуемые координаты для действия необходимо вычислять в тот самый момент, когда выполняется движение. Напротив, зрение для восприятия действительно имеет дело с реальными размерами объектов или их местоположением по отношению к нашим рукам и конечностям — факт, который объясняет, почему у нас нет проблем с просмотром телевизора, среды, в которой нет абсолютные показатели вообще. Наши перцептивные представления используют основанную на сцене систему отсчета, которая кодирует размер, ориентацию и расположение объектов относительно друг друга.Работая с перцептивными представлениями, основанными на объектах или сценах, мы можем поддерживать постоянство размера, формы, цвета, яркости и относительного местоположения в различных условиях просмотра. Продукты восприятия доступны в течение гораздо более длительного периода времени, чем визуальная информация, используемая для управления действием. Создание долгосрочных представлений позволяет нам идентифицировать объекты, когда мы снова сталкиваемся с ними, придавать им смысл и значение и устанавливать их причинные связи — операции, которые необходимы для накопления знаний о мире. Эти различия в показателях, системах отсчета и времени видения для действия и видения для восприятия можно увидеть в поведении здоровых наблюдателей, выполняющих задачи, которые требуют либо умелых целенаправленных движений, либо явных визуальных суждений о них. те же зрительные раздражители. Некоторые из наиболее ярких демонстраций диссоциации между видением для действия и видением для восприятия обсуждаются в §5. 5. Доказательства диссоциации восприятия-действия от поведенческих исследований у нормальных наблюдателейХотя у нас есть сильное впечатление, что наше восприятие объекта и визуальный контроль действий, которые мы направляем на этот объект, зависят от одного и того же визуального представления [1], более 30 лет работы в лаборатории показали, что это не так.Некоторые из самых ранних и наиболее убедительных доказательств разделения между процессами, лежащими в основе видения для восприятия и видения для действия у здоровых наблюдателей, были получены в экспериментах, в которых цель непредсказуемо перемещалась в новое место во время быстрого движения глаз (саккада). ) направлен в сторону исходного местоположения цели [3,40,41]. В этих экспериментах участники обычно не сообщали о смещении цели, даже если более поздняя корректирующая саккада или ручное прицельное движение точно отражали изменение положения цели.Даже когда участникам этих экспериментов сказали, что цель будет смещаться во время движения глаз в некоторых испытаниях, они не могли не догадаться, произошло ли такое смещение. Эти и другие эксперименты с использованием той же парадигмы (для обзора см. [42]) последовательно показали, что участники не воспринимают изменения в целевой позиции, даже если они изменяют свои визуально управляемые движения глаз и рук, чтобы приспособиться к новому положению цели. Неспособность обнаружить изменение положения зрительного стимула после быстрого движения глаз может отражать « широкую настройку » механизмов перцептивного постоянства, которые сохраняют кажущуюся стабильность объекта в пространстве, поскольку его положение на сетчатке смещается во время движение глаз. Такие механизмы необходимы, если наше восприятие мира должно оставаться стабильным при движении наших глаз — и пространственное кодирование этих механизмов не требует точной настройки. Однако системы действий, управляющие целенаправленными движениями, должны быть гораздо более чувствительны к точному положению цели, и, как следствие, они будут почти идеально компенсировать реальные изменения в целевой позиции, к которым система восприятия может быть весьма непреклонной. .Таким образом, из-за различных требований систем восприятия и действия иллюзорное перцептивное постоянство целевого положения может поддерживаться перед лицом значительных изменений в зрительно-моторном контроле. Также наблюдались дополнительные диссоциации между восприятием и действием, при которых восприятием визуального стимула можно манипулировать, в то время как визуально управляемое движение, направленное на стимул, остается неизменным. Бриджман и др. . [2], например, показали, что даже несмотря на то, что фиксированная визуальная цель, окруженная движущейся рамкой, кажется, дрейфует в направлении, противоположном направлению кадра, когда наблюдатели совершают быстрое прицельное движение пальцем, они продолжают указывать на точное местонахождение цели.Однако в контексте изложенных выше аргументов такой результат неудивителен. Системы восприятия в значительной степени озабочены относительным положением стимулов в визуальном массиве, а не их абсолютным положением в эгоцентрической системе отсчета. Для систем действия, конечно, решающее значение имеет абсолютное положение зрительного стимула, поскольку соответствующий эффектор должен быть направлен в это место. Таким образом, воспринимаемое изменение положения цели может происходить, несмотря на то, что движение, направленное на цель, остается неизменным — и, как мы видели в экспериментах, описанных выше [3,40,41], «реальное» изменение в положение цели (в эгоцентрической системе координат) может привести к корректировке двигательной активности, даже если это изменение не воспринимается участником. Пространственное расположение целевого объекта — не единственная визуальная характеристика, которая демонстрирует четкую диссоциацию между восприятием и действием. Например, наши перцептивные суждения о размере объекта зависят от контекста, в котором они рассматриваются. Например, когда мы видим человека среднего роста, стоящего рядом с профессиональным баскетболистом, этот человек может показаться намного ниже, чем они есть на самом деле. В литературе по восприятию есть много примеров иллюзий размерного контраста, в которых восприятие размера объекта не соответствует его реальному размеру.Одной из таких иллюзий является знакомая иллюзия Эббингауза, в которой представлены два целевых круга равного размера, каждый из которых окружен круговым массивом либо меньших, либо больших кругов. Наблюдатели обычно сообщают, что целевой круг, окруженный меньшими кругами, кажется больше, чем другой целевой круг ( a ). Хотя такие контекстные манипуляции явно влияют на восприятие размера, можно ожидать, что масштабирование захватывающего движения, направленного к центральным кругам, может избежать этой и других иллюзий контрастности размеров.В конце концов, во многих ситуациях очень важно точно схватить цель, даже если контекстные подсказки могут исказить восприятие. Влияние иллюзии размерного контраста на восприятие и действие. Панель ( a ) демонстрирует традиционную иллюзию Эббингауза, в которой центральный круг в кольце больших кругов обычно меньше, чем центральный круг в кольце меньших кругов, хотя оба центральных круга на самом деле имеют одинаковый размер. Панель ( b ) показывает тот же дисплей, за исключением того, что центральный круг в кольце больших кругов был немного увеличен.Как следствие, два центральных круга теперь кажутся одинакового размера. Панель ( c ) показывает экспериментальную установку, в которой участник должен был протянуть руку и взять один из двух дисков, которые были помещены на иллюзорный дисплей. Панель ( d ) показывает отверстие для захвата для двух испытаний, в которых участник взял малый диск в одном испытании и большой диск в другом с дисплея, показанного на панели ( b ). Несмотря на то, что два центральных диска воспринимались как имеющие одинаковый размер, отверстие для захвата в полете отражало реальный, а не кажущийся размер дисков.По материалам Aglioti et al . [43]. Первая демонстрация того, что хватание может быть нечувствительным к иллюзии Эббингауза, была проведена Аглиоти и др. . [43]. Они построили трехмерную версию иллюзии Эббингауза, в которой диск типа фишки для покера был помещен в центр двумерного кольца, образованного либо меньшими, либо большими кругами ( b ). Использовались две версии дисплея Эббингауза. В одном случае, традиционная иллюзия, два центральных диска были физически идентичны по размеру, но один оказался больше другого ( a ).Во втором случае размер одного из дисков был скорректирован так, чтобы теперь два диска были идентичны по восприятию, но имели разные физические размеры ( c ). Несмотря на то, что участники этого эксперимента испытали мощную иллюзию размера, их апертура упреждающего захвата не была затронута иллюзией, когда они потянулись, чтобы поднять каждый из центральных дисков. Другими словами, даже несмотря на то, что на их перцепционные оценки размера целевого диска влияло присутствие окружающего кольца, максимальное отверстие для захвата между указательным и большим пальцами захватывающей руки, которое обычно достигается примерно на 70% пути через механизм был масштабирован до реального, а не видимого размера центрального диска ( d ). Выводы Аглиоти и др. . [43] были воспроизведены в ряде других исследований (см. Обзор [24]). Тем не менее, другие исследования, использующие иллюзию Эббингауза, показали, что действие и восприятие одинаково подвержены влиянию иллюзий размерного контраста (например, [44,45]), и было высказано предположение, что очевидная разница в чувствительности между перцептивными суждениями и хваткой масштабирование происходит из-за других факторов, таких как различия во внимании и / или наклоне психофизических функций, описывающих взаимосвязь между размером цели и требуемой реакцией.Тем не менее, исследования, в которых не удалось обнаружить диссоциацию, составляют меньшинство. Фактически, недавние эксперименты Stöttinger и др. . [46] показали, что даже когда требования к вниманию и психофизические наклоны уравновешены, ручные оценки размера объекта в гораздо большей степени подвержены живописной иллюзии (в их случае диагональной иллюзией), чем хватательным движениям. Но даже в этом случае большинство исследований, утверждающих, что действие избегает эффектов иллюзий изобразительного искусства (включая исследование Штеттингера и др. .[46]) продемонстрировали диссоциацию, обнаружив нулевой эффект иллюзии на хватательные движения. Другими словами, они обнаружили, что на восприятие (по определению) влияла иллюзия, но апертура пикового захвата захватывающего движения — нет. Однако подобные нулевые эффекты никогда не бывают столь убедительными, как двойная диссоциация между действием и восприятием. Как оказалось, более недавнее исследование продемонстрировало двойную диссоциацию между восприятием и действием. Ганель и др. .[47] использовали хорошо известную иллюзию Понцо, в которой воспринимаемый размер объекта зависит от его местоположения в графических подсказках глубины (, вверху). Объекты, расположенные на расходящемся конце дисплея, кажутся больше, чем объекты, расположенные на сходящемся конце. Чтобы отделить эффекты реального размера от эффектов иллюзорного размера, Ганель и его коллеги манипулировали реальными размерами двух объектов, которые были встроены в дисплей Понцо, так что объект, который воспринимался как больший, на самом деле был меньшим из пары (, вверху ).Когда участников попросили сделать перцептивное суждение о размере объектов, их перцептивные оценки отражали иллюзорный эффект Понцо. Напротив, когда они поднимали предметы, их отверстие для захвата настраивалось на их реальный размер. Короче говоря, разница в их перцептивных оценках размера для двух объектов, которая отражала очевидную разницу в размере, была противоположна разнице в их максимальной апертуре захвата, которая отражала реальную разницу в размере (, внизу слева ).Эту двойную диссоциацию между эффектами видимой и реальной разницы в размерах на восприятие и действие, соответственно, нельзя объяснить, обращаясь к различию во внимании или различию наклона [44,45]. Эксперимент с иллюзией Понцо, Ганель и др. . [47]. На верхней диаграмме показан экспериментальный дисплей. Хотя прямоугольный целевой объект, расположенный с правой стороны дисплея, воспринимается как более длинный, чем тот, который находится слева, на самом деле он короче.На графике ниже показано среднее максимальное отверстие для захвата и средние оценки восприятия участников. Производительность, когда цели были размещены на дисплее Ponzo, показаны слева, а производительность, когда цели были размещены на контрольной сетке без иллюзий, показаны справа. На апертуру захвата не повлияла иллюзия Понзо, и она была настроена на фактическую длину целевых объектов. Однако на перцепционные оценки влияла иллюзия Понзо, и они отражали воспринимаемую, а не действительную длину целевых объектов.По материалам Ganel et al . [47]. 6. Различия в обработке форм для восприятия и действияСпоры о том, ускользает ли действие от эффектов перцептивных иллюзий, далеко не разрешены (обзоры см. [23,48]). Более того, предварительное изучение этого вопроса отвлекло внимание от более фундаментального вопроса о природе вычислений, лежащих в основе зрительно-моторного контроля. Одним из примеров проблемы, которая привлекла лишь минимальное внимание исследователей, является роль формы объекта в зрительно-моторном контроле и то, как обработка формы для действия может отличаться от традиционных перцептивных представлений об обработке формы. Идея о том, что зрение рассматривает форму объекта целостным образом, была основной темой, проходящей через теоретические описания восприятия от ранней гештальт-психологии [49] до более современной когнитивной нейробиологии (например, [50,51]). Целостное кодирование объекта позволяет представить объект, который сохраняет отношения между частями объекта и другими объектами в визуальном массиве, не требуя точной информации об абсолютном размере каждого из измерений объекта.Фактически, вычисление точного размера, расстояния и ориентации каждого аспекта каждого объекта в визуальной сцене было бы дорогостоящим в вычислительном отношении. Целостная (или конфигурационная) обработка намного более эффективна для построения перцептивных представлений объектов. Однако, когда мы взаимодействуем с объектом, совершенно необходимо, чтобы визуальные процессы, управляющие действием, учитывали абсолютные метрики наиболее релевантного измерения объекта, не подвергаясь влиянию других измерений или характеристик.Другими словами, визуальная обработка, опосредующая контроль над действием, должна быть не целостной, а аналитической. Более того, как обсуждалось ранее, требуемые координаты для действия могут быть вычислены в момент, когда действие должно быть выполнено: вычисление «точно в срок». Эмпирическое подтверждение идеи о том, что визуальный контроль действий является аналитическим, а не конфигурационным, исходит из экспериментов, в которых участники оценивали ширину серии прямоугольных целевых объектов или просто тянулись и поднимали их по всей ширине [52,53 ].Хитрость заключалась в том, что на некоторых испытательных блоках длина объектов оставалась неизменной от испытания к испытанию (то есть варьировалась только ширина), тогда как в других испытаниях менялась как длина, так и ширина. Как и ожидалось, когда длина прямоугольной мишени варьировалась случайным образом от испытания к испытанию, участникам требовалось больше времени, чтобы отличить широкий прямоугольник от узкого, чем когда длина не менялась. Другими словами, в этой перцептивной задаче участники продемонстрировали свидетельства конфигурационной или целостной обработки объектов: они не могли игнорировать длину объекта, делая суждения о его ширине.Однако, в отличие от них, участники, казалось, игнорировали длину цели, когда хватали ее по ширине. Таким образом, им не требовалось больше времени, чтобы инициировать (или завершить) захватывающее движение, когда длина объекта изменялась от испытания к испытанию, чем когда его длина оставалась той же самой. Эти результаты показывают, что целостная обработка, которая характеризует перцептивную обработку, не применима к визуальному контролю умелых действий, таких как хватание. Вместо этого зрительно-моторные механизмы, лежащие в основе этого поведения, имеют дело с основными размерами объектов как с независимыми функциями. 7. Взаимодействие между двумя потокамиХотя я сосредоточился на разделении труда между дорсальным и вентральным потоками, ясно, что эти два потока должны тесно взаимодействовать в повседневной жизни. Полезной метафорой для понимания взаимодействия между брюшным и дорсальным потоками является «дистанционная помощь», концепция, пришедшая из инженерии и робототехники. В телепомощи человек-оператор использует символический код для связи с полуавтономным роботом, который фактически выполняет требуемое двигательное действие на идентифицированный целевой объект [54].Такие системы полезны для исследования далеких или негостеприимных мест, таких как поверхность Луны или вулканические кратеры. С точки зрения метафоры телепомощи, система восприятия в вентральном потоке с ее богатыми и подробными представлениями о мире будет человеком-оператором, тогда как зрительно-моторная система в спинном потоке — это полуавтономный робот. Процессы в вентральном потоке идентифицируют конкретную цель и помечают соответствующий объект в сцене, возможно, посредством процесса, подобного вниманию.После того, как конкретный целевой объект отмечен, могут быть активированы специализированные зрительно-моторные сети в спинном потоке (в сочетании с соответствующими цепями в моторной системе) для выполнения желаемого моторного действия. Таким образом, объект будет обрабатываться параллельно механизмами как вентрального, так и дорсального потоков, каждый из которых преобразует визуальную информацию в массиве для разных целей. Такая одновременная активация, конечно, предоставит нам визуальный опыт (через вентральный поток) во время выполнения умелого действия (опосредованного дорсальным потоком). Два потока взаимодействуют и другими способами. Некоторые объекты, такие как инструменты, например, требуют, чтобы мы захватили объект определенным образом, чтобы мы могли использовать его должным образом, когда он окажется в наших руках. Механизмы восприятия в вентральном потоке, которые имеют решающее значение для идентификации инструмента, по-видимому, позволяют выбрать подходящую позу руки для использования инструмента, тогда как зрительно-моторные механизмы в спинном потоке выполняют необходимые метрические вычисления в реальном мире, чтобы гарантировать, что конечное понимание хорошо сформировано и эффективно.В этом случае оба потока должны будут довольно тесно взаимодействовать, обеспечивая конечную мощность двигателя. Таким образом, хотя существует четкое разделение труда между вентральным и дорсальным потоками, эти две системы работают вместе, обеспечивая адаптивное поведение. Список литературы1. Кларк А. 2002 г. Видишь все, как кажется? Действие, разум и великая иллюзия. J. Сознательное. Stud. 9, 181–202. [Google Scholar] 2. Бриджмен Б., Кирч М., Сперлинг А. 1981 г. Разделение когнитивных и моторных аспектов зрительной функции с помощью индуцированного движения.Восприятие. Психофизика. 29, 336–342. (10.3758 / BF03207342) [PubMed] [CrossRef] [Google Scholar] 3. Гудейл М.А., Пелиссон Д., Праблан К. 1986 г. Значительные изменения в визуально управляемом достижении не зависят от зрения руки или восприятия перемещения цели. Природа 320, 748–750. (10.1038 / 320748a0) [PubMed] [CrossRef] [Google Scholar] 4. Гудейл М.А., Милнер А.Д. 1992 г. Разделяйте визуальные пути восприятия и действия. Trends Neurosci. 15, 20–25. (10.1016 / 0166-2236 (92)-8) [PubMed] [CrossRef] [Google Scholar] 5.Унгерлейдер Л.Г., Мишкин М. 1982 г. Две корковые зрительные системы. В анализе визуального поведения (редакторы Ingle DJ, Goodale MA, Mansfield RJW.), Стр. 549–586. Кембридж, Массачусетс: MIT Press. [Google Scholar] 6. Милнер А.Д., Гудейл М.А. 2006 г. Зрительный мозг в действии, 2-е изд. Оксфорд, Великобритания: Издательство Оксфордского университета. [Google Scholar] 7. Гудейл М.А., Милнер А.Д. 2013. Невидимое зрение: исследование сознательного и бессознательного видения, 2-е изд. Оксфорд, Великобритания: Издательство Оксфордского университета. [Google Scholar] 8. Goodale MA. 1996 г. Зрительно-моторные модули в головном мозге позвоночных.Жестяная банка. J. Physiol. Pharmacol. 74, 390–400. (10.1139 / y96-032) [PubMed] [CrossRef] [Google Scholar] 10. Kravitz DJ, Saleem KS, Baker CI, Ungerleider LG, Mishkin M. 2013. Вентральный зрительный путь: расширенная нейронная структура для обработки качества объекта. Trends Cogn. Sci. 17, 26–49. (10.1016 / j.tics.2012.10.011) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 11. Гудейл М.А., Милнер А.Д., Якобсон Л.С., Кэри Д.П. 1991 г. Неврологическая диссоциация между восприятием объектов и их схватыванием.Природа 349, 154–156. (10.1038 / 349154a0) [PubMed] [CrossRef] [Google Scholar] 12. Хамфри Г.К., Гудейл М.А., Якобсон Л.С., Сервос П. 1994 г. Роль поверхностной информации в распознавании объектов: исследования визуальной формы агнозных и нормальных субъектов. Восприятие 23, 1457–1481. (10.1068 / p231457) [PubMed] [CrossRef] [Google Scholar] 13. Гудейл М.А., Минан Дж. П., Бюлтхофф Х. Х., Николь Д. А., Мерфи К. Дж., Расикот К. И.. 1994 г. Отдельные нейронные пути для визуального анализа формы объекта при восприятии и схватывании.Curr. Биол. 4, 604–610. (10.1016 / S0960-9822 (00) 00132-9) [PubMed] [CrossRef] [Google Scholar] 14. Шенк Т. 2012 г. Отсутствие диссоциации между восприятием и действием у пациента DF при снятии тактильной обратной связи. J. Neurosci. 32, 2013–2017. (10.1523 / JNEUROSCI.3413-11.2012) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 15. Уитвелл Р.Л., Милнер А.Д., Кавина-Пратеси С., Бирн С.М., Гудейл М.А. 2013. Зрительный мозг DF в действии: роль тактильных сигналов. Нейропсихология. 55, 41–50. (10.1016 / j.neuropsychologia.2013.11.019) [PubMed] [CrossRef] [Google Scholar] 16. Милнер А.Д. и соавт. 1991 г. Восприятие и действие в «визуальной форме агнозии». Головной мозг 114, 405–428. (10.1093 / brain / 114.1.405) [PubMed] [CrossRef] [Google Scholar] 17. Джеймс Т.В., Калхэм Дж. К., Хамфри Г. К., Милнер А., Гудейл, Массачусетс. 2003 г. Поражения вентрально-затылочной кости ухудшают распознавание объектов, но не объектно-ориентированного захвата: исследование с помощью фМРТ. Головной мозг 126, 2463–2475. (10.1093 / brain / awg248) [PubMed] [CrossRef] [Google Scholar] 18. Бридж H, Томас О.М., Минини L, Кавина-Пратеси C, Милнер А.Д., Паркер А.Дж.2013. Структурные и функциональные изменения зрительной коры у пациента с агнозией зрительной формы. J. Neurosci. 33, 12 779–12 791. (10.1523 / JNEUROSCI.4853-12.2013) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 19. Гриль-Спектор К. 2003 г. Нейронная основа восприятия объекта. Curr. Opin. Neurobiol. 13, 159–166. (10.1016 / S0959-4388 (03) 00040-0) [PubMed] [CrossRef] [Google Scholar] 20. Балинт Р. 1909 г. Seelenlähmung des ‘Schauens’, optische Ataxie, räumliche Störung der Aufmerksamkeit.Monatsschr. Психиатр. Neurol. 25, 51–81. (10.1159 / 000210464) [CrossRef] [Google Scholar] 21. Перенин М.-Т, Вигетто А. 1988 г. Атаксия зрительного нерва: специфическое нарушение зрительно-моторных механизмов. I. Различные аспекты дефицита дотягивания до объектов. Головной мозг 111, 643–674. (10.1093 / brain / 111.3.643) [PubMed] [CrossRef] [Google Scholar] 22. Перенин М.Т., Вигетто А. 1983 г. Атаксия зрительного нерва: специфическое нарушение зрительно-моторной координации. В Пространственно ориентированном поведении (ред. Хайн А., Жаннерод М.), стр. 305–326. Нью-Йорк, штат Нью-Йорк: Спрингер.[Google Scholar] 23. Милнер А.Д., Гудейл М.А. 2008 г. Пересмотр двух зрительных систем. Нейропсихология 46, 774–785. (10.1016 / 0166-2236 (92) -8) [PubMed] [CrossRef] [Google Scholar] 24. Goodale MA.
2011 г.
Превращение видения в действие. Vis. Res.
5, 1567–1587. (10.1016 / j.visres.2010.07.027) [PubMed] [CrossRef] [Google Scholar] 25. Тайра М., Майн С., Георгопулос А.П., Мутара А., Саката Х.
1990 г.
Нейроны теменной коры обезьяны, связанные с визуальным управлением движениями рук. Exp. Brain Res.
83, 29–36.(10.1007 / BF00232190) [PubMed] [CrossRef] [Google Scholar] 26. Калхэм Дж. К., Данкерт С. Л., ДеСуза Дж. Ф. Х., Гати Дж. С., Менон Р. С., Гудейл Массачусетс.
2003 г.
Захват под визуальным контролем вызывает активацию в спинных, но не вентральных областях мозга. Exp. Brain Res.
153, 180–189. (10.1007 / s00221-003-1591-5) [PubMed] [CrossRef] [Google Scholar] 27. Cavina-Pratesi C, Goodale MA, Culham JC.
2007 г.
FMRI выявляет диссоциацию между схватыванием и восприятием размера реальных трехмерных объектов. PLoS ONE
2, e424 (10.1371 / journal.pone.0000424) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 28. Бинкофски Ф., Доле С., Поссе С., Стефан К. М., Хефтер Х., Зейтц Р. Дж., Фройнд Х. Дж.
1998 г.
Передняя интрапариетальная область человека поддерживает схватывание: комбинированное исследование поражения и функциональной активации МРТ. Неврология
50, 1253–1259. (10.1212 / WNL.50.5.1253) [PubMed] [CrossRef] [Google Scholar] 29. Кастиэльо У.
2005 г.
Неврология схватывания. Nat. Rev. Neurosci.
6, 726–736. (10.1038 / nrn1744) [PubMed] [CrossRef] [Google Scholar] 30. Калхэм Дж. К., Кавина-Пратеси К., Сингхал А.2006 г.
Роль теменной коры в зрительно-моторном контроле: что мы узнали из нейровизуализации?
Нейропсихология
44, 2668–2684. (10.1016 / j.neuropsychologia.2005.11.003) [PubMed] [CrossRef] [Google Scholar] 31. Грефкес С, Финк ГР.
2005 г.
Функциональная организация внутри теменной борозды у человека и обезьяны. J. Anat.
207, 3–17. (10.1111 / j.1469-7580.2005.00426.x) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 32. Чемпион Пьеро-Дезейлиньи, Милеа Д., Мури Р.М.
2004 г.
Контроль движения глаз корой головного мозга.Curr. Opin. Neurol.
17, 17–25. (10.1097 / 00019052-200402000-00005) [PubMed] [CrossRef] [Google Scholar] 33. Карнат Х.О., Перенин М.-Т.
2005 г.
Кортикальный контроль визуально управляемой досягаемости: данные пациентов с атаксией зрительного нерва. Цереб. Кора
15, 1561–1569. (10.1093 / cercor / bhi034) [PubMed] [CrossRef] [Google Scholar] 34. Кавина-Пратеси С., Монако С., Фаттори П., Галлетти С., МакАдам Т. Д., Куинлан Д. Д., Гудейл М. А., Калхэм Дж. С..
2010 г.
Функциональная магнитно-резонансная томография выявляет нейронные субстраты транспортировки рук и формирования захвата в действиях «дотянуться до захвата» у людей . J. Neurosci.
30, 10 306–10 323. (10.1523 / JNEUROSCI.2023-10.2010) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 35. Прадо Дж, Клаванье С, Отценбергер Х, Шайбер С, Перенин М-Т.
2005 г.
Две корковые системы для достижения центрального и периферического зрения. Нейрон
48, 849–858. (10.1016 / j.neuron.2005.10.010) [PubMed] [CrossRef] [Google Scholar] 36. Вайскранц Л.
1997 г.
Сознание потеряно и найдено: нейропсихологическое исследование. Оксфорд, Великобритания: Издательство Оксфордского университета. [Google Scholar] 37.Вайскранц Л., Уоррингтон Е.К., Сандерс, доктор медицины, Маршалл Дж.
1974 г.
Зрительная способность в гемианоптическом поле после ограниченной затылочной абляции. Головной мозг
97, 709–728. (10.1093 / brain / 97.1.709) [PubMed] [CrossRef] [Google Scholar] 38. Сандерс, доктор медицины, Уоррингтон, Э.К., Маршалл Дж., Вайскранц Л.
1974 г.
«Слепое зрение»: зрение в поле дефекта. Ланцет
20, 707–708. (10.1016 / S0140-6736 (74) 92907-9) [PubMed] [CrossRef] [Google Scholar] 39. Талер Л., Гудейл М.А.
2010 г.
Помимо расстояния и направления: мозг неметрически представляет целевые местоположения.J. Vis.
10, 1–27. (10.1167 / 10.3.3) [PubMed] [CrossRef] [Google Scholar] 40. Бриджмен Б., Льюис С., Хейт Г., Нэгл М.
1979 г.
Связь когнитивных и моторно-ориентированных систем зрительного восприятия позиции. J. Exp. Psychol. Гм. Восприятие. Выполнять.
5, 692–700. (10.1037 / 0096-1523.5.4.692) [PubMed] [CrossRef] [Google Scholar] 41. Хансен Р.М., Скавенский А.А.
1985 г.
Точность пространственной локализации во время саккадического движения глаза. Vis. Res.
25, 1077–1082. (10.1016 / 0042-6989 (85) -1) [PubMed] [CrossRef] [Google Scholar] 42.Goodale MA.
1988 г.
Модульность в зрительно-моторном управлении: от входа до выхода. В «Вычислительные процессы в человеческом зрении: междисциплинарная перспектива» (ред. Пилишин З.В.), стр. 262–285. Норвуд, Нью-Джерси: Ablex. [Google Scholar] 43. Aglioti S, DeSouza J, Goodale MA.
1995 г.
Иллюзии контрастности размера обманывают глаза, но не руку. Curr. Биол.
5, 679–685. (10.1016 / S0960-9822 (95) 00133-3) [PubMed] [CrossRef] [Google Scholar] 44. Franz VH, Gegenfurtner KR, Bülthoff HH, Fahle M.
2000 г.
Улавливание визуальных иллюзий: нет доказательств диссоциации между восприятием и действием.Psychol. Sci.
11, 20–25. (10.1111 / 1467-9280.00209) [PubMed] [CrossRef] [Google Scholar] 45. Franz VH.
2003 г.
Ручная оценка размера: нейропсихологическая мера восприятия?
Exp. Brain Res.
151, 471–477. (10.1007 / s00221-003-1477-6) [PubMed] [CrossRef] [Google Scholar] 46. Стёттингер Э., Пфустершмид Дж., Вагнер Х., Данкерт Дж., Андерсон Б., Пернер Дж.
2012 г.
Как справиться с иллюзиями: копирование Stöttinger и др. . [Exp Brain Res (2010) 202: 79–88] результаты с трехмерными объектами. Exp. Brain Res.216, 155–157. (10.1007 / s00221-011-2912-8) [PubMed] [CrossRef] [Google Scholar] 47. Ганель Т., Танцер М., Гудейл М.А.
2008 г.
Двойная диссоциация между действием и восприятием в контексте визуальных иллюзий: противоположные эффекты реального и иллюзорного размера. Psychol. Sci.
19, 221–225. (10.1111 / j.1467-9280.2008.02071.x) [PubMed] [CrossRef] [Google Scholar] 48. Смитс Дж. Б., Бреннер Э.
2006 г.
10 лет иллюзий. J. Exp. Psychol. Гм. Восприятие. Выполнять.
32, 1501–1504. (10.1037 / 0096-1523.32.6.1501) [PubMed] [CrossRef] [Google Scholar] 49.Коффка К.
1935 г.
Принципы гештальт-психологии. Нью-Йорк, штат Нью-Йорк: Harcourt, Brace and Co. [Google Scholar] 50. Дункан Дж.
1984 г.
Выборочное внимание и организация визуальной информации. J. Exp. Psychol. Gen.
113, 501–517. (10.1037 / 0096-3445.113.4.501) [PubMed] [CrossRef] [Google Scholar] 51. О’Крэвен К.М., Даунинг ЧП, Канвишер Н.
1999 г.
Свидетельство фМРТ для объектов как единиц выбора внимания. Природа
401, 584–587. (10.1038 / 44134) [PubMed] [CrossRef] [Google Scholar] 52. Ганель Т, Гудейл МА.2003 г.
Визуальный контроль действия, но не восприятия требует аналитической обработки формы объекта. Природа
426, 664–667. (10.1038 / nature02156) [PubMed] [CrossRef] [Google Scholar] 53. Ганель Т, Гудейл МА.
2014 г.
Интерференция Гарнера на основе вариабельности для перцепционных оценок, но не для понимания. Exp. Brain Res. (10.1007 / s00221-014-3867-3) [PubMed] [CrossRef] [Google Scholar] 54. Пок П.К., Баллард Д.Х.
1996 г.
Дейктическое взаимодействие человека и робота. Робот. Auton. Syst.
18, 259–269. (10.1016 / 0921-8890 (95) 00080-1) [CrossRef] [Google Scholar]. Post Categories: Разное | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
