Движения человека рисунок: Страница не найдена — КакНаучитьсяРисовать.рф
Рисуем человека в движении 1 Красота фигуры человека в движении
Тема нашего урока:«Красота фигуры человека в движении».
Нарисовать человека — очень
трудное дело. Тысячи людей
во всём мире берутся за это,
стараясь передать черты
живого человека, его тело,
позы, движения. Можно
смело сказать, что портрет
существует столько же,
сколько живёт на земле
человек. Поражает, какими
умелыми оказались эти
первые художники! Фигурки
людей в древних
изображениях были гибкие и
ловкие, сноровистые и
умелые.
• Настоящей
прародиной
современного
портрета
стала удивитель
ная страна
Египет. Дороги
многих видов
искусств ведут
нас к своим
истокам именно
сюда, к берегам
Нила.
• Египетские
художники строили
свои рисунки с
правильным
чередованием
фигур, растений,
цветов, оттенков,
отчего возникает
чувство ритма.
Египтяне создали
особый тип рисунка
или «канон» — они
человека и его
голову в профиль.

Таким образом
человек был более
выразителен.
Древние греки были
очень жизнелюбивые.
Мир, который их
окружал, учил их
подвижности. На
древнегреческой вазе
изображены фигурки
бегущих людей. Красота
по-гречески -это
спортивность,
выносливость,
физическая развитость.
Греки считали также, что
ум и сила человека
выражаются в его
спокойствии,
уравновешенности.
Поэтому герои греческих
скульптур — это люди
дружелюбные, красивые
и гармоничные.
Леонардо да Винчи,
изучавший и глубоко
анализировавший
опыт древних,
разрабатывая правила
изображения
человеческой фигуры,
пытался на основе
литературных
сведений
восстановить так
называемый «квадра
т древних». Он
выполнил рисунок, в
котором показана
пропорциональная
закономерность в
соотношении частей
тела человека.
Пропорции всякого
живого организма,
развиваясь,
изменяются.
Пропорции
маленького ребёнка
сильно отличаются от
пропорций взрослого
человека. У взрослого
размер головы
занимает примерно
1/7 или 1/8 часть
всего его роста, а у
ребёнка 4 -5 лет
занимает 1/4 или 1/5
часть. Однако у
каждого человека
свои характерные
пропорции.
Форму и движения
тела человека во
многом определяет
скелет. Он играет
роль каркаса в
строении фигуры.
Полезно, передавая в
рисунке форму
человеческого тела
намечать его каркас
даже в тех случаях,
когда он находится
внутри и его можно
только представить.
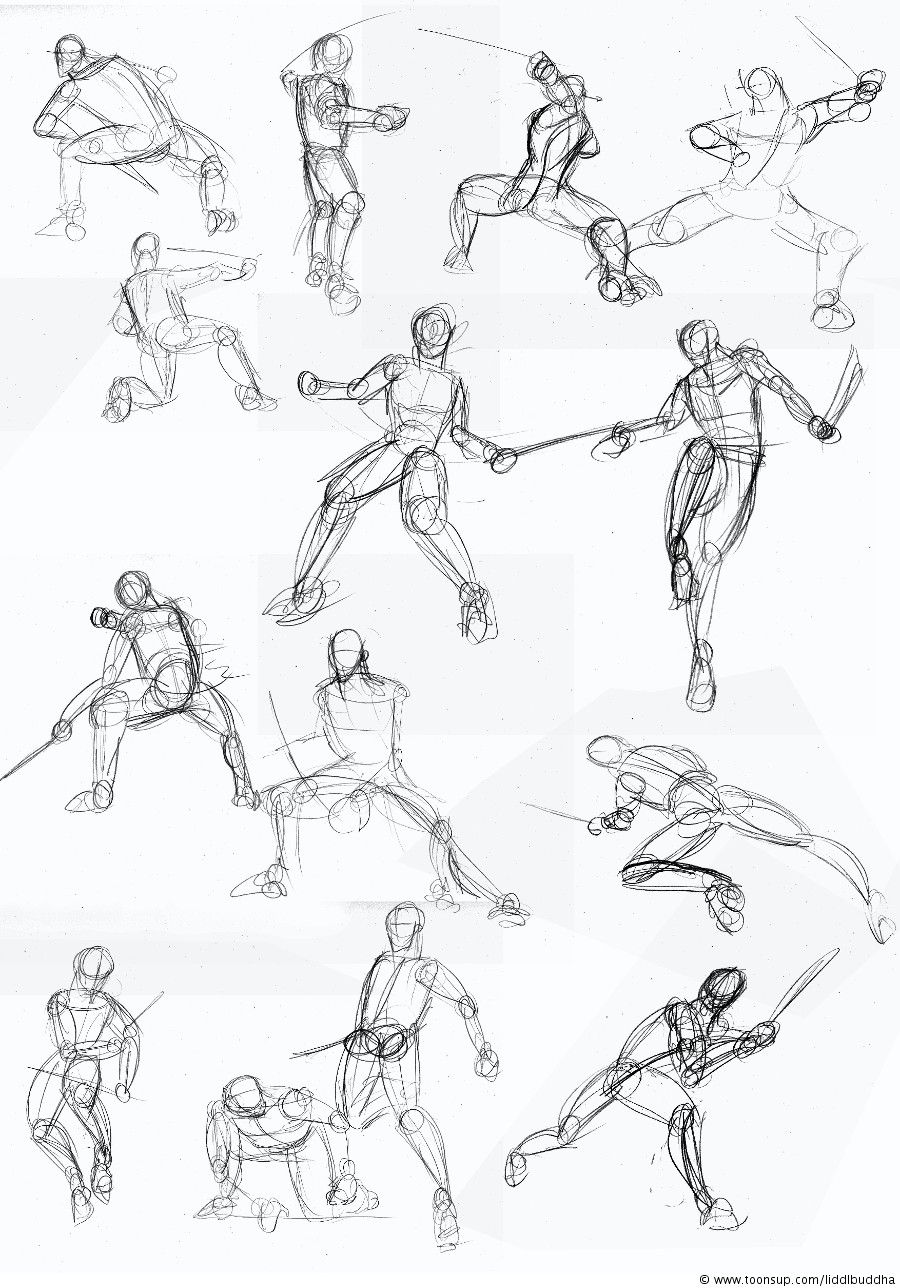
С помощью таких человечков легко передать любое
Сначала рисуем как бы проволочный скелетик, а
затем превращаем его в человека, наращивая объём.
Рисуем хоккеиста
Схематически обозначили фигуры.
Рисуем строение тела спортсменов
Творческое задание:
выполнить рисунок человека в движении для будущей
скульптуры
Создание анимации движения в Animate CC
Прежде чем приступить к анимации свойств, необходимо учесть следующее:
ActionScript не требуется. Как и для многих операций в Animate, для анимации не требуется ActionScript. Однако если необходимо, можно создать анимации с помощью ActionScript.
Как и для многих операций в Animate, для анимации не требуется ActionScript. Однако если необходимо, можно создать анимации с помощью ActionScript.
Основы временной шкалы и редактирования свойств. Перед началом работы с анимацией движения необходимо ознакомиться с основами использования временной шкалы и редактирования свойств. Основы изложены в разделе Кадры и ключевые кадры.
Редактировать ключевые кадры отдельных свойств в рабочей области можно в инспекторе свойств или в редакторе движения. Обратите внимание, что использование редактора движения является необязательным при создании многих типов простых анимаций движения.
Редактор движений не поддерживается в Animate CC.
Только экземпляры символов и текстовые поля. Animate анимирует только экземпляры символов и текстовые поля. Все остальные типы объектов заключаются в оболочку символа, когда к ним применяется анимация движения. Экземпляр символа может содержать вложенные символы, которые, в свою очередь, тоже могут быть анимированными на своих временных шкалах.
Один объект для анимации.Минимальным структурным элементом слоя анимации движения является диапазон анимации. Диапазон анимации в слое анимации может содержать только один экземпляр символа или текстовое поле. Этот экземпляр символа называется целью диапазона анимации. Тем не менее, один символ может содержать много объектов.
Изменение цели. Добавление второго символа или текстового поля в диапазон анимации движения приведет к замене исходного символа в анимации движения. Целевой объект анимации можно изменить, перетащив другой символ из библиотеки в диапазон анимации на временной шкале или выбрав Модификация > Символ > Заменить символ. Символ можно удалить из слоя анимации, не удаляя и не разделяя саму анимацию. Позже в анимацию можно будет добавить другой экземпляр символа. Также можно в любое время изменить символ или его тип.
Изменение траекторий движения.Когда анимация содержит движение, в рабочей области появляется траектория движения. Траектория движения показывает положение анимируемого объекта в каждом кадре. Можно изменить траекторию движения в рабочей области, перетаскивая его контрольные точки. Нельзя добавлять направляющую движения в слой анимации или обратной кинематики.
Траектория движения показывает положение анимируемого объекта в каждом кадре. Можно изменить траекторию движения в рабочей области, перетаскивая его контрольные точки. Нельзя добавлять направляющую движения в слой анимации или обратной кинематики.
Дополнительные сведения об анимации с использованием обратной кинематики см. в разделе Анимация каркаса.
Американские ученые научили робота делать сальто — Российская газета
Трюки, которые вытворяют роботы, не перестают удивлять. Скажем, один из самых совершенных на сегодня гуманоидных роботов Atlas, созданный компанией Boston Dynamics, запрыгивает на большую высоту, а затем соскакивает вниз.
Но самый впечатляющий номер — сальто назад. А еще этот робот бегает по пересеченной местности и способен подняться после падения. И вот новое достижение Atlas. Он демонстрирует чудеса ловкости, передвигаясь по очень сложной, извилистой поверхности, ступая по неустойчивым доскам и тонким планкам. Тут и человеку пришлось бы непросто. Робот копирует движения человека, который пытается удержать равновесие при ходьбе по таким сложным поверхностям.
Робот копирует движения человека, который пытается удержать равновесие при ходьбе по таким сложным поверхностям.
Гуманоидные роботы будут использоваться для изучения других планет и небесных тел
— Мы максимально скопировали движения человека, которые позволяют роботу взбираться на горы, пробираться по пещерам, двигаться по снегу или подниматься по лестницам, — рассказывает один из авторов разработки профессор Джерри Пратт. — Эти движения были отточены до идеала многовековым процессом эволюции, они позволяют держать в равновесии центр массы тела человека, который находится достаточно высоко.
При помощи лазерного сканнера Atlas постоянно составляет и обновляет трехмерную карту своего пути. По мере поступления новых данных он корректирует дальнейший маршрут и тщательным образом рассчитывает свой следующий шаг. После ряда усовершенствований робот Atlas сможет выступать даже в роли «аватара» живого человека, заменив его во время выполнения опасных миссий.
— Вполне возможно, что подобные двуногие гуманоидные роботы будут использоваться для исследований других планет и небесных тел, — рассказывает Джерри Пратт.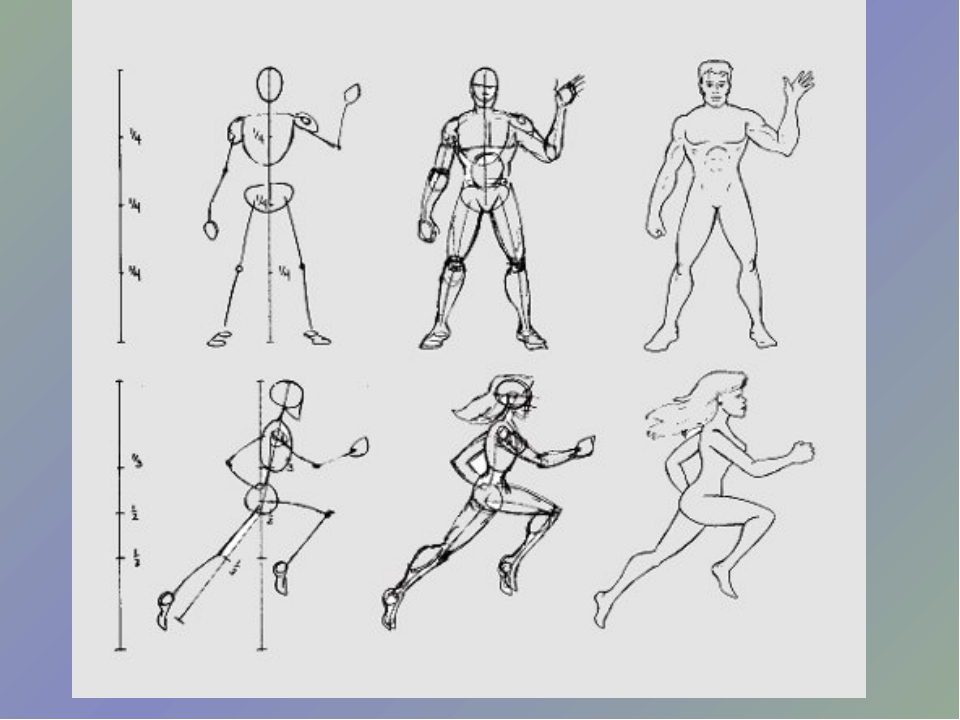 — Они смогут построить обитаемые помещения космических баз, действуя как в автоматическом режиме, так и при помощи дистанционного управления. Но в любом случае ключевым моментом во всем этом станет возможность роботов двигаться в точности так же, как и движется человек.
— Они смогут построить обитаемые помещения космических баз, действуя как в автоматическом режиме, так и при помощи дистанционного управления. Но в любом случае ключевым моментом во всем этом станет возможность роботов двигаться в точности так же, как и движется человек.
здоровых движений | Новости NIH в области здравоохранения
июль 2013 г.
Распечатать этот выпуск
Механика вашего тела
Подумайте обо всех движениях, которые вы делаете каждый день: ходьбе, подъеме по лестнице, печатании, повороте дверных ручек и поднятии тяжестей. Ваши кости, мышцы и суставы работают вместе, чтобы сделать ваше тело удивительно подвижной машиной. Как и любая машина, ваше тело может изнашиваться.Он нуждается в регулярном уходе и обслуживании, чтобы двигаться с легкостью.
Ученые изучают механические движения нашего тела, чтобы помочь нам быть максимально сильными, гибкими и подвижными на протяжении всей жизни. Этот тип исследования называется биомеханикой.
«Все системы, как в традиционной механике, так и в человеческом теле, управляются одними и теми же основными физическими законами», — говорит доктор.Джеффри Вайс, эксперт по биомеханике из Университета Юты. Движения тела включают силу, равновесие, гравитацию и движение. «Биомеханика эффективно применяет физику механики к проблемам биологии и медицины», — говорит Вайс.
К основным движущимся частям вашего тела относятся твердые кости, ткани суставов, соединяющие кости вместе, и мышцы, прикрепляющиеся к вашим костям. В вашем теле около 200 костей и более 600 мышц. Все эти части работают вместе, чтобы помочь вам двигаться в течение дня.
Исследования биомеханики, финансируемые NIH, уже привели к более эффективным способам предотвращения травм мышц и суставов у детей во время занятий спортом и игр, а также к тому, чтобы помочь пожилым людям оставаться более мобильными и независимыми.
Суставы являются частым источником проблем и болей. Некоторые суставы, например плечевой сустав, могут двигаться во многих направлениях.Но другие, например коленный сустав, могут сгибаться только в одну сторону. Любые движения вне естественного диапазона сустава могут привести к травме.
Доктор Тимоти Хьюетт, руководитель отдела исследований спортивной медицины в Университете штата Огайо, долгое время изучал часть коленного сустава, известную как ПКС (или передняя крестообразная связка, жесткая, гибкая ткань, которая соединяет кости друг с другом и скрепляет ваш скелет). . ACL соединяет бедренную кость с большеберцовой костью. Когда он растягивается или рвется, некоторые люди слышат или чувствуют «хлопок».«Спортсмены, которым необходимо делать внезапные остановки или быстро менять направление — например, в баскетболе, теннисе и футболе — подвержены риску повреждения передней крестообразной связки.
Хьюитт и другие исследователи биомеханики используют инструменты «захвата движения» для изучения того, как люди двигаются. Светоотражающие маркеры размером с монету прикрепляются к коже или одежде над суставами и мышцами людей, чтобы облегчить визуализацию их движений на экране компьютера. Затем ряд камер вокруг лаборатории может отслеживать, как люди бегают, прыгают, ходят и крутятся.Ввод этих данных в компьютеры позволяет ученым создавать трехмерные анимации движений всего тела. Это тот же тип технологии, который используется для создания анимированных персонажей в голливудских фильмах, таких как Шрек или Аватар .
«Используя инструменты биомеханики, мы можем сказать, что нормально, а что ненормально в движении, и мы можем измерить силы, действующие на тело», — говорит Хьюитт. «Мы используем биомеханику в качестве инструмента скрининга, чтобы выяснить, какие спортсмены подвержены большему риску травм и почему.
Хьюетт и его коллеги определили определенные движения, которые повышают вероятность травм ПКС у некоторых людей. Например, спортсмены, которые позволяют своим коленям сгибаться внутрь при приземлении после прыжка, подвержены риску разрывов передней крестообразной связки. После выявления людей из группы риска тренеры и физиотерапевты могут разработать упражнения, которые помогут им укрепить определенные мышцы и научиться приземляться и поворачиваться более здоровыми и безопасными способами. «Мы показали, что можем использовать эту информацию для снижения относительного риска травмы передней крестообразной связки на 60–65 %, — говорит Хьюитт.
Например, спортсмены, которые позволяют своим коленям сгибаться внутрь при приземлении после прыжка, подвержены риску разрывов передней крестообразной связки. После выявления людей из группы риска тренеры и физиотерапевты могут разработать упражнения, которые помогут им укрепить определенные мышцы и научиться приземляться и поворачиваться более здоровыми и безопасными способами. «Мы показали, что можем использовать эту информацию для снижения относительного риска травмы передней крестообразной связки на 60–65 %, — говорит Хьюитт.
Инструменты отслеживания движения также используются, чтобы узнать, как пожилые люди могут избежать травм при падении. Доктор Клайв Пай, физиотерапевт и исследователь из Иллинойского университета в Чикаго, объясняет: «Мы изучаем, как пожилые люди могут научиться изменять свои движения, чтобы адаптироваться к неожиданной среде, например, к скользкому полу».
Падения серьезны в любом возрасте, но особенно для пожилых людей, у которых больше шансов сломать кость. Каждый год более 1,6 миллиона пожилых американцев обращаются в отделения неотложной помощи с травмами, связанными с падением.«Падение причиняет много страданий и является огромной проблемой для общества», — говорит Пай.
Каждый год более 1,6 миллиона пожилых американцев обращаются в отделения неотложной помощи с травмами, связанными с падением.«Падение причиняет много страданий и является огромной проблемой для общества», — говорит Пай.
Упражнения, улучшающие равновесие и укрепляющие мышцы, могут помочь предотвратить падения. Пай и его коллеги также обнаружили, что людей можно научить избегать падений, если они будут практиковаться в ходьбе по неустойчивым, но безопасным поверхностям в лаборатории. «Люди в возрасте 65 лет и старше могут адаптироваться и замечательно запоминают, как сохранять вертикальное положение тела, когда в окружающей среде возникают возмущения, если они сталкивались с подобными ситуациями 2 или 3 раза раньше», — говорит Пай.
Биомеханика также может быть использована для лечения двигательных проблем. Вайс использует компьютерные модели, чтобы посмотреть, как нагружаются тазобедренные суставы, когда кто-то ходит или поднимается и спускается по лестнице. Он анализирует как нормальные бедра, так и те, у которых есть состояние, называемое дисплазией тазобедренного сустава. «Дисплазия тазобедренного сустава вызывает нестабильность, которая может привести к раннему развитию артрита. Отек (воспаление) в одном или нескольких суставах, что приводит к боли и потере подвижности. со временем», — говорит Вайс. В конце концов, эти компьютерные модели могут помочь врачам выбрать подходящее лечение и выяснить, каким пациентам может помочь хирургическое вмешательство.
«Дисплазия тазобедренного сустава вызывает нестабильность, которая может привести к раннему развитию артрита. Отек (воспаление) в одном или нескольких суставах, что приводит к боли и потере подвижности. со временем», — говорит Вайс. В конце концов, эти компьютерные модели могут помочь врачам выбрать подходящее лечение и выяснить, каким пациентам может помочь хирургическое вмешательство.
Людям с церебральным параличом, болезнью Паркинсона и рассеянным склерозом также может быть полезен биомеханический анализ. «Мы используем отслеживание движений, чтобы посмотреть, насколько хорошо эти пациенты ходят и что может быть не так, поэтому мы можем попытаться что-то с этим сделать», — говорит доктор Дайан Дамиано, физиотерапевт, возглавляющая исследования биомеханики в Клиническом центре Национального института здравоохранения в США. Бетесда, Мэриленд. «Мы сосредоточены на том, чтобы помогать пациентам укреплять мышцы и работать над улучшением баланса и координации.Мы также наблюдаем за активацией мозга во время движения.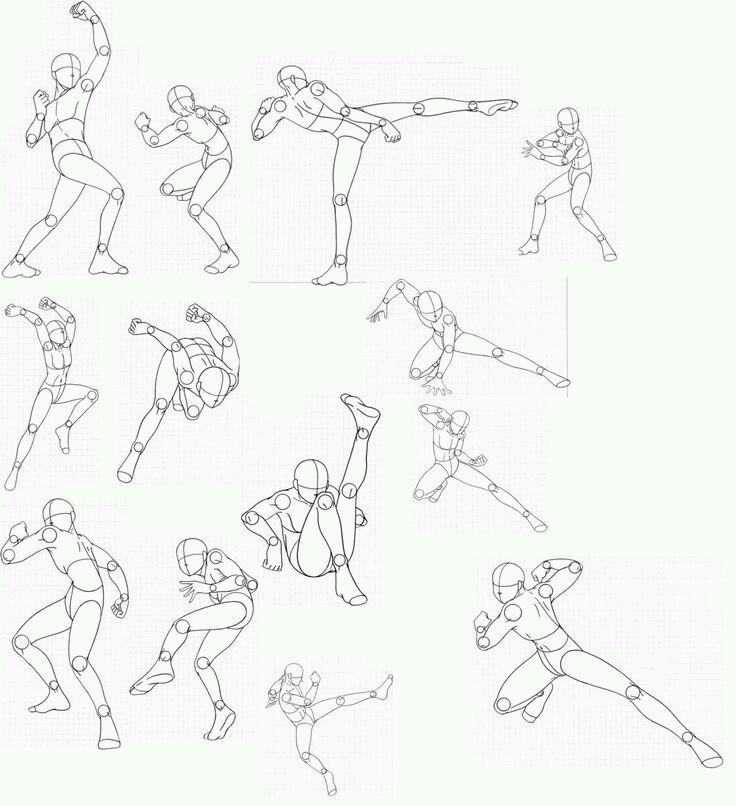 Это может дать нам представление о том, как эти движения контролируются мозгом».
Это может дать нам представление о том, как эти движения контролируются мозгом».
Укрепление мышц и правильное положение суставов важны практически для всех, кто хочет оставаться гибким и мобильным. «Суть в том, что все должны быть активными, — говорит Дамиано. «Мы хотим сделать так, чтобы все люди могли двигаться лучше, независимо от возраста и состояния здоровья».
Люди используют движения с минимальными затратами в задаче на все тело
Вулпорт Д. Настоящая причина мозгов. TEDGlobal.
Джозеф Р. Поведение мозга плода и когнитивное развитие. Дев. 20 (1), 81–98 (2000).
Артикул Google Scholar
Вивиани, П. и Флэш, Т. Минимальный рывок, степенной закон двух третей и изохрония: сходящиеся подходы к планированию движения. Дж. Экспл. Психол. 21 (1), 32 (1995).
КАС Google Scholar
Саммерсайд, Э. М., Шадмер, Р. и Ахмед, А. А. Энергичность движений: вознаграждение снижает стоимость усилий. J. Нейрофизиол. 119 (6), 2347–2357 (2018).
ПабМед ПабМед Центральный Статья Google Scholar
Вольперт, Д. М. Вычислительные подходы к управлению двигателем. Тенденции Cogn. науч. 1 (6), 209–216 (1997).
ПабМед Статья КАС Google Scholar
Тодоров Э. Принципы оптимальности в сенсомоторном управлении. Нац. Неврологи. 7 (9), 907–915 (2004).
ПабМед ПабМед Центральный Статья КАС Google Scholar
Беррет, Б., Делис, И., Гаво, Дж. и Джин, Ф. Оптимальность и модульность движений человека: от оптимального контроля до мышечной синергии. В Biomechanics of Anthropomorphic Systems 105–133 (Springer, New York, 2019).
Глава Google Scholar
Flash, T. & Henis, E. Модификации траектории руки при достижении визуальных целей. Дж. Когн. Неврологи. 3 (3), 220–230 (1991).
ПабМед Статья КАС Google Scholar
Флэш Т. и Хоган Н. Координация движений рук: экспериментально подтвержденная математическая модель. J. Neurosci. 5 (7), 1688–1703 (1985).
ПабМед ПабМед Центральный Статья КАС Google Scholar
Zarrugh, M. & Radcliffe, C. Прогнозирование метаболических затрат при ровной ходьбе. евро. Дж. Заявл. Физиол. Занять. Физиол. 38 (3), 215–223 (1978).
ПабМед Статья КАС Google Scholar
Бонгерс, Р. М., Заал, Ф. Т. и Жаннерод, М. Образцы открывания рук при схватывании.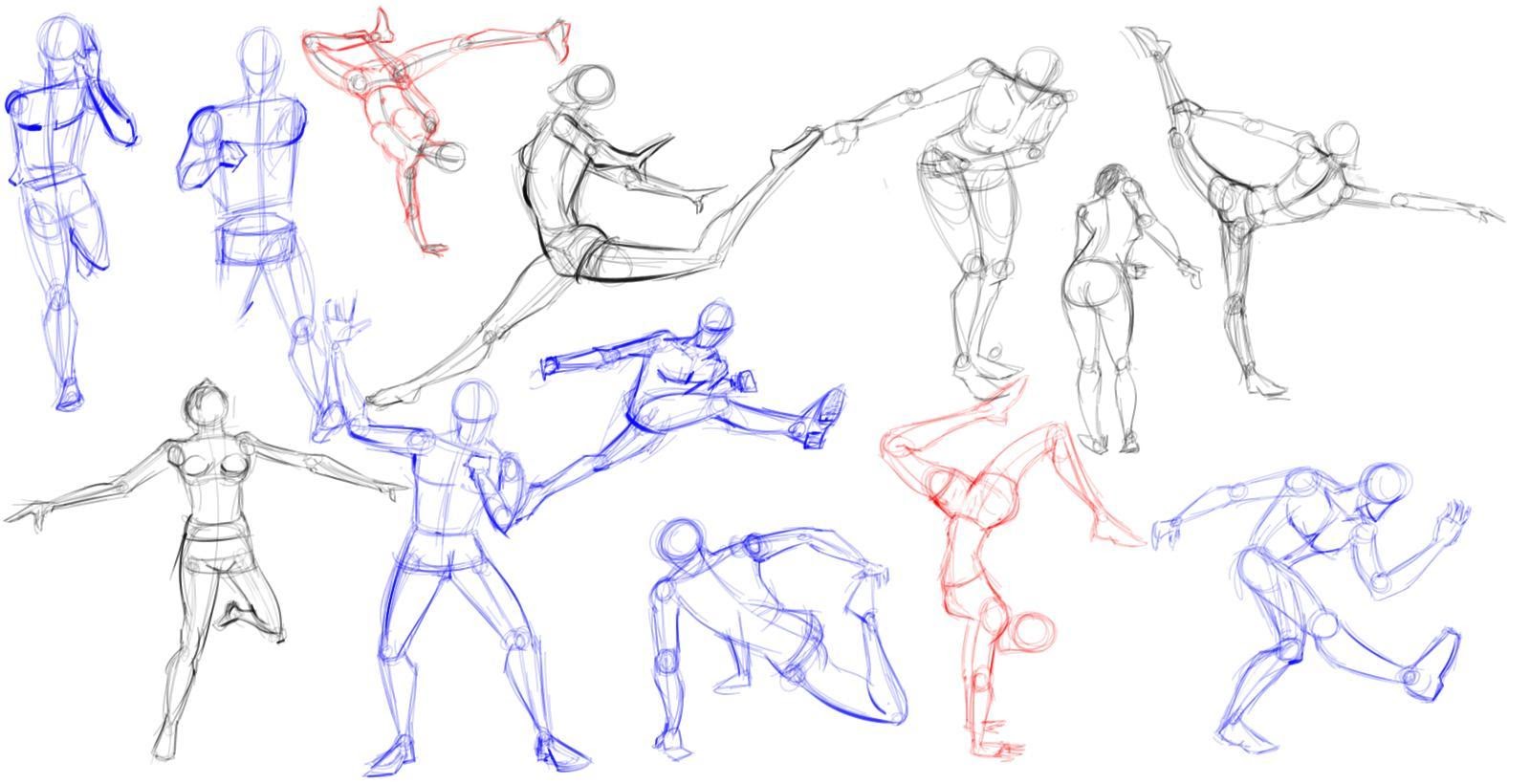 Гул. Мов. науч. 31 (3), 487–501 (2012).
Гул. Мов. науч. 31 (3), 487–501 (2012).
ПабМед Статья Google Scholar
Смитс, Дж. Б., Мартин, Дж. и Бреннер, Э. Сходство между движениями пальцев при хватании, прикосновении и нажатии. Экспл. Мозг Res. 203 (2), 339–346 (2010).
ПабМед ПабМед Центральный Статья Google Scholar
Селинджер, Дж. К., О’Коннор, С. М., Вонг, Дж. Д. и Донелан, Дж. М. Люди могут постоянно оптимизировать энергетические затраты во время ходьбы. Курс. биол. 25 (18), 2452–2456 (2015).
ПабМед Статья КАС Google Scholar
Санчес, Н., Парк, С. и Финли, Дж. М. Доказательства энергетической оптимизации во время адаптации различаются для метаболических, механических и перцептивных оценок энергетических затрат. науч. 7 (1), 1–14 (2017).
Артикул КАС Google Scholar
Вонг, Дж. Д., Селинджер, Дж. К. и Донелан, Дж. М. Достаточно ли естественной изменчивости походки, чтобы инициировать спонтанную оптимизацию энергии при ходьбе человека? J. Нейрофизиол. 121 (5), 1848–1855 (2019).
ПабМед ПабМед Центральный Статья Google Scholar
Ralston, HJ. Соотношение энергии и скорости и оптимальная скорость при ходьбе по ровной поверхности. Междунар. З. Энгью. Физиол. 17 (4), 277–283 (1958).
ПабМед КАС Google Scholar
Cotes, J. & Meade, F. Расход энергии и потребность в механической энергии при ходьбе. Эргономика 3 (2), 97–119 (1960).
Артикул Google Scholar
Zarrugh, M., Todd, F. & Ralston, H. Оптимизация расхода энергии при ходьбе по ровной поверхности. евро. Дж. Заявл. Физиол. Занять. Физиол. 33 (4), 293–306 (1974).
Оптимизация расхода энергии при ходьбе по ровной поверхности. евро. Дж. Заявл. Физиол. Занять. Физиол. 33 (4), 293–306 (1974).
ПабМед Статья КАС Google Scholar
Cavanagh, P. R. & Williams, K. R. Влияние изменения длины шага на поглощение кислорода во время бега на длинные дистанции. Мед. науч. Спортивное упражнение. 14 (1), 30 (1982).
ПабМед Статья КАС Google Scholar
Холт, К.Г., Хэмилл, Дж. и Андрес, Р.О. Прогнозирование минимальных затрат энергии при ходьбе человека. Мед. науч. Спортивное упражнение. 23 (4), 491–498 (1991).
ПабМед Статья КАС Google Scholar
Минетти, А. Э., Капелли, К., Дзампаро, П., ди Прамперо, П. Э. и Сайбене, Ф.Влияние частоты шагов на механическую мощность и расход энергии при ходьбе. Мед. науч. Спортивное упражнение. 27 (8), 1194–1202 (1995).
Мед. науч. Спортивное упражнение. 27 (8), 1194–1202 (1995).
ПабМед Статья КАС Google Scholar
Донелан, Дж. М., Крам, Р. и Куо, А. Д. Механическая работа для пошаговых переходов является основным фактором, определяющим метаболические затраты человека при ходьбе. Дж. Экспл. биол. 205 (23), 3717–3727 (2002).
ПабМед Статья Google Scholar
Умбергер, Б. Р. и Мартин, П. Е. Механическая мощность и эффективность ровной ходьбы с разной частотой шагов. Дж. Экспл. биол. 210 (18), 3255–3265 (2007).
ПабМед Статья Google Scholar
Максвелл Донелан, Дж., Крам, Р. и Артур, Д. К. Механические и метаболические детерминанты предпочтительной ширины шага при ходьбе человека. Проц. Р. Соц. Лонд. B 268 (1480), 1985–1992 (2001).
Артикул Google Scholar
Arellano, C.J. & Kram, R. Влияние ширины шага и размаха рук на энергетические затраты и боковой баланс во время бега. Дж. Биомех. 44 (7), 1291–1295 (2011).
ПабМед Статья Google Scholar
Лю Л., Джонсон, Л., Зоар, О. и Баллард, Д. Х. Люди Используйте аналогичные последовательности поз в задаче отслеживания всего тела. Iscience 19 , 860–871 (2019).
ОБЪЯВЛЕНИЕ пабмед ПабМед Центральный Статья Google Scholar
Берштейн, Н. А. Координация и регулирование движений (Pergamon Press, 1966).
Лю Л., Купер Дж. Л. и Баллард Д. Х. Вычислительное моделирование: динамическая модель человека. Frontiers in Neurorobotics 15 , 126 (2021).
Margaria, R. Биомеханика и энергетика мышечных упражнений (Oxford University Press, 1976).
Биомеханика и энергетика мышечных упражнений (Oxford University Press, 1976).
Hoyt, D.F. & Taylor, C.R. Походка и энергетика передвижения у лошадей. Природа 292 (5820), 239–240 (1981).
ОБЪЯВЛЕНИЕ Статья Google Scholar
Хуанг, Х.Дж., Крам Р. и Ахмед А.А. Снижение метаболических затрат во время двигательного обучения динамике достижения рук. J. Neurosci. 32 (6), 2182–2190 (2012).
ПабМед ПабМед Центральный Статья КАС Google Scholar
Ли, Т. Т. Планирование траектории и управление трехзвенным двуногим роботом. В Трудах . 1988 г. Международная конференция IEEE по робототехнике и автоматизации 820–823 (IEEE, 1988 г.).
Челиковски, С. и Андерле, М. Стабильные походки для трехзвенного плоского двуногого робота с двумя исполнительными механизмами на основе совмещенных виртуальных голономных ограничений и циклической неактивируемой переменной. IFAC-PapersOnLine 51 (22), 378–385 (2018).
IFAC-PapersOnLine 51 (22), 378–385 (2018).
Артикул Google Scholar
Mu, X. & Wu, Q. Синтез полного цикла сагиттальной походки пятизвенного двуногого робота. Robotica 21 (5), 581–587 (2003).
Артикул Google Scholar
Mu, X., Wu, Q. Синтез сагиттальной походки пятизвенного двуногого робота. В Proceedings of the American Control Conference 2004 , 4004–4009 (IEEE, 2004).
Mu, X. Динамика и регуляция движения пятизвенного двуногого робота, идущего в сагиттальной плоскости. (2005).
Крищенко А., Ткачев С., Фетисов Д. Планарное управление ходьбой пятизвенного двуногого робота. Вычисл. Мат. Модель. 18 (2), 176–191 (2007).
MathSciNet МАТЕМАТИКА Статья Google Scholar
Мусави, П. Н. и Багери, А. Математическое моделирование семизвенного двуногого робота на различных поверхностях и рассмотрение ZMP. Заяв. Мат. Модель. 31 (1), 18–37 (2007).
Н. и Багери, А. Математическое моделирование семизвенного двуногого робота на различных поверхностях и рассмотрение ZMP. Заяв. Мат. Модель. 31 (1), 18–37 (2007).
МАТЕМАТИКА Статья Google Scholar
Байрами, X. и Муртури, И. Кинематическая модель семизвенного двуногого робота. IJMET 8 (2), 454–462 (2017).
Google Scholar
Гриззл, Дж. В., Шевальро, К., Эймс, А. Д. и Синнет, Р. В. Трехмерная двуногая роботизированная ходьба: модели, управление с обратной связью и открытые проблемы. МФБ Proc. 43 (14), 505–532 (2010).
МАТЕМАТИКА Статья Google Scholar
Хусаинов Р., Шимчик И., Афанасьев И. и Магид Э. Трехмерное моделирование движения двуногого робота с использованием шагающих примитивов в среде Simulink. На 12-й международной конференции «Информатика в управлении, автоматизации и робототехнике», ICINCO 2015, Кольмар, Франция, 21–23 июля 2015 г. Отредактированные избранные статьи. 287–304. (Спрингер, 2016).
Отредактированные избранные статьи. 287–304. (Спрингер, 2016).
Delp, S. L. et al. OpenSim: программное обеспечение с открытым исходным кодом для создания и анализа динамических симуляций движения. IEEE Trans. Биомед. англ. 54 (11), 1940–1950 (2007).
ПабМед Статья Google Scholar
Dembia, C.L., Bianco, N.A., Falisse, A., Hicks, J.L. & Delp, S.L. OpenSim Moco: Оптимальный контроль опорно-двигательного аппарата. PLOS Вычисл. биол. 16 (12), e1008493 (2020).
ОБЪЯВЛЕНИЕ пабмед ПабМед Центральный Статья КАС Google Scholar
Сет, А., Шерман, М., Рейнболт, Дж. А. и Делп, С. Л. OpenSim: скелетно-мышечная система моделирования и моделирования для исследований и обмена данными in silico. Процедура Ютам. 2 , 212–232 (2011).
ПабМед ПабМед Центральный Статья Google Scholar

Тодоров Э., Эрез Т. и Тасса Ю. Муджоко: Физический движок для управления на основе моделей. В 2012 г. Международная конференция IEEE/RSJ по интеллектуальным роботам и системам 5026–5033 (IEEE, 2012 г.).
«Физический движок пули». https://pybullet.org/.
«Физический движок Havok». https://www.havok.com/.
«Открыть динамический движок». http://www.ode.org/.
«Физический движок PhysX». https://developer.nvidia.com/gameworks-physx-обзор.
Эрез Т., Тасса Ю. и Тодоров Э. Инструменты моделирования робототехники на основе моделей: сравнение пули, хавок, муджоко, ода и физкс.На международной конференции IEEE по робототехнике и автоматизации (ICRA) 4397–4404 (IEEE, 2015).
Джонсон, Л. и Баллард, Д. Х. Эффективные коды для обратной динамики во время ходьбы. Двадцать восьмая конференция AAAI по искусственному интеллекту . (Ситисир, 2014).
Купер, Дж. Л. и Баллард, Д. Отслеживание маркеров в реальном времени, основанное на физике. В Международная конференция по движению в играх 350–361. (Спрингер, 2012).
Купер, Дж. Л. Анализ и синтез движений двуногих гуманоидов: подход физического моделирования (Springer, 2013).
Burdett, R.G., Skrinar, G.S. & Simon, S.R. Сравнение механической работы и потребления метаболической энергии при нормальной походке. Дж. Ортоп. Рез. 1 (1), 63–72 (1983).
ПабМед Статья КАС Google Scholar
Хоган, Н.Механика многосуставной позы и управления движением. Биол. киберн. 52 (5), 315–331 (1985).
ПабМед МАТЕМАТИКА Статья КАС Google Scholar
Нельсон В.Л. Физические принципы экономии квалифицированных движений. Биол. киберн. 46 (2), 135–147 (1983).
ПабМед МАТЕМАТИКА Статья КАС Google Scholar
Шадмер, Р. и Ахмед, А.А. Энергия: нейроэкономика управления движением (MIT Press, 2020).
Seifert, L. et al. Навыки лазания и сложность конструкции стены для скалолазания: оценка рывка как нового показателя беглости выполнения. J. Appl. Биомех. 30 (5), 619–625 (2014).
ПабМед Статья Google Scholar
Людвиг Д. и Перро Э.J. Соответствующая задаче адаптация скелетно-мышечного импеданса во время позы и движения. В IEEE American Control Conference 4784–4789 (2014).
Грациано, М.С., Тейлор, К.С. и Мур, Т. Сложные движения, вызванные микростимуляцией прецентральной коры. Нейрон 34 (5), 841–851 (2002).
ПабМед Статья КАС Google Scholar

Черчленд, М.М., Каннингем Дж. П., Кауфман М. Т., Рю С. И. и Шеной К. В. Подготовительная активность коры головного мозга: представление движения или первый винтик в динамической машине? Нейрон 68 (3), 387–400 (2010).
ПабМед ПабМед Центральный Статья КАС Google Scholar
Георгопулос, А. П., Шварц, А. Б. и Кеттнер, Р. Э. Нейронная популяция, кодирующая направление движения. Наука 233 (4771), 1416–1419 (1986).
ОБЪЯВЛЕНИЕ пабмед Статья КАС Google Scholar
Олсхаузен, Б. А. и Филд, Д. Дж. Появление свойств рецептивного поля простых клеток путем изучения разреженного кода для естественных изображений. Природа 381 (6583), 607–609 (1996).
ОБЪЯВЛЕНИЕ пабмед Статья КАС Google Scholar
Ольсхаузен, Б. А. и Филд, Д.J. Разреженное кодирование с переполным базисным набором: стратегия, используемая V1?. Виз. Рез. 37 (23), 3311–3325 (1997).
А. и Филд, Д.J. Разреженное кодирование с переполным базисным набором: стратегия, используемая V1?. Виз. Рез. 37 (23), 3311–3325 (1997).
ПабМед Статья КАС Google Scholar
Вольперт, Д. М., Гахрамани, З. и Джордан, М. И. Планируются ли траектории рук в кинематических или динамических координатах? Адаптационное исследование. Экспл. Мозг Res. 103 (3), 460–470 (1995).
ПабМед Статья КАС Google Scholar
Десаи, П. Р., Десаи, П. Н., Аджмера, К. Д. и Мехта, К. Обзорный документ о Oculus Rift — гарнитуре виртуальной реальности. Препринт arXiv arXiv: 14081173. (2014).
PhaseSpace, I. PhaseSpace Захват движения. https://www.phasespace.com/ (1994).
WorldViz. Vizard 3 [Компьютерное программное обеспечение] (версия 3). (УорлдВиз, 2010).
Смит Р. и др. . Двигатель с открытой динамикой. (2005).
и др. . Двигатель с открытой динамикой. (2005).
Faber, H., Van Soest, A.J. & Kistemaker, DA. Обратная динамика механических многотельных систем: улучшенный алгоритм, который обеспечивает согласованность между кинематикой и внешними силами. ПЛОС ОДИН. 13 (9), e0204575 (2018).
ПабМед ПабМед Центральный Статья КАС Google Scholar
Границы | Компьютерное моделирование: динамическая модель человека
1. Введение
Сложность человеческого движения впервые была ярко запечатлена с помощью высокоскоростных фотографий Мейбриджа (Muybridge, 1887; Andriacchi and Alexander, 2000; Wolpert and Landy, 2012), которые породили несколько различных методов анализа в разных дисциплинах.В визуализации сначала использовались методы ключевых кадров, но позже сложные модели использовались в расширенном рендеринге для компьютерной графики (например, Zordan and Hodgins, 2002). Ранние когнитивные анализы человеческого поведения (Badler et al., 1993) были сосредоточены на человеческом движении при решении задач с использованием в основном логического подхода. В робототехнике понимание было получено путем непосредственного создания физических систем (Ijspeert et al., 2007), которые пересекают границу между людьми и робототехникой и проливают свет на человеческий дизайн.Однако эти усилия носят характерно специализированный характер. В рамках другой разработки были внедрены методы машинного обучения для использования при анализе движений животных (Schulman et al., 2016).
Ранние когнитивные анализы человеческого поведения (Badler et al., 1993) были сосредоточены на человеческом движении при решении задач с использованием в основном логического подхода. В робототехнике понимание было получено путем непосредственного создания физических систем (Ijspeert et al., 2007), которые пересекают границу между людьми и робототехникой и проливают свет на человеческий дизайн.Однако эти усилия носят характерно специализированный характер. В рамках другой разработки были внедрены методы машинного обучения для использования при анализе движений животных (Schulman et al., 2016).
На нейронном уровне для управления движением мозга используется множество специализированных подсистем. Во-первых, это обширная корковая память о планах движения. Другие — это секвенирование через базальные ганглии и посредничество ввода и вывода через таламус. Детали того, как они координируются (Callahan et al., 2013) постоянно прорабатываются, но остается много открытых проблем (Loeb, Tsianos, 2015). Учитывая эту неполноту, исследовательский выбор может заключаться в поиске описаний на более абстрактных уровнях.
Учитывая эту неполноту, исследовательский выбор может заключаться в поиске описаний на более абстрактных уровнях.
Поскольку движения должны учитывать динамику костно-мышечной системы, один из подходов состоит в том, чтобы принять эти системы как должное и начать с измерения движения и работать в обратном направлении. Однако моделирование всей сложности скелетно-мышечной системы человека может быть сложной задачей, поскольку более 300 степеней свободы и 650 мышц контролируют сложную взаимосвязанную скелетную систему.Тем не менее, существует множество подходов к моделированию с акцентом на динамику, которые можно вводить приблизительно в хронологическом порядке.
Прямой подход — построить динамическую модель гуманоида. Этот метод является ценным способом имитации движений человека и широко используется в биомедицинской инженерии из-за его соответствия физическим правилам реального мира. Однако не без ограничений: (1) слишком сложно моделировать и контролировать сложную систему, такую как все человеческое тело. (2) сложно представить «кинематические петли», такие как позы с обеими ногами на земле.(3) для больших систем уравнения движения во вложенных вращающихся системах отсчета становятся очень сложными, что требует хорошей аппроксимации. В результате из-за сложности метода прямого моделирования больших сложных систем значительная часть исследований выбирает упрощение двумерных моделей, ограничивающих движения тела сагиттальной плоскостью.
(2) сложно представить «кинематические петли», такие как позы с обеими ногами на земле.(3) для больших систем уравнения движения во вложенных вращающихся системах отсчета становятся очень сложными, что требует хорошей аппроксимации. В результате из-за сложности метода прямого моделирования больших сложных систем значительная часть исследований выбирает упрощение двумерных моделей, ограничивающих движения тела сагиттальной плоскостью.
Например, в некоторых исследованиях создается двухмерный динамический двуногий робот путем моделирования всего тела с помощью скелета из жестких сегментов, соединенных суставами.Однако упрощения этого метода для человеческих тел ограничивают исследования простыми движениями человека с одним поведением. Самый простой двуногий робот использует три звена для представления туловища и двух ног в сагиттальной плоскости (Lee, 1988; Čelikovsku and Anderle, 2018). Тем не менее, есть некоторые расширения. Двуногие роботы с пятью звеньями используют два звена для представления каждой ноги (Му и Ву, 2003, 2004; Крищенко и др. , 2007), а двуногие роботы с семью звеньями еще больше удлиняют ее, добавляя ноги (Мусави и Багери, 2007; Байрами и др.). Муртури, 2017).Кроме того, эти методы также делают много предположений при изучении передвижения. Например, большинство исследователей предполагают, что мгновенный обмен двуногой опорой происходит, когда маховая нога касается земли. Таким образом, как роботы-манипуляторы, опору двуногой стопы можно рассматривать как последовательную разомкнутую петлю кинематической цепи от точки опоры до свободных концов. Недавно были внесены некоторые усовершенствования трехмерных моделей двумерных моделей двуногих роботов (Grizzle et al., 2010; Khusainov et al., 2016; Байи и др., 2021). Однако они все же не сложны по сравнению с настоящим человеческим телом.
, 2007), а двуногие роботы с семью звеньями еще больше удлиняют ее, добавляя ноги (Мусави и Багери, 2007; Байрами и др.). Муртури, 2017).Кроме того, эти методы также делают много предположений при изучении передвижения. Например, большинство исследователей предполагают, что мгновенный обмен двуногой опорой происходит, когда маховая нога касается земли. Таким образом, как роботы-манипуляторы, опору двуногой стопы можно рассматривать как последовательную разомкнутую петлю кинематической цепи от точки опоры до свободных концов. Недавно были внесены некоторые усовершенствования трехмерных моделей двумерных моделей двуногих роботов (Grizzle et al., 2010; Khusainov et al., 2016; Байи и др., 2021). Однако они все же не сложны по сравнению с настоящим человеческим телом.
Основным способом преодоления недостатков этих простых моделей является включение более подробных моделей опорно-двигательного аппарата (Durandau et al., 2017; Lee et al., 2019). Среди них наиболее совершенным и совершенным является OpenSim (Delp et al. , 2007; Seth et al., 2011; Rajagopal et al., 2016; Dembia et al., 2020), который позволяет моделировать большие системы, включая детали до уровень прикрепленных мышц.OpenSim — это значительный шаг вперед, поскольку он обеспечивает уровень моделирования, включающий мышечные сокращения, необходимые для формирования динамики движения. Однако этот уровень лучше всего подходит для подгонки данных о сокращении. Может быть сложно решить требуемые мышечные совместные сокращения из кинематического плана движения, потому что эти уравнения нелинейны и обычно недостаточно ограничены.
, 2007; Seth et al., 2011; Rajagopal et al., 2016; Dembia et al., 2020), который позволяет моделировать большие системы, включая детали до уровень прикрепленных мышц.OpenSim — это значительный шаг вперед, поскольку он обеспечивает уровень моделирования, включающий мышечные сокращения, необходимые для формирования динамики движения. Однако этот уровень лучше всего подходит для подгонки данных о сокращении. Может быть сложно решить требуемые мышечные совместные сокращения из кинематического плана движения, потому что эти уравнения нелинейны и обычно недостаточно ограничены.
Чтобы избежать этой сложности, многие исследования, которым нужна такая генерирующая способность, предпочитают избегать мышечных компонентов и сосредотачиваются на более простых динамических моделях на уровне инерции и крутящих моментов в суставах, а также моделируют абстрактные версии человеческой системы, которые все еще используют несколько степеней свободы, но резюмируют подробные динамика через совместные крутящие моменты. Например, совместное сокращение может использовать простую модель Хилла (Blümel et al., 2012). Эти альтернативные методы расчета динамики таких многосочлененных систем также претерпели значительные улучшения (таким образом можно использовать и OpenSim). Прежде всего, это использование кинематического плана для непосредственной интеграции динамических уравнений. Для этой цели было разработано несколько динамических библиотек, таких как MuJoCo, Bullet, Havok, Open Dynamic Engine (ODE) и PhysX. Оценка этих динамических библиотек Erez et al.(2015) обнаружили, что их возможности примерно сопоставимы. Однако основное внимание в этих системах уделяется физическому движку с расчетом на то, что пользователи будут программировать свои собственные приложения.
Например, совместное сокращение может использовать простую модель Хилла (Blümel et al., 2012). Эти альтернативные методы расчета динамики таких многосочлененных систем также претерпели значительные улучшения (таким образом можно использовать и OpenSim). Прежде всего, это использование кинематического плана для непосредственной интеграции динамических уравнений. Для этой цели было разработано несколько динамических библиотек, таких как MuJoCo, Bullet, Havok, Open Dynamic Engine (ODE) и PhysX. Оценка этих динамических библиотек Erez et al.(2015) обнаружили, что их возможности примерно сопоставимы. Однако основное внимание в этих системах уделяется физическому движку с расчетом на то, что пользователи будут программировать свои собственные приложения.
В отличие от предыдущих исследований, наша система динамической модели человека (HDM) представляет собой полную и легкодоступную модель. Он построен на основе физического движка ODE, наиболее часто используемой динамической библиотеки в области робототехники. Наш HDM с 48 степенями свободы фокусируется на моделировании индивидуальных движений человека и применяет метод прямой интеграции динамики (Cooper and Ballard, 2012; Johnson and Ballard, 2014) для извлечения крутящих моментов из данных о движении с использованием нового формализма унифицированных пружинных ограничений.
Наш HDM с 48 степенями свободы фокусируется на моделировании индивидуальных движений человека и применяет метод прямой интеграции динамики (Cooper and Ballard, 2012; Johnson and Ballard, 2014) для извлечения крутящих моментов из данных о движении с использованием нового формализма унифицированных пружинных ограничений.
Одним из преимуществ системы HDM является возмещение затрат на моделирование. В каждом кадре мгновенная мощность вычисляется из чистого крутящего момента в суставе и угловой скорости в суставе. Работа, выполняемая в каждом соединении, определяется путем численного интегрирования мгновенных мощностей по всей задаче трассировки. Таким образом, имея данные захвата движения, мы можем вычислить механическую стоимость, не создавая человекоподобного двуногого робота с уравнениями движения. Обратите внимание, что для обозначения затрат вместо метаболического потребления энергии обычно используют механические показатели работы (Burdett et al., 1983). «Энергетическая стоимость», упомянутая в следующих разделах, означает механическую стоимость.
Основное внимание в статье уделяется описанию симулятора HDM как практического лабораторного инструмента и подробным демонстрациям, иллюстрирующим возможности модели. Статья организована следующим образом: во-первых, раздел методов начинается с введения в топологию модели, а затем подробно рассматривается использование маркеров движения для захвата совместных крутящих моментов модели, что позволяет оценить энергетические затраты.Далее в разделе результатов описываются несколько тестов, проведенных для измерения производительности системы HDM. После этого в разделе обсуждения освещаются особенности и проблемы HDM и указывается одно из потенциальных применений модели, которое заключается в ее использовании для сбора больших объемов проанализированных данных о движении. Наконец, Дополнительный материал включает два приложения, которые представляют собой базовую низкоуровневую реализацию модели, то есть этапы интегрирования уравнений динамики.
2. Методы — разработка модели и работа
В этом разделе представлено всестороннее описание построения динамической модели человека на высоком уровне. Низкоуровневые детали построения HDM и вывод математики, лежащей в основе физического моделирования, представлены отдельно в Приложении.
Низкоуровневые детали построения HDM и вывод математики, лежащей в основе физического моделирования, представлены отдельно в Приложении.
2.1. Детали конструкции кузова
В наших методах используется смоделированная модель человека, движения которого анализируются. Первым делом нужно построить физическую модель, способную отображать человеческие движения, точность которых влияет на результат анализа.На рис. 1 показаны сегменты тела и топология модели. Модель гуманоида представляет собой набор твердых тел, соединенных суставами. Каждый шарнир соединяет два твердых тела с опорными точками (центрами вращения), определенными в системе отсчета обоих тел. Размеры тела (длина костей) модели персонажа определялись на основе данных захвата движения.
Рисунок 1 . Модель с 48 степенями свободы. (A) Скелет модели персонажа: 21 сегмент тела, соединенных 20 суставами. (B) Обзор соединений, используемых в модели. в., хиральный: каждого из этих суставов по два (левый и правый). Четыре шаровидных сустава соединяют пять сегментов тела вдоль позвоночника от головы до талии. Шаровидные суставы также используются на ключице, плече и бедре. Универсальные шарниры используются на локтях, запястьях, коленях и лодыжках. Шарнирные суставы соединяют пальцы ног с пятками. Все суставы ограничивают диапазон движений углами, приемлемыми для движений человека. Наша модель предполагает, что суставные DOF суммируют эффекты составных мышц.
в., хиральный: каждого из этих суставов по два (левый и правый). Четыре шаровидных сустава соединяют пять сегментов тела вдоль позвоночника от головы до талии. Шаровидные суставы также используются на ключице, плече и бедре. Универсальные шарниры используются на локтях, запястьях, коленях и лодыжках. Шарнирные суставы соединяют пальцы ног с пятками. Все суставы ограничивают диапазон движений углами, приемлемыми для движений человека. Наша модель предполагает, что суставные DOF суммируют эффекты составных мышц.
2.2. Подгонка данных
Техника подгонки модели человека к данным захвата движения начинается с модели персонажа, которая служит шаблоном. На рис. 1 показано количество сегментов тела и топология модели. Далее мы назначаем все помеченные маркеры, используемые в захвате движения, определенным сегментам модели. Их легко получить, используя такие методы, как в Kirk et al. (2005) и De Aguiar et al. (2006). Однако ручное назначение маркеров также не представляет сложности, поскольку костюм для захвата движения обычно размещает маркеры на одних и тех же сегментах тела (рис. 2), даже если они находятся в несколько разных местах или сегменты тела имеют разные размеры.
2), даже если они находятся в несколько разных местах или сегменты тела имеют разные размеры.
Рисунок 2 . Расположение маркеров на HDM. Всего костюм содержит 51 маркер, как показывают светодиоды, но в модели используется только 41, например, неиспользуемые маркеры присутствуют на пальцах. Маркеры можно легко назначать определенным сегментам модели. Например, маркеры RBHD, RFHD, LFHD и LBHD относятся к головному сегменту, а маркеры RBWT, RFWT, LFWT и LBWT относятся к сегменту таза.
В разделе «Приложение S2» мы представляем метод использования данных маркеров для определения размеров сегментов модели и места прикрепления маркеров к модели.Хотя этот метод можно легко автоматизировать, на практике исследование не опиралось на очень большое количество различных моделей, поэтому в системе используется механизм ослабления точек крепления маркеров и узловых анкеров одним нажатием кнопки в графическом пользовательском интерфейсе ( Рисунок 5 ). С новым набором данных нескольких итераций оказалось достаточно, чтобы создать разумную модель с вложениями маркеров, которые достаточно хорошо соответствуют данным для дальнейшего анализа. Этот алгоритм не рассматривает совместные ограничения диапазона движения.Им тоже можно научиться (Tournier et al., 2009), но в нашем случае диапазон движений для каждого сустава задан априори. После определения длины сегмента мы устанавливаем другие размеры сегмента, чтобы они соответствовали маркерам. Массовые характеристики для каждого сегмента предполагают равномерную плотность по объему.
С новым набором данных нескольких итераций оказалось достаточно, чтобы создать разумную модель с вложениями маркеров, которые достаточно хорошо соответствуют данным для дальнейшего анализа. Этот алгоритм не рассматривает совместные ограничения диапазона движения.Им тоже можно научиться (Tournier et al., 2009), но в нашем случае диапазон движений для каждого сустава задан априори. После определения длины сегмента мы устанавливаем другие размеры сегмента, чтобы они соответствовали маркерам. Массовые характеристики для каждого сегмента предполагают равномерную плотность по объему.
Учитывая данные захвата движения субъекта, модель соответствует размерам субъекта, а диапазон движения сустава ограничивается, чтобы приблизиться к гибкости субъекта. Кроме того, сегменты модели обладают свойствами инерционной матрицы.Первоначальное присвоение массы каждому сегменту предполагает однородную плотность воды (1000 кг/м3) для объема, связанного с каждым твердым телом. Массовое задание должно быть изменено, чтобы примерно соответствовать конкретному предмету. Повышенная точность, необходимая для отдельных субъектов в исследованиях клинической биомеханики, потребует использования более сложных методов для лучшего приближения распределения массы в модели. Однако интересно, что экспериментальные результаты, обсуждавшиеся выше, показывают, что даже этой модели с низкой точностью достаточно для получения высококачественных данных, которые выгодно отличаются от данных, полученных от независимых датчиков.
Повышенная точность, необходимая для отдельных субъектов в исследованиях клинической биомеханики, потребует использования более сложных методов для лучшего приближения распределения массы в модели. Однако интересно, что экспериментальные результаты, обсуждавшиеся выше, показывают, что даже этой модели с низкой точностью достаточно для получения высококачественных данных, которые выгодно отличаются от данных, полученных от независимых датчиков.
2.3. Примерка позы
Решив вопросы привязки модели к данным захвата движения, мы переходим к построению ее способности представлять движения человека. Различные коммерческие пакеты предоставляют разные методы преобразования траекторий маркеров в последовательности поз тела, но они могут занимать много времени, быть дорогими или сложными в использовании. В этом разделе описывается подход, связанный с Demircan et al. (2008) и Zordan and Van Der Horst (2003), который является бесплатным, быстрым, использует интуитивно понятные параметры и позволяет пользователю подгонять маркеры к любой модели по своему желанию.
Метод использует физический движок, чтобы ограничить модель персонажа, чтобы она соответствовала данным маркера и другим ограничениям. Маркеры моделируются как бесконечно массированные точки, прикрепленные к модели персонажа. Имея кадр данных маркера, положение и ориентацию всех сегментов тела можно найти, уравновешивая внутренние цели сустава и данные внешнего маркера. Из глобального положения и ориентации различных сегментов тела становится просто вычислить относительную ориентацию (углы суставов).
Внутренние степени свободы ограничены диапазоном ограничений движения, т.е.г., локти и колени не могут сгибаться назад. Все остальные суставы имеют аналогичные ограничения диапазона движений в зависимости от гибкости субъекта. Кроме того, для каждого сустава задано «целевое состояние» — предпочтительная относительная ориентация между его соединенными телами. Эти предпочтения можно рассматривать как «жесткость мышц» и моделировать их как слабые ограничения с ограниченной силой. Ограничения и жесткость суставов служат в качестве априорных значений по сравнению с возможными позами, поэтому при отсутствии каких-либо маркерных данных модель все равно принимает позу.Следовательно, каждая внутренняя степень свободы в той или иной степени ограничена. Эти ограничения удерживают модель вместе и придают ей позу по умолчанию. Затем, на поворотном этапе, показанном на рис. 3, данные маркера переводят модель из позы по умолчанию в новую позу. Каждый маркер соединен с сегментом тела с помощью шарнирного соединения для данного кадра данных захвата движения. В общей сложности 41 маркер, которые не дают никаких степеней свободы из-за своей бесконечной массы, прикрепляются к модели персонажа, добавляя дополнительные ограничения 3 × 41 = 123.
Ограничения и жесткость суставов служат в качестве априорных значений по сравнению с возможными позами, поэтому при отсутствии каких-либо маркерных данных модель все равно принимает позу.Следовательно, каждая внутренняя степень свободы в той или иной степени ограничена. Эти ограничения удерживают модель вместе и придают ей позу по умолчанию. Затем, на поворотном этапе, показанном на рис. 3, данные маркера переводят модель из позы по умолчанию в новую позу. Каждый маркер соединен с сегментом тела с помощью шарнирного соединения для данного кадра данных захвата движения. В общей сложности 41 маркер, которые не дают никаких степеней свободы из-за своей бесконечной массы, прикрепляются к модели персонажа, добавляя дополнительные ограничения 3 × 41 = 123.
Рисунок 3 . Примерка позы. Первоначально точки данных захвата движения находятся в совершенно другой конфигурации, чем начальная позиция модели. Чтобы найти соответствующие соответствия, смоделированные маркеры прикрепляются к модели гуманоида через шаровые шарниры и втягивают части тела на место в соответствии с ограничениями суставов модели. Последовательность слева направо на рисунке показывает постепенное согласование телесных целей с внешними маркерами.
Последовательность слева направо на рисунке показывает постепенное согласование телесных целей с внешними маркерами.
Наконец, столкновения между землей и ногами также влияют на позу модели.Каждая нога может образовывать до трех точек контакта с землей. Ограничения неравенства в этих точках препятствуют проникновению в грунт. Когда обе ступни твердо стоят на земле, все маркеры активно тянут тело в позу, все суставы удерживают тело вместе, а ограничения и жесткость суставов искажают относительную ориентацию тел. Описанные выше эксперименты показывают, что модель может правильно моделировать силу воздействия на землю.
Этот подход интуитивно понятен: прикрепите маркеры к модели с помощью пружин и перетащите тело за собой.Параметр, настраиваемый для каждого ограничения, известный в ODE как параметр смешивания сил ограничения (CFM), позволяет ограничению проскальзывать пропорционально величине силы, необходимой для поддержания ограничения. Мы используем значение CFM 1 × 10 90 707 -5 90 708 для обычных внутренних соединений тела и контактных ограничений, а также используем 1 × 10 90 707 -4 90 708 для ограничений между маркерами и частями тела. Оба эти значения представляют собой очень жесткие пружины, хотя и различаются на порядок.Эта жесткость стабилизирует симуляцию, позволяя маркерам немного растягиваться от их нанесенных на карту местоположений, если ограничения маркеров несовместимы с моделью персонажа. На рис. 3 показано, что при перемещении маркеров ограничители тянут за собой персонажа.
Оба эти значения представляют собой очень жесткие пружины, хотя и различаются на порядок.Эта жесткость стабилизирует симуляцию, позволяя маркерам немного растягиваться от их нанесенных на карту местоположений, если ограничения маркеров несовместимы с моделью персонажа. На рис. 3 показано, что при перемещении маркеров ограничители тянут за собой персонажа.
2.4. обратная динамика
Может быть полезно знать крутящий момент, прикладываемый к каждому суставу, или требуемое усилие для выполнения определенного движения. Учитывая кинематическую последовательность поз тела, физический движок ODE может архивировать вычисления с минимальными усилиями.Учитывая ограничения, такие как угловая скорость каждого сустава, он может правильно вычислить желаемые измерения крутящих моментов/сил.
Процесс прост. Учитывая текущий угол сочленения и желаемый угол сочленения для следующего кадра, относительная угловая скорость частей тела ограничивается для достижения целевой ориентации на следующем кадре. Контактные ограничения также необходимы для предотвращения проникновения на поверхность земли. Физическая библиотека ODE обрабатывает ограничения и вычисляет крутящие моменты и силы, которые удовлетворяют каждому ограничению в процессе.
Контактные ограничения также необходимы для предотвращения проникновения на поверхность земли. Физическая библиотека ODE обрабатывает ограничения и вычисляет крутящие моменты и силы, которые удовлетворяют каждому ограничению в процессе.
Для вычисления обратной динамики первым шагом является инициализация модели до начального динамического состояния. Исходное состояние можно найти из первого и второго кадров данных кинематической позы. Поза модели устанавливается с использованием второго кадра данных, а начальная линейная и угловая скорость каждого сустава вычисляются путем взятия конечной разницы между двумя кадрами (и деления на временной шаг). Вычисление скорости через конечные разности подходит для физического движка, использующего полунеявное интегрирование Эйлера первого порядка.После этого непрерывно находите крутящие моменты между двумя последовательными кадрами данных позы, используя конечную разницу между позами для вычисления угловых скоростей, которые будут перемещать модель от текущей к следующей позе.
Снова дифференцирование, на этот раз между текущей и будущей скоростью дает целевое ускорение, ограничивающее модель. Основное различие между этим шагом и ранее обсуждавшимся методом определения положения по данным маркера заключается в том, что никакие ограничения маркера не перетаскивают тело на место.Внутренние динамические ограничения направляют модель к целевой позе в каждом кадре, а не к позе «по умолчанию». Поскольку в игре меньше ограничений, используются более жесткие мышечные силы, но абсолютные силы, которые могут прикладывать мышцы, ограничены, чтобы предотвратить неоправданно большие мышечные силы. Опять же, мы можем использовать относительную жесткость пружины, чтобы выразить уверенность в измерениях в этом случае. Мы используем очень жесткие пружины (CFM = 10 −10 ), чтобы удерживать сегменты модели вместе.Мы используем более слабые ограничения, чтобы не допустить проникновения ног в землю (CFM = 10 −5 ) и заставить модель принять соответствующую позу (CFM = 10 −8 ).
2.4.1. Остаточные крутящие моменты/силы
Расчет крутящего момента с помощью HDM идеален в смысле решения обратных динамических уравнений. Обратная динамика использует измеренную кинематику и внешние силы для расчета чистых моментов в суставах в модели сегмента, связанного с твердым телом (van der Kooij et al., 2005).Однако несоответствие между динамическими силами модели и кинематикой реальности приводит к тому, что динамическая модель падает, если не принять меры для ее стабилизации. Следовательно, на практике необходима корректирующая система для непредвиденных ошибок. В системе человека существует множество корректирующих систем, основанных на зрении, проприоцепции и вестибулярной системе. Такие корректирующие системы широко изучались (например, van der Kooij et al., 2005; Sentis et al., 2010; Welch and Ting, 2014).
В классических инверсных динамических областях обычным способом компенсации этой проблемы является введение «остаточных сил и крутящих моментов» (van der Kooij et al. , 2005). В HDM соединение с 6 степенями свободы между поясным сегментом и общей рамой создает внешние силы. Слабая, ограниченная пружина удерживает сегмент талии, чтобы достичь записанного положения относительно общего кадра. Эксперименты показывают, что прикрепление внешнего ограничения к голове или к ногам имеет малозаметную разницу.Нереалистичные внешние силы (остатки) объясняют шум, а также расхождения между моделью и человеком, генерирующим данные. В частности, различия в том, как ступни взаимодействуют с землей, вызывают ошибки в нашем анализе. В большинстве случаев необходимо ограничивать только две из шести угловых степеней свободы (тангаж и крен), оставляя остальные четыре внешние степени свободы отключенными. Два угловых ограничения удерживают тело от падения, но позволяют ему двигаться за счет имитации взаимодействия с землей.
, 2005). В HDM соединение с 6 степенями свободы между поясным сегментом и общей рамой создает внешние силы. Слабая, ограниченная пружина удерживает сегмент талии, чтобы достичь записанного положения относительно общего кадра. Эксперименты показывают, что прикрепление внешнего ограничения к голове или к ногам имеет малозаметную разницу.Нереалистичные внешние силы (остатки) объясняют шум, а также расхождения между моделью и человеком, генерирующим данные. В частности, различия в том, как ступни взаимодействуют с землей, вызывают ошибки в нашем анализе. В большинстве случаев необходимо ограничивать только две из шести угловых степеней свободы (тангаж и крен), оставляя остальные четыре внешние степени свободы отключенными. Два угловых ограничения удерживают тело от падения, но позволяют ему двигаться за счет имитации взаимодействия с землей.
Система стабилизации завершает модель. Это может быть реализовано параллельно с управлением, используемым для стабилизации остатка, необходимого для балансировки.![]() С учетом этого симуляция может воспроизводить высокодинамичные движения (например, см. рис. 4), на котором показана последовательность прыжков, изначально созданная человеком и воссозданная с использованием крутящих моментов, рассчитанных моделью обратной динамики.
С учетом этого симуляция может воспроизводить высокодинамичные движения (например, см. рис. 4), на котором показана последовательность прыжков, изначально созданная человеком и воссозданная с использованием крутящих моментов, рассчитанных моделью обратной динамики.
Рисунок 4 . Иллюстрация возможностей модели. Сложная последовательность прыжков, воспроизведенная с обратной динамикой на основе физического движка с использованием записанных данных захвата движения человека.Воссозданная высота прыжка полностью достигается за счет сил земли, дополненных небольшими остаточными крутящими моментами (≤ 100 Нм), что позволяет модели сохранять равновесие.
2.5. Сводка методов
Мы строим динамическую модель для каждого субъекта-человека и заставляем модель следовать данным захвата движения субъекта, что приводит непосредственно к восстановлению углов суставов. Наш алгоритм ограничивает динамическую модель для отслеживания этих углов и, следовательно, может оценить правильные крутящие моменты в суставах.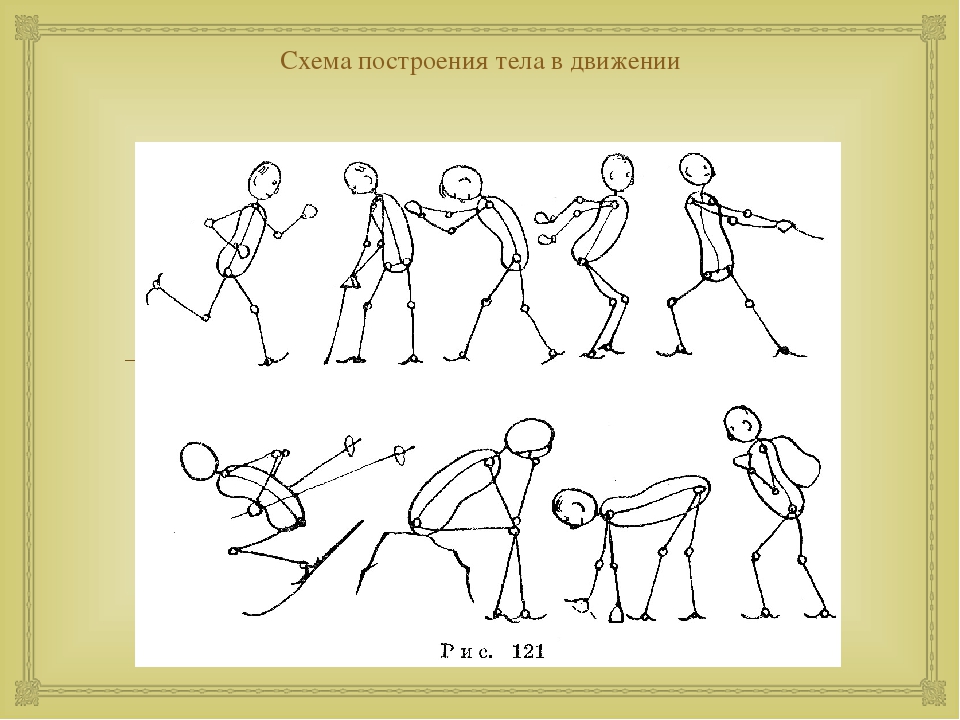 Эта концепция была первоначально продемонстрирована в двух измерениях для ходьбы человека Фором и др. (1997). Мы расширили метод до значительно более требовательного случая 48 степеней свободы в трех измерениях и произвольных изменениях позы. На рис. 1 перечислены сегменты тела. Размеры каждого сегмента соответствуют размерам отдельного субъекта. Основная трудность заключается в том, что ограничения в 3D-модели с высокой степенью свободы создают множество деликатных численных проблем для решателя ОДУ, которые необходимо решить (Cooper and Ballard, 2012).В настоящее время динамическая модель не пытается моделировать компоненты жесткости, в результате чего она может напрямую восстанавливать только чистые крутящие моменты в каждой степени свободы.
Эта концепция была первоначально продемонстрирована в двух измерениях для ходьбы человека Фором и др. (1997). Мы расширили метод до значительно более требовательного случая 48 степеней свободы в трех измерениях и произвольных изменениях позы. На рис. 1 перечислены сегменты тела. Размеры каждого сегмента соответствуют размерам отдельного субъекта. Основная трудность заключается в том, что ограничения в 3D-модели с высокой степенью свободы создают множество деликатных численных проблем для решателя ОДУ, которые необходимо решить (Cooper and Ballard, 2012).В настоящее время динамическая модель не пытается моделировать компоненты жесткости, в результате чего она может напрямую восстанавливать только чистые крутящие моменты в каждой степени свободы.
Расчет массовых свойств имеет решающее значение для моделирования столкновений твердых тел. Масса и инерция вычисляются с использованием объема частей тела с постоянной плотностью 1000 кгм3. Сочленения спроектированы таким образом, чтобы динамическая модель могла имитировать большинство движений человека. Например, локтевые суставы имеют две степени свободы, чтобы представлять шарнирные движения локтя, а также скручивающие движения лучевой и локтевой костей в руке.Углы суставов также ограничены, чтобы избежать невозможных движений, таких как обратное сгибание локтей или коленей.
Например, локтевые суставы имеют две степени свободы, чтобы представлять шарнирные движения локтя, а также скручивающие движения лучевой и локтевой костей в руке.Углы суставов также ограничены, чтобы избежать невозможных движений, таких как обратное сгибание локтей или коленей.
Для сбора данных субъект надевает костюм для захвата движения, разработанный PhaseSpace. Каждый светодиодный маркер на костюме привязан к соответствующей точке на модели. Затем маркеры вводятся в физическое моделирование как кинематические тела без геометрии столкновения. Как эвристика, каждый маркер считается бесконечной массой. Таким образом, когда другое динамическое тело присоединено к маркеру с помощью совместной связи, траектория динамического тела будет полностью следовать траектории маркера.
Система захвата движения PhaseSpace записывает трехмерные положения определенных участков человеческого тела во времени. Когда симуляция продвигается вперед, решатель ограничений адаптирует динамическую модель к состоянию, которое удовлетворяет ограничениям внутреннего соединения, ограничениям внешних маркеров и другим ограничениям, таким как силы грунта и сохранение импульса. Знание кинематики позволяет восстановить динамику, поскольку совместные скорости позволяют инвертировать уравнения движения.Полученные силы можно использовать для создания профилей крутящего момента с прямой связью для приведения в действие персонажа.
Знание кинематики позволяет восстановить динамику, поскольку совместные скорости позволяют инвертировать уравнения движения.Полученные силы можно использовать для создания профилей крутящего момента с прямой связью для приведения в действие персонажа.
Использование динамической модели человека для анализа движений человека включает следующие пять шагов:
1. Этап синтеза движения: он представляет движение человека с точки зрения данных захвата движения.
2. Шаг инверсной кинематики: встроенные функции ODE вызываются для вычисления угловых скоростей и углов суставов в каждом кадре.
3. Шаг прямой кинематики: движения человека моделируются на основе углов суставов и угловых скоростей, полученных на предыдущем шаге.Этот шаг предназначен для проверки правильности восстановленных кинематических свойств.
4. Шаг обратной динамики: встроенные функции ODE вызываются для расчета требуемых крутящих моментов в суставах.
5. Шаг прямой динамики: движения человека моделируются на основе вычисленных крутящих моментов и остаточных сил. Этот шаг заключается в проверке восстановленных динамических свойств по сравнению с исходными движениями.
Этот шаг заключается в проверке восстановленных динамических свойств по сравнению с исходными движениями.
В каждом кадре мгновенная мощность вычислялась как произведение чистого крутящего момента в суставе и угловой скорости в суставе.Работа, выполняемая в каждом суставе, определялась путем численного интегрирования мгновенных мощностей по всей задаче трассировки. Таким образом, затраты энергии на движения человека могут быть рассчитаны на основе данных захвата движения. Общая идея метода расчета крутящих моментов/углов в суставах проста, если использовать нашу реализацию в ODE. Математика, лежащая в основе программного обеспечения для моделирования твердого тела, используемого в нашей работе, объясняется в разделе «Приложение».
3. Результаты — основные возможности HDM
HDM — это быстрый, надежный, интуитивно понятный и недорогой многоцелевой инструмент для моделирования, анализа и синтеза движений гуманоидов.На рис. 5 показан кадр отслеживания движений, собранный в ходе эксперимента с виртуальной реальностью (Liu et al. , 2019). Пользователи могут задавать конфигурации динамической модели человека с помощью многоцелевого графического интерфейса для анализа данных о движении, полученных при взаимодействии с виртуальной средой. С помощью этого инструмента можно вручную подгонять модель под данные захвата движения, динамически настраивать параметры для тестирования различных эффектов и визуализировать результаты кинематического и динамического анализа. В показанном конкретном эксперименте подобранная модель субъекта прослеживает виртуальную кривую для создания траектории кинематической позы, которая позволяет рассчитать стоимость динамической модели субъекта.
, 2019). Пользователи могут задавать конфигурации динамической модели человека с помощью многоцелевого графического интерфейса для анализа данных о движении, полученных при взаимодействии с виртуальной средой. С помощью этого инструмента можно вручную подгонять модель под данные захвата движения, динамически настраивать параметры для тестирования различных эффектов и визуализировать результаты кинематического и динамического анализа. В показанном конкретном эксперименте подобранная модель субъекта прослеживает виртуальную кривую для создания траектории кинематической позы, которая позволяет рассчитать стоимость динамической модели субъекта.
Рисунок 5 . Соответствующие параметры для анализа и моделирования физических движений необходимо настраивать вручную. Параметры модели состоят из параметров физического мира, ограничений суставов и относительного положения маркеров тела модели. На этом изображении показано, как пользователи могут получить текущие конфигурации HMD, нажимая кнопки в крайнем правом вертикальном меню.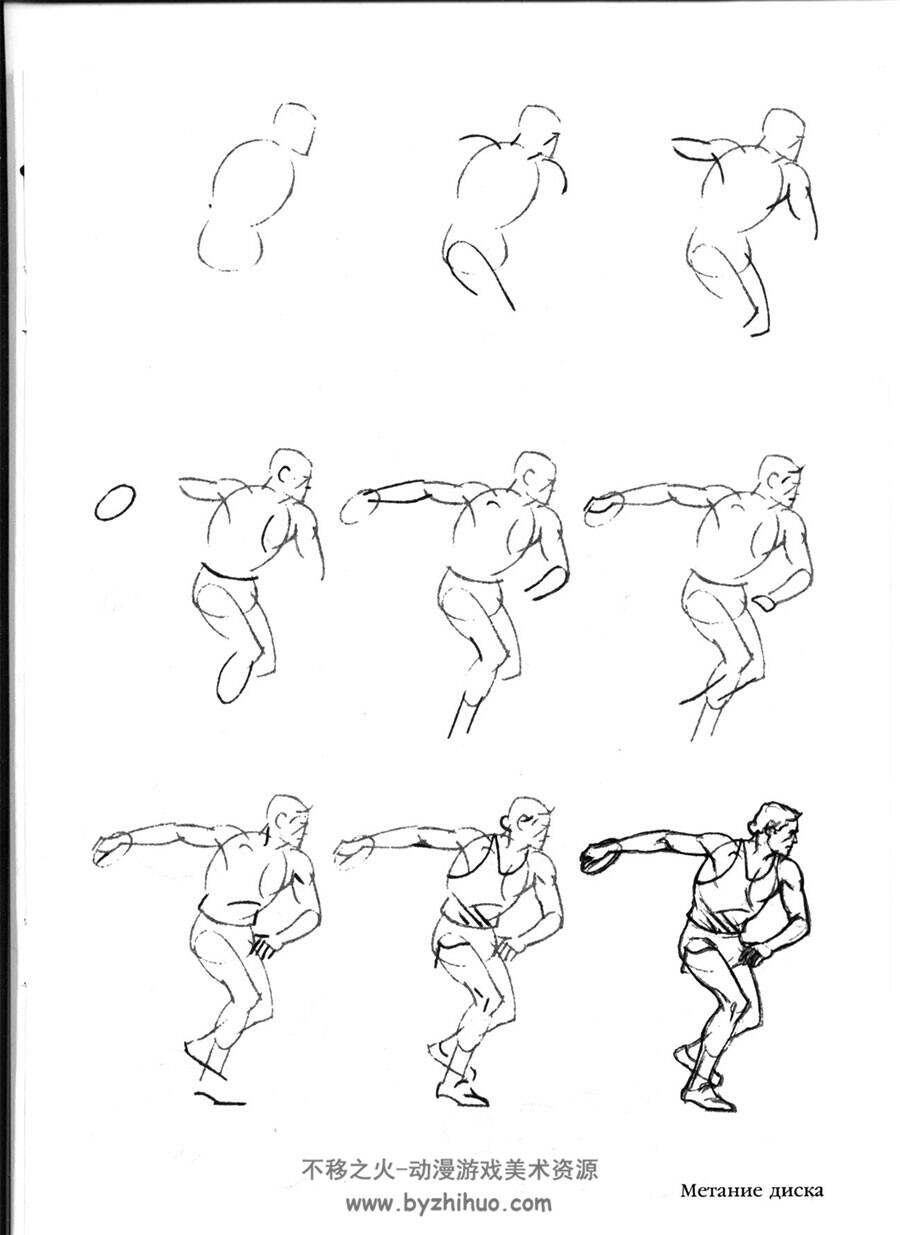 Выбрано «Маркер», что означает, что отображается информация о маркере: (1) Первый столбец представляет кнопки указателя маркера.Кнопки синего цвета означают, что соответствующие маркеры прикреплены к HDM. Пользователи могут прикреплять/отсоединять маркеры, нажимая кнопки указателя. (2) Во втором столбце показаны сегменты тела, к которым прикреплены маркеры. Каждый спин-бокс является собирательным элементом всех названий сегментов тела. Пользователи могут использовать его для изменения отношения прикрепления тела к маркеру. (3) В трех-пяти столбцах представлены относительные положения маркера и тела. Пользователи могут изменять значения непосредственно с помощью этого интерфейса. (4) Кнопка «Подключить» и кнопка «Отпустить» вверху предназначены для присоединения или отсоединения всех маркеров соответственно.Кнопка «Обновить привязку» автоматически обновляет относительные положения маркера и тела на основе текущей позы движения.
Выбрано «Маркер», что означает, что отображается информация о маркере: (1) Первый столбец представляет кнопки указателя маркера.Кнопки синего цвета означают, что соответствующие маркеры прикреплены к HDM. Пользователи могут прикреплять/отсоединять маркеры, нажимая кнопки указателя. (2) Во втором столбце показаны сегменты тела, к которым прикреплены маркеры. Каждый спин-бокс является собирательным элементом всех названий сегментов тела. Пользователи могут использовать его для изменения отношения прикрепления тела к маркеру. (3) В трех-пяти столбцах представлены относительные положения маркера и тела. Пользователи могут изменять значения непосредственно с помощью этого интерфейса. (4) Кнопка «Подключить» и кнопка «Отпустить» вверху предназначены для присоединения или отсоединения всех маркеров соответственно.Кнопка «Обновить привязку» автоматически обновляет относительные положения маркера и тела на основе текущей позы движения.
В этом разделе основное внимание уделяется описанию возможностей модели с помощью ряда примеров в различных условиях. Несколько тестовых экспериментов обеспечивают качественную и количественную проверку описанных здесь методов физического анализа движения.
Несколько тестовых экспериментов обеспечивают качественную и количественную проверку описанных здесь методов физического анализа движения.
3.1. HDM Точность
Учитывая, что метод восстановления крутящего момента будет основой для наших экспериментов, важно установить его точность в абсолютном выражении.Простой способ сделать это — использовать конкретную модель для получения данных о крутящем моменте в соединении, а затем убедиться, что эти генерирующие крутящие моменты могут быть восстановлены с достаточной точностью. Чтобы проверить точность модели и чувствительность к шуму, мы сначала используем систему захвата движения PhaseSpace для сбора данных о ходьбе, а затем позволяем модели моделировать движение при ходьбе. Чтобы смоделировать возможные ошибки датчиков в системе PhaseSpace, мы вносим шум в смоделированные положения маркеров и изучаем точность восстановления с увеличением уровня шума.
3.1.1. Допуск чувствительности данных модели
Вычисления обратной динамики основаны на первом нахождении положения модели. Поэтому, учитывая данные захвата движения, важно точно синтезировать последовательность поз. Мы использовали HDM для синтеза ходьбы на беговой дорожке, а затем рассчитали ее точность. Это исследование было направлено на оценку влияния возмущений датчика на результаты и сравнение углов и крутящих моментов суставов, полученных с помощью нашего метода, с теми, которые использовались для получения данных маркеров. Мы использовали экспериментальный процесс, аналогичный тому, который использовался в Remy and Thelen (2009).В этом эксперименте оба шага были проверены путем изучения восьми шагов маркерных данных, полученных при ходьбе на беговой дорожке. Движение длится чуть дольше 4 с, что дает нам 260 кадров данных. Для этого расчета мы использовали данные, произвольно выбранные с частотой 60 Гц.
Поэтому, учитывая данные захвата движения, важно точно синтезировать последовательность поз. Мы использовали HDM для синтеза ходьбы на беговой дорожке, а затем рассчитали ее точность. Это исследование было направлено на оценку влияния возмущений датчика на результаты и сравнение углов и крутящих моментов суставов, полученных с помощью нашего метода, с теми, которые использовались для получения данных маркеров. Мы использовали экспериментальный процесс, аналогичный тому, который использовался в Remy and Thelen (2009).В этом эксперименте оба шага были проверены путем изучения восьми шагов маркерных данных, полученных при ходьбе на беговой дорожке. Движение длится чуть дольше 4 с, что дает нам 260 кадров данных. Для этого расчета мы использовали данные, произвольно выбранные с частотой 60 Гц.
Мы использовали предварительный проход данных захвата движения для создания синтезированного маркера «наземной истины», положения и крутящего момента. После использования обратной кинематики, основанной на физике, для вычисления углов суставов, мы заставили тело использовать обратную динамику для воспроизведения углов суставов с внутренними крутящими моментами (и остаточными силами в сегменте талии). По мере того, как модель совершала движение, мы записывали глобальное положение точек крепления маркеров. Мы также записали использованные силы и результирующие углы суставов. Таким образом, у нас были синтетические данные «наземной истины» непосредственно из модели. Модель способна упасть, если этого не произошло, мы зафиксировали тест как успешный.
По мере того, как модель совершала движение, мы записывали глобальное положение точек крепления маркеров. Мы также записали использованные силы и результирующие углы суставов. Таким образом, у нас были синтетические данные «наземной истины» непосредственно из модели. Модель способна упасть, если этого не произошло, мы зафиксировали тест как успешный.
Используя данные синтетических маркеров, мы проанализировали процесс, искажая положение всех маркеров в каждом кадре во времени по всем трем осям с помощью среднецентрированного гауссова шума контролируемого стандартного отклонения.Применение основанного на физике подбора позы с последующей обратной динамикой позволило получить новый набор положений виртуальных маркеров, углов суставов и крутящих моментов. Результаты показаны на рисунке 6.
Рисунок 6 . Чувствительность модели к шуму. Ошибки шарнирных углов и внутренних крутящих моментов, возникающие в результате обратной кинематики и обратной динамики, основанных на физике, используются для анализа возмущенных данных маркеров. Мы повторили процесс двадцать раз для каждого уровня шума при девяти различных стандартных отклонениях.Стандартные отклонения в мм были (0,1, 0,5, 1, 2, 4, 8, 16, 32, 64). Столбики погрешностей показывают стандартную ошибку среднего. (A) Точность устройства захвата движения PhaseSpace составляет ~5 мм в рабочей области 3 × 6 м, что приводит к средней угловой ошибке 1°. (B) Те же оценки погрешности крутящего момента составляют от 5 до 10 Нм, обычно ~1%. Эти небольшие ошибки вполне соответствуют требованиям наших экспериментов. (C) Позы, сгенерированные прямой динамикой с использованием сил, полученных в результате трех симуляций обратной динамики на основе данных о ходьбе с гауссовскими возмущениями (0.уровни шума 1, 8 и 64 мм). Хотя при очень высоких уровнях шума модель плохо следует эталонному движению, движение по-прежнему выглядит качественно как ходьба.
Мы повторили процесс двадцать раз для каждого уровня шума при девяти различных стандартных отклонениях.Стандартные отклонения в мм были (0,1, 0,5, 1, 2, 4, 8, 16, 32, 64). Столбики погрешностей показывают стандартную ошибку среднего. (A) Точность устройства захвата движения PhaseSpace составляет ~5 мм в рабочей области 3 × 6 м, что приводит к средней угловой ошибке 1°. (B) Те же оценки погрешности крутящего момента составляют от 5 до 10 Нм, обычно ~1%. Эти небольшие ошибки вполне соответствуют требованиям наших экспериментов. (C) Позы, сгенерированные прямой динамикой с использованием сил, полученных в результате трех симуляций обратной динамики на основе данных о ходьбе с гауссовскими возмущениями (0.уровни шума 1, 8 и 64 мм). Хотя при очень высоких уровнях шума модель плохо следует эталонному движению, движение по-прежнему выглядит качественно как ходьба.
Гауссовы возмущения делают данные маркера динамически несогласованными. Эта динамическая несогласованность также подталкивает систему с ограничениями к сингулярности, что усложняет численное решение. Мы включили очень высокие уровни шума, чтобы посмотреть, замедлят ли они работу системы или помешают ей найти какое-либо решение.Во всех случаях система анализировала искаженные данные и находила позы, соответствующие данным маркера.
Эта динамическая несогласованность также подталкивает систему с ограничениями к сингулярности, что усложняет численное решение. Мы включили очень высокие уровни шума, чтобы посмотреть, замедлят ли они работу системы или помешают ей найти какое-либо решение.Во всех случаях система анализировала искаженные данные и находила позы, соответствующие данным маркера.
После выполнения прохода инверсной кинематики, прохода инверсной динамики для каждого пробного прогона, мы сравнили точки крепления маркера, углы сочленений и крутящие моменты сочленений со второго прохода с синтетическими наземными данными. На рис. 6 показана средняя ошибка по всем степеням свободы при восьмишаговой ходьбе. Хотя возмущения делают данные маркера динамически несогласованными, небольшое количество шума оказывает минимальное влияние на вычисляемые измерения.На рисунках 6А, В стандартные отклонения ошибок показывают, что функциональные эффекты минимальны до 8 мм. Точность положения маркера PhaseSpace ±1 мм соответствует в нашей модели средней ошибке угла соединения 0,02 радиана и средней ошибке силы 3 ньютона, что является приемлемым для наших экспериментов.
Существует систематическая ошибка как в положениях маркеров, так и в углах соединения, вызванная тем, что зависимости ведут себя как пружины. Подобное пружине поведение приводит к тому, что положения маркеров и углы суставов немного отстают от своих целевых значений и гасят общее движение.Это отставание и демпфирование видны на рисунке 7 при сравнении отдельных траекторий для выбранных размеров углов соединения и крутящих моментов. Как показано на Рисунке 7, данные очень хорошо следуют наземным истинам в условиях низкого уровня шума.
Рисунок 7 . Реконструкция траектории. Траектории выбранных степеней свободы из исследования возмущения. Сплошные линии показывают наземную правду, рассчитанную на основе данных захвата движения. Пунктирные линии показывают восстановленные данные. Смоделированные силы пружины заставляют вычисленные данные отставать и сглаживают истину.
3.1.2. Остаточные крутящие моменты/силы и наземные силы
В классической обратной динамической области расхождения между моделью и людьми, которые создали данные, требуют нереалистичных «остаточных» сил, чтобы удержать модель от падения при динамическом воспроизведении большинства движений. HDM включает соединение с талией модели, чтобы ограничить ее и воспроизвести отклонения ориентации, обнаруженные во время прохода подгонки позы. Чтобы свести к минимуму влияние этих внешних сил, мы использовали ограничения крутящего момента на величину доступного стабилизирующего крутящего момента.
HDM включает соединение с талией модели, чтобы ограничить ее и воспроизвести отклонения ориентации, обнаруженные во время прохода подгонки позы. Чтобы свести к минимуму влияние этих внешних сил, мы использовали ограничения крутящего момента на величину доступного стабилизирующего крутящего момента.
Полностью сконфигурированную систему можно протестировать на основе объективного набора измерений. Мы сравнили данные HDM вместе с данными о наземных силах с пары балансировочных досок. На рис. 8 показана калибровка силы на грунт, рассчитанная с помощью нашего метода, по сравнению с калибровкой, взятой из силовых плит Wii TM . Субъект, стоящий на двух силовых пластинах, менял свою стойку, поддерживая ее исключительно ногой, стоящей на одной пластине, а затем переносил свой вес на другую ногу, поддерживаемую другой пластиной.Для этого простого движения перехода из положения стоя на одной ноге в другую остаточных угловых крутящих моментов в 30 Нм было достаточно, чтобы удерживать динамическую модель достаточно близко к целевой траектории.
Рисунок 8 . Сравнение силы грунта между моделью и силовой плитой Wii. (Вверху) Две силовые пластины Wii служат для точной калибровки. Испытуемый вставал на две пластины, а затем менял позы, балансируя сначала на левой ноге, а затем на правой. (Внизу) Сравнение между системами измерения на удивление хорошее во время фаз опоры. 10-процентную разницу между измеренными Wii наземными силами и рассчитанными силами можно согласовать, включив остаточные балансовые силы модели.
Остаточные крутящие моменты очень скромны и находятся в пределах ±5% от максимального отклонения. Соответствие немного лучше, так как силы искусственного вестибулярного баланса не учитываются при сравнении. Также обратите внимание, что мы не можем ожидать, что соответствие будет точным во время фазы между двумя стойками, так как в модели этого теста нет попытки сделать динамику изменения стойки соответствующей динамике силовых пластин. Для создания независимых движений, таких как хватание, может потребоваться дополнительная точность (Sentis et al., 2010), но для оценки энергетических затрат субъекта точность находится в пределах диапазона.
Для создания независимых движений, таких как хватание, может потребоваться дополнительная точность (Sentis et al., 2010), но для оценки энергетических затрат субъекта точность находится в пределах диапазона.
На рис. 8 также показаны результаты сравнения измеренных датчиком сил на грунт для правой и левой стопы (красная и зеленая линии) с расчетными силами на грунт, полученными с помощью обратной динамики, основанной на физике (синие и розовые линии). Во время фазы стояния на двух ногах силы подходят на удивление близко.Наиболее значительные расхождения возникают при переходе с одной ноги на другую. Эти несоответствия можно объяснить главным образом плохим обнаружением столкновений, возникающим из-за абстрактной модели стопы.
3.2. Экспериментальная оценка HDM
Предыдущие демонстрации сообщают о тестах основных характеристик системы. В этом разделе основное внимание уделяется трем тестам способности HDM соответствовать экспериментальным данным. В первом тесте испытуемый последовательно выполняет все более сложные задачи в среде виртуальной реальности, чтобы проверить, коррелирует ли оценка модели стоимости движения с возрастающей сложностью задачи. Второй тест имитирует данные о проблеме, с которой сталкиваются стареющие люди. Влияет ли снижение частоты размахивания руками во время ходьбы у стареющих испытуемых на движение, и соответствует ли оценка HDM лабораторным данным беговой дорожки? Последний тест демонстрирует существенное свойство модели, касающееся ее степеней свободы. Критическое наблюдение состоит в том, что достоинства их взаимосвязей ограничивают степень свободы модели; таким образом, контроль осанки может быть достигнут с помощью значительно уменьшенного набора критических позиций маркеров.Это свойство имеет значение для программ управления движением.
Второй тест имитирует данные о проблеме, с которой сталкиваются стареющие люди. Влияет ли снижение частоты размахивания руками во время ходьбы у стареющих испытуемых на движение, и соответствует ли оценка HDM лабораторным данным беговой дорожки? Последний тест демонстрирует существенное свойство модели, касающееся ее степеней свободы. Критическое наблюдение состоит в том, что достоинства их взаимосвязей ограничивают степень свободы модели; таким образом, контроль осанки может быть достигнут с помощью значительно уменьшенного набора критических позиций маркеров.Это свойство имеет значение для программ управления движением.
3.2.1. Эксперимент 1: Достижение
всем телом Тест на точность движений обнадеживает, но важность этого метода зависит от его пригодности для определения энергетических затрат на движения всего тела в сложных экспериментальных условиях. Одним из таких мест является трехмерная среда виртуальной реальности (VR). Преимущество виртуальной среды для изучения движений человека состоит в том, что размеры и динамические изменения параметрических величин, описывающих обстановку, можно варьировать при полном экспериментальном контроле.
В этом эксперименте мы изучали, как испытуемый выбирает движения всего тела для достижения цели. На рис. 9 показана экспериментальная установка. Субъект носит костюм для захвата движения PhaseSpace и стереофонический дисплей nVisor, закрепленный на голове. В каждом следе субъект начинает с определенного исходного положения, отмеченного лентой на полу лаборатории, приближается к цели, подвешенной в трехмерном пространстве, и, наконец, касается ее.
Рисунок 9 . Достижение в среде виртуальной реальности. (A) Субъект дотрагивается до виртуальных целей, видимых в HMD. Досягаемость субъекта ничем не ограничена. (B) Субъект достигает целей с разными номерами в разных попытках. (C) Средний интегрированный крутящий момент по 10 испытаниям на досягаемость показывает, что метод надежно различает затраты на перемещение для более дальних и более высоких местоположений.
Тесты смогли установить, что, просто сосредоточившись на интегрированном чистом крутящем моменте и избегая жесткости, относительная стоимость движения, зарегистрированная нашей системой, надежно различает энергетические затраты на движение предполагаемым образом. Предполагаемая стоимость достижения и прикосновения к каждой цели ранжировалась на основе расстояния и высоты по отношению к субъекту. Обратите внимание, что цель 2 является наименее затратной, поскольку субъекту не нужно приседать или значительно вытягиваться, чтобы коснуться ее. Цели с 5 по 8 обходятся дороже, чем цели с 1 по 4, поскольку они требуют, чтобы субъект сделал шаг, чтобы коснуться их. Эти результаты были ожидаемы, но цель состояла в том, чтобы показать, что общая настройка и модель могут дать надежные оценки крутящего момента.
Предполагаемая стоимость достижения и прикосновения к каждой цели ранжировалась на основе расстояния и высоты по отношению к субъекту. Обратите внимание, что цель 2 является наименее затратной, поскольку субъекту не нужно приседать или значительно вытягиваться, чтобы коснуться ее. Цели с 5 по 8 обходятся дороже, чем цели с 1 по 4, поскольку они требуют, чтобы субъект сделал шаг, чтобы коснуться их. Эти результаты были ожидаемы, но цель состояла в том, чтобы показать, что общая настройка и модель могут дать надежные оценки крутящего момента.
Эта демонстрация показывает, что модель может использоваться в любых условиях, где предполагается, что стоимость движения является определяющим фактором.Мы развиваем эту технику дальше в следующей демонстрации.
3.2.2. Эксперимент 2: цена ходьбы на прямых руках
После того, как параметры жесткости сустава были отрегулированы надлежащим образом, может ли он воспроизвести результаты эксперимента по модулированию жесткости? Эксперимент, который мы попытались повторить, состоял в том, чтобы повторить эксперимент Ортеги и др.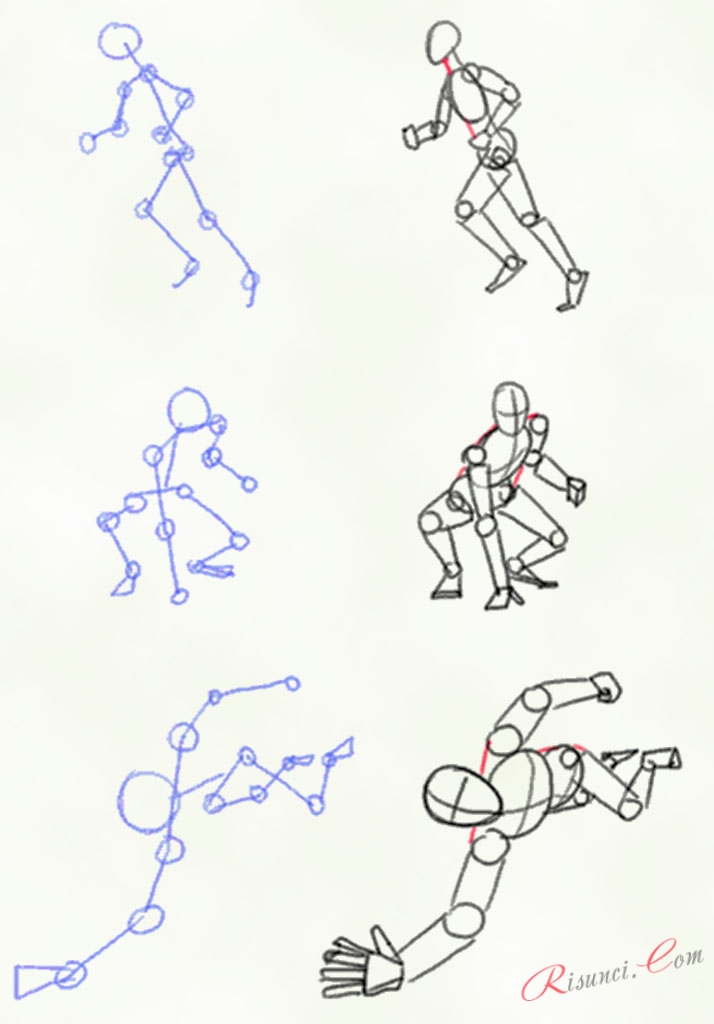 (2008). Они показали, что остановка маха руками во время ходьбы на беговой дорожке приводит к увеличению метаболических затрат на 6%. Наша гипотеза заключалась в том, что для воспроизведения этого результата мы могли изменить данные о ходьбе для модели так, чтобы руки были зажаты по бокам с жесткими неподвижными маркерами.
(2008). Они показали, что остановка маха руками во время ходьбы на беговой дорожке приводит к увеличению метаболических затрат на 6%. Наша гипотеза заключалась в том, что для воспроизведения этого результата мы могли изменить данные о ходьбе для модели так, чтобы руки были зажаты по бокам с жесткими неподвижными маркерами.
Чтобы проверить эту возможность, мы использовали один из наших наборов данных ходьбы HDM в тестовой ситуации. Стоимость ходьбы была рассчитана с помощью модификации, предназначенной для моделирования экспериментального протокола Ortega et al. (2008). Чтобы имитировать их эксперимент, мы изменили данные модели, чтобы руки могли качаться при ходьбе в стандартном случае, но в ограниченном случае руки были ограничены маркерами, которые двигаются вместе с шагом, но не могут качаться. Поскольку руки в ограниченных ситуациях не могли сбалансировать движения ног, мы ожидали, что энергетические затраты будут выше.Как показано на рис. 10, в результате вынужденная прогулка обошлась примерно на 6 % дороже, чем стандартная прогулка, которая, по сути, соответствовала значению, полученному в лаборатории Фарли (Ortega et al. , 2008). Использование HDM для имитации этого эксперимента демонстрирует полезность модели; для получения предварительного результата не требовалось никакой сложной настройки, кроме удержания рук. Следует понимать, что для программирования эксперимента с моделью потребовалось всего несколько часов, в то время как для подготовки эксперимента на людях требуется много дней, и соответствующая мера стоимости является деликатной.
, 2008). Использование HDM для имитации этого эксперимента демонстрирует полезность модели; для получения предварительного результата не требовалось никакой сложной настройки, кроме удержания рук. Следует понимать, что для программирования эксперимента с моделью потребовалось всего несколько часов, в то время как для подготовки эксперимента на людях требуется много дней, и соответствующая мера стоимости является деликатной.
Рисунок 10 . Сравнение усилий при ходьбе с махом руки и без него. (A) В предварительном тесте нашей конструкции энергетические затраты на обычную ходьбу сравниваются со случаем, когда руки не могут раскачиваться. Наша гипотеза состоит в том, что если испытуемым дать указание ходить, не двигая руками, они сделают это за счет совместного сокращения мышц, и что этот эффект может быть реализован в HDM с неподвижными маркерами, удерживающими руки в вертикальном положении. (B) Увеличение стоимости, измеренное HDM, составляет 6,1%, что очень близко к результату 6%, полученному Ortega et al. (2008).
(2008).
3.2.3. Эксперимент 3: управление позами с помощью уменьшенных наборов маркеров
Последовательности поз человека, полученные в результате простых движений одного поведения, лежат в линейном подпространстве очень низкой размерности (Barbič et al., 2004). Предыдущие исследования показали, что для многих движений с подходящей внутренней жесткостью необходимо только контролировать расположение сокращенного набора, состоящего из маркеров головы, рук и ног (Liu et al., 2006). Это наблюдение является центральным элементом теории неуправляемых многообразий , которая ограничивает управление подпространством степеней свободы, оставляя остальное естественной системной динамике (Шольц и Шёнер, 1999; Торрес-Овьедо и Тинг, 2007). Очевидным является катание на коньках. Пары, вращающиеся на льду, будут использовать один набор производителей, а прыжки — другой набор. Другой пример: использование подмножества маркеров для ограничения динамики все еще дает приемлемую походку. Это свойство также можно было бы ожидать от исследований мышечной синергии, которые показывают, что мышечные сокращения координируются при генерации движения (Ting and Macpherson, 2005; Ting, 2007). Как описано выше, HDM использует 41 маркер, что означает, что поза представлена в 123-мерной системе координат. Наш тест сравнивает сгенерированную позу с использованием уменьшенного набора маркеров с позой, использующей полный набор маркеров. Тесты на точность движения показали, что механизм динамики мог работать со значительно меньшим количеством маркеров.Еще одно преимущество заключается в том, что меньшее количество маркеров может упростить интерполяцию по выпадающим данным.
Это свойство также можно было бы ожидать от исследований мышечной синергии, которые показывают, что мышечные сокращения координируются при генерации движения (Ting and Macpherson, 2005; Ting, 2007). Как описано выше, HDM использует 41 маркер, что означает, что поза представлена в 123-мерной системе координат. Наш тест сравнивает сгенерированную позу с использованием уменьшенного набора маркеров с позой, использующей полный набор маркеров. Тесты на точность движения показали, что механизм динамики мог работать со значительно меньшим количеством маркеров.Еще одно преимущество заключается в том, что меньшее количество маркеров может упростить интерполяцию по выпадающим данным.
На рис. 11 показано качественное сравнение между позой, найденной с использованием всего набора маркеров (слева), и позой, найденной с использованием только головы, рук и ног (справа). Чтобы достичь позы с уменьшенным маркером, мы начали модель в вертикальном положении с руками по бокам, а затем маркеры с уменьшенным набором медленно перемещались по траекториям, которые оставляли их в конечной позе. Прямые руки используют ограничение угла локтевого сустава.
Прямые руки используют ограничение угла локтевого сустава.
Рисунок 11 . Управление движением с использованием динамической синергии. (A) Конфигурация тела с использованием всех ограничений маркера. Обратите внимание на сходство с позой с редкими ограничениями. (B) Конфигурация тела с использованием зависимостей только для головы, рук и ног. Во многих случаях поза, найденная с использованием полного набора ограничений маркера, довольно близка к позе, найденной с помощью разреженного набора ограничений. Эти два изображения почти не показывают различий между использованием полного или разреженного набора ограничений маркера.
Ограничения суставов в коленях и локтях и общая жесткость суставов естественным образом смещают физический движок, чтобы найти позу, которая очень близка к позе с полным ограничением. Инерция тела и жесткость суставов естественным образом устраняют незначительные шумы и окклюзии в захваченных данных маркеров. Полученные углы соединения при транспортировке позволяют определить полный набор динамических крутящих моментов. Чтобы количественно протестировать эту особенность HDM, восстановленные углы суставов при ходьбе по уменьшенному набору маркеров сравнивали с таковыми по полному набору маркеров.На рис. 12 показано, что восстановленные углы суставов очень похожи на исходные углы суставов.
Полученные углы соединения при транспортировке позволяют определить полный набор динамических крутящих моментов. Чтобы количественно протестировать эту особенность HDM, восстановленные углы суставов при ходьбе по уменьшенному набору маркеров сравнивали с таковыми по полному набору маркеров.На рис. 12 показано, что восстановленные углы суставов очень похожи на исходные углы суставов.
Рисунок 12 . Сравнение углов соединения по выбранной степени свободы. Сплошные линии показывают углы соединения, восстановленные на основе полного набора маркеров. Пунктирные линии показывают суставные ангелы, восстановленные на основе уменьшенного набора маркеров.
Этот результат имеет важные общие следствия. Прежде всего, открытие предполагает, что кинематический план движений может быть сжат в подмножество формирующих траекторий, оставляя оставшиеся степени свободы интерполированными с использованием динамического ограничения тела.Другой аспект этого наблюдения заключается в том, что сокращенный набор можно использовать для адаптации движений к индивидуальным обстоятельствам, опять же оставляя детальную интерполяцию динамике.
4. Заключение и обсуждение
В этом документе представлен метод построения модели гуманоида на основе физического движка, который может анализировать и синтезировать движения человека. Его 48 степеней свободы и обобщенные пружинные ограничения позволяют создавать масштабные модели, устойчивые к возмущениям. Помимо того, что он является аналитическим инструментом для экспериментов, он также может генерировать движения по кинематическому плану.Система имеет несколько особенностей:
1. Он использует реализации ограничений как неявные пружины. Параметры пружины обладают многими полезными свойствами. Они стабилизируют моделирование, отталкивая систему с ограничениями от сингулярностей и уменьшая ошибку ограничения.
2. Рассчитывает энергетические затраты на движения, чтобы обеспечить возможность сравнения различных сценариев движения. Достижение этой цели может быть затруднено из-за отсутствия систем, которые могут обеспечить независимые измерения затрат.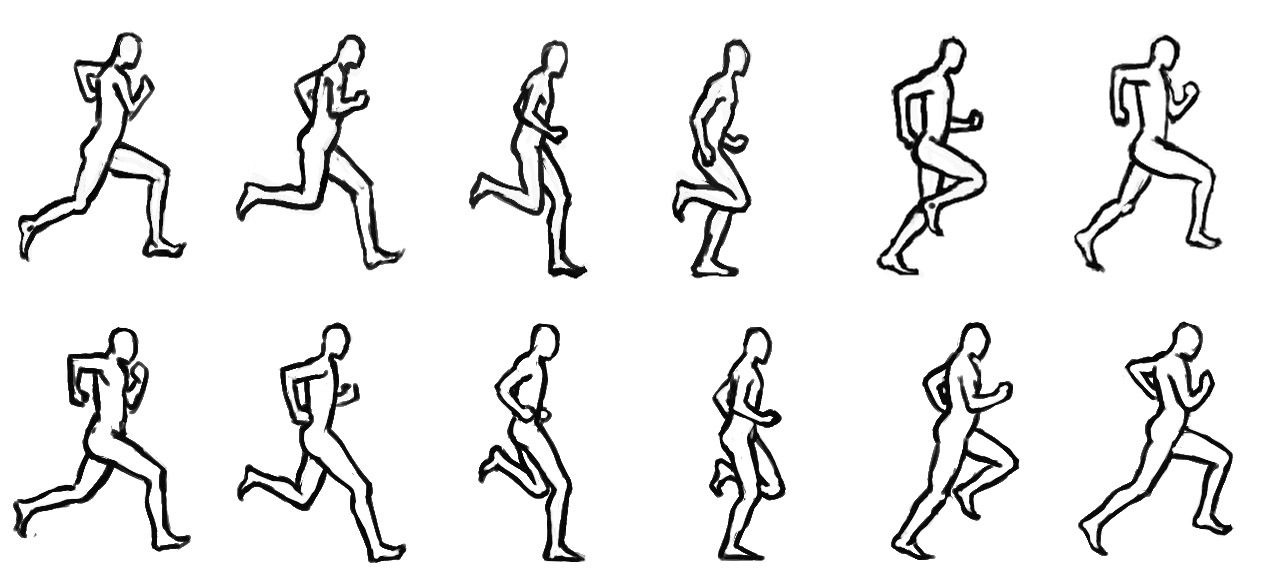 HDM достиг превосходного соответствия силовым пластинам, как показано в эксперименте по измерению изменения позы человека.
HDM достиг превосходного соответствия силовым пластинам, как показано в эксперименте по измерению изменения позы человека.
3. Он дает корреляции с аналогичными тестами на людях, такими как наше исследование с ходьбой на прямых руках. После того, как мы проверили систему во многих таких областях, ее можно использовать в качестве инструмента прогнозирования, как в эксперименте, показывающем различные затраты на достижение целей. Мы разработали крупномасштабный эксперимент по трехмерному отслеживанию в виртуальной реальности (Liu et al., 2019), чтобы вызвать естественные движения всего тела в соответствии с общими целями. Наша будущая работа заключается в анализе энергетических затрат с использованием HDM.
4. Это показывает, что такая модель может играть ценную роль в изучении следствий модели кинематического плана. В частности, демонстрация управления с уменьшенной степенью свободы поддерживает представление о неуправляемом многообразии , в котором подмножество критических степеней свободы может направлять движение с неуправляемыми степенями свободы, интерполирующими движение с использованием динамики системы (Carpenter, 1968; Latash, 2008).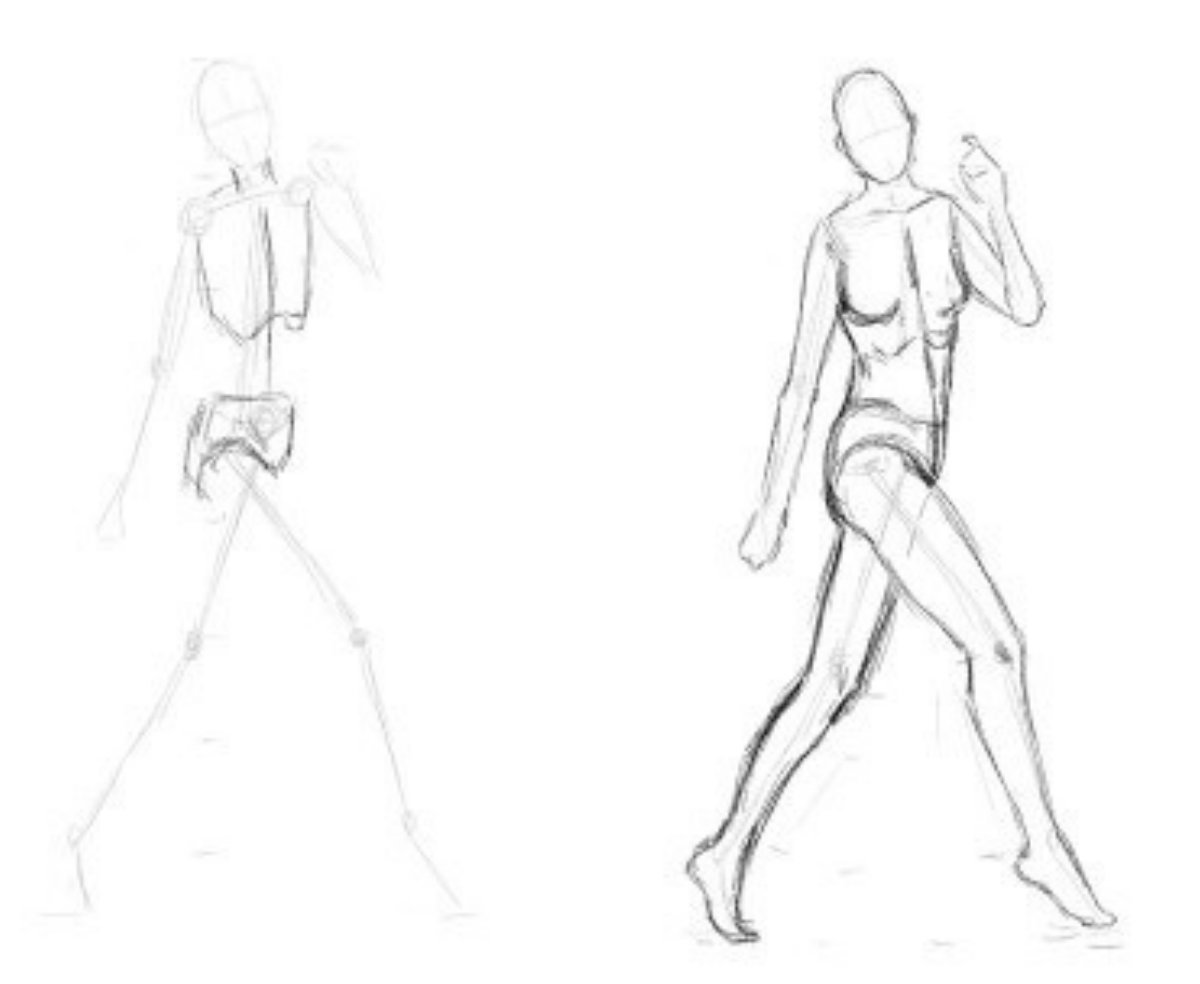 ).
).
Одним из способов демонстрации надежности метода является объединение набора кинематических данных из источника с другим набором динамических параметров. До сих пор мы исследовали возможность HMD использовать данные из двух других лабораторий. Одним из источников является база данных захвата движения графической лаборатории Университета Карнеги-Меллона. Другим источником являются данные о движении из лаборатории Хейхо на факультете психологии Техасского университета, данные захвата движения от субъектов, пересекающих пересеченную местность на открытом воздухе.В тестах данные, собранные с помощью другого устройства захвата движения, объединяются с инерционными данными другой модели для создания композита. Мы могли бы использовать наши динамические расчеты для вычисления крутящих моментов для гибридной системы, приняв соглашения о маркерах импортированной базы данных. Хотя оценка, таким образом, делается для синтетической пары кинематических данных и динамических параметров, эта комбинация, интеграция является стабильной и приводит к идентифицируемым крутящим моментам.
Помимо использования механизма для интерпретации экспериментов, система может также служить дополнением к теоретизированию об организации человеческой системы в отношении ее пространственно-временных характеристик, поскольку многие из этих вопросов остаются открытыми.В то время как огромное количество исследований в области управления движениями человека дало все более точные объяснения компонентов подсистем, всесторонняя теория на уровне крупномасштабной динамики все еще не разработана.
Один из вопросов касается описания того, как моторная кора может кодировать информацию для управления высокой временной полосой пропускания схем спинного мозга. Несколько возможностей обсуждались на конференции Neural Control of Movement в 2013 году без окончательных результатов. Мы подчеркивали, что моторная кора передает закодированный кинематический план вместе с настройками жесткости, которые играют важную роль в формировании динамики мышечных веретен (Blum et al., 2020).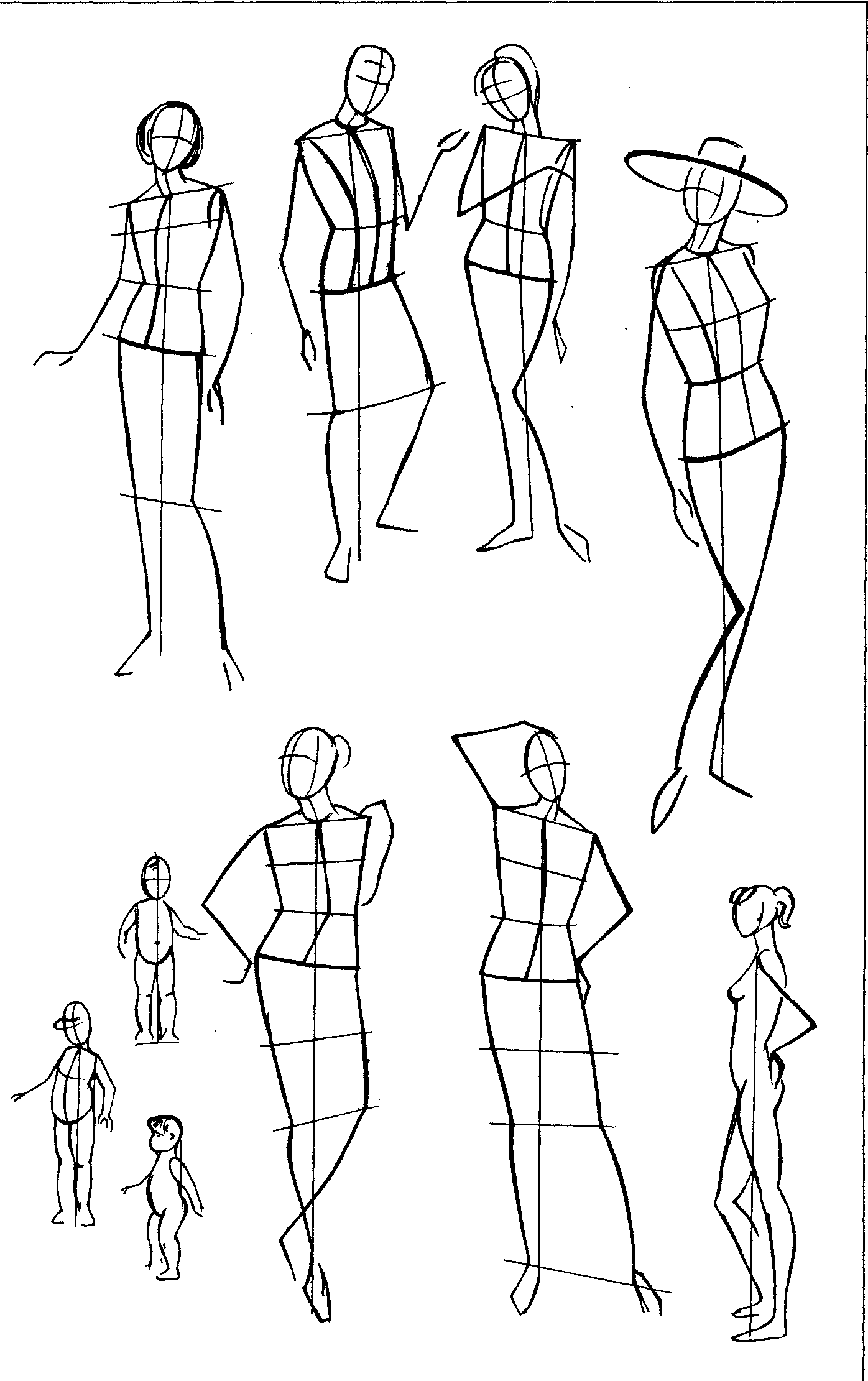
Исследования кинематики, закодированной с помощью временных базисных функций, показали, что кинематический план может быть закодирован для уменьшения необходимой полосы пропускания примерно в 10 3 Гц (Iyer and Ballard, 2011; Won et al., 2020). Совсем недавно для решения этой проблемы использовалось разреженное кодирование (Glanz et al., 2021), несмотря на ненужную осторожность в отношении его применимости к двигательным областям коры (Beyeler et al., 2019). Путь, который все еще открыт, мог бы состоять в том, чтобы наши большие наборы кинематических данных попытались смоделировать клеточные ответы в области коры головного мозга M1, чтобы увидеть, коррелируют ли они с данными Грациано.Можно было бы ожидать, что клетки могут иметь информационную интерпретацию, аналогичную той, которая используется для ориентированных сигналов в стриарной коре. Легкость, с которой система HDM может собирать двигательные данные, позволит легко исследовать стратегии двигательного кодирования, аналогичные зрительной области. Возможность сохранять сегменты движения избавила бы от необходимости использовать маловероятный вариант для генерации динамических кодов в коре нейронами. Это наблюдение находит поддержку в нейронных записях, которые показывают движения, генерируемые корой в дискретных фазах (Zimnik and Churchland, 2021), а робот Boston Dynamics Atlas также использует стратегию поиска (Feng et al., 2014).
Возможность сохранять сегменты движения избавила бы от необходимости использовать маловероятный вариант для генерации динамических кодов в коре нейронами. Это наблюдение находит поддержку в нейронных записях, которые показывают движения, генерируемые корой в дискретных фазах (Zimnik and Churchland, 2021), а робот Boston Dynamics Atlas также использует стратегию поиска (Feng et al., 2014).
Что касается концепции неуправляемого многообразия, важным моментом было использование ограниченных степеней свободы при вычислении динамики. Если ограничения близки к числу степеней свободы системы, восстановление крутящего момента может быстро стать численно нестабильным. Однако от 20 до 41 маркера в HDM обеспечивают достаточные ограничения для надежной интеграции динамических уравнений, позволяя естественной динамике системы правильно интерполировать движение.
Таким образом, метод имеет несколько преимуществ перед альтернативными методами:
1.Его можно легко реализовать в единой надежной структуре физического движка. Использование физического движка для нескольких задач позволяет использовать уникальную человеческую модель от начала до конца, вместо того, чтобы принуждать использовать соглашения, встроенные в коммерческий пакет.
Использование физического движка для нескольких задач позволяет использовать уникальную человеческую модель от начала до конца, вместо того, чтобы принуждать использовать соглашения, встроенные в коммерческий пакет.
2. Метод быстрый. Механизм моделирования разработан для повышения производительности, что позволяет анализировать движение, зафиксированное в режиме реального времени, и создавать интерактивные эксперименты со стимулами, зависящими от результатов обратной связи.
3.Программное обеспечение бесплатное. Свободно доступный код, такой как ODE, полезен, потому что он облегчает сравнение и сотрудничество в исследованиях. В-четвертых, метод обрабатывает множественные наземные контакты и данные с шумами, что создает трудности для соответствующих подходов. Кинематические петли не требуют специальной обработки. Метод устойчив даже к большим возмущениям, что делает данные динамически несогласованными.
4. Настраиваемые параметры (CFM), сформулированные в рамках физики, интуитивно понятны.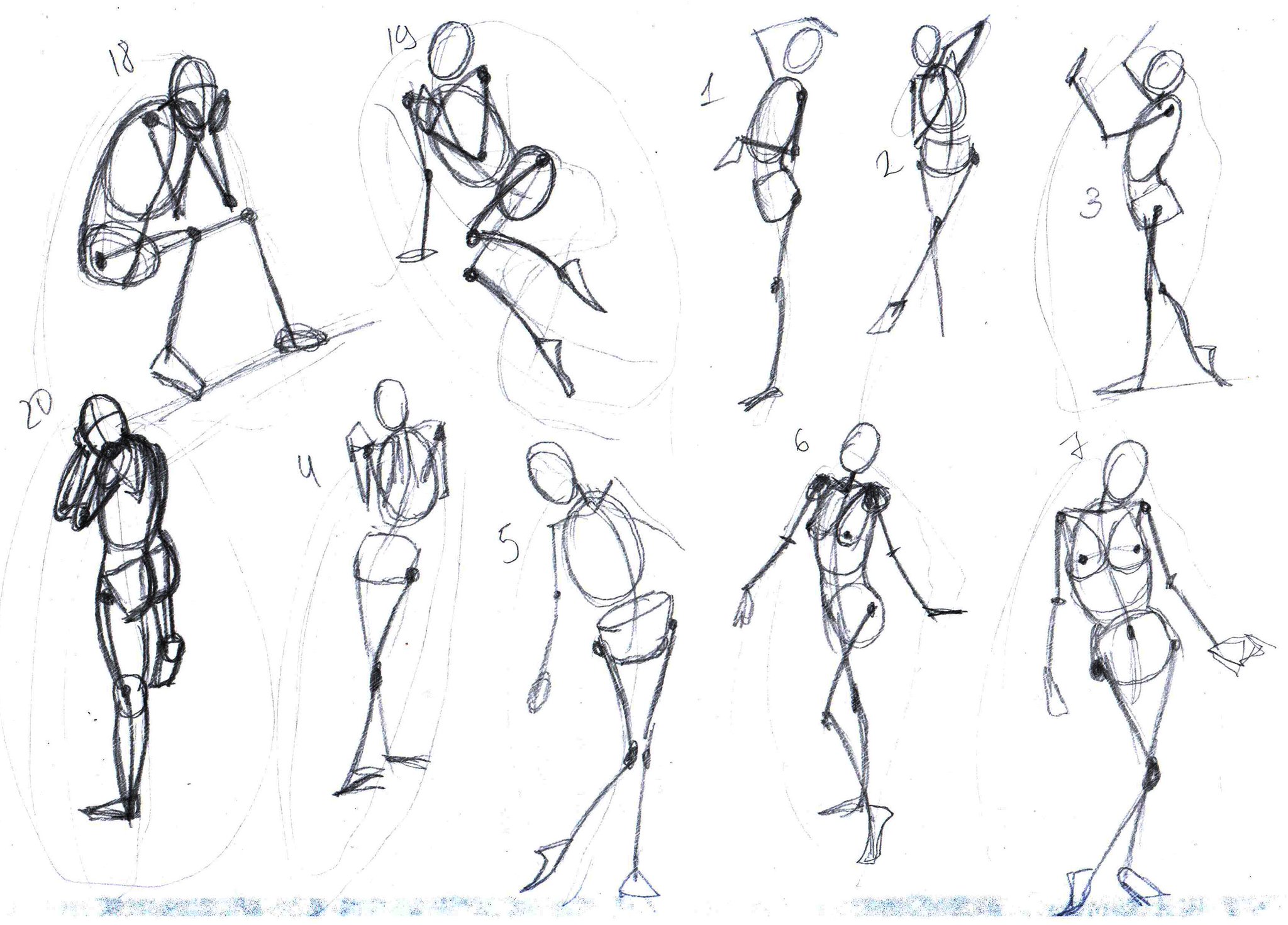 Гораздо проще указать важность ограничения по силе и массе, чем произвольное усиление и взвешивание.Мы проиллюстрируем эти преимущества, используя ODE для анализа и воспроизведения движения, записанного с помощью оптического захвата движения.
Гораздо проще указать важность ограничения по силе и массе, чем произвольное усиление и взвешивание.Мы проиллюстрируем эти преимущества, используя ODE для анализа и воспроизведения движения, записанного с помощью оптического захвата движения.
Есть несколько способов улучшить систему в будущем, и следующие два являются наиболее важными среди них. Одним из недостатков нашего метода расчета крутящего момента является то, что он нечувствителен к мышечной жесткости, которая одновременно пассивна и может активно модулировать (Atkeson and Schaal, 1997; Awrejcewicz et al., 2012). Повышение жесткости увеличивает общие энергетические затраты на движение, и это необходимо учитывать.Несколько улучшает эту проблему наблюдение, что испытуемые будут пытаться минимизировать энергетические затраты при выполнении большинства естественных задач и, таким образом, использовать естественную динамику всякий раз, когда они могут, снижая высокий уровень совместного сокращения (Carpenter, 1968; Shadmehr and Arbib, 1992; Sternad and Sternad, 2009). ). Однако повсеместное использование пружины в качестве ограничения означает возможность добавления пружин к степеням свободы сустава для моделирования жесткости. Они также могут иметь параметрические программируемые константы пружины для моделирования совместного сокращения мышц.Вторая функция, которую можно было бы добавить, — это улучшенная система удержания модели человека в вертикальном положении. Любой из трех человеческих источников этой необходимой информации — визуальный, вестибулярный и проприоцептивный — может быть кандидатом на это практическое ограничение. В настоящее время в HDM используется искусственная система вращательных моментов в центре тяжести, но их можно легко заменить более подходящими моментами в голеностопном суставе.
). Однако повсеместное использование пружины в качестве ограничения означает возможность добавления пружин к степеням свободы сустава для моделирования жесткости. Они также могут иметь параметрические программируемые константы пружины для моделирования совместного сокращения мышц.Вторая функция, которую можно было бы добавить, — это улучшенная система удержания модели человека в вертикальном положении. Любой из трех человеческих источников этой необходимой информации — визуальный, вестибулярный и проприоцептивный — может быть кандидатом на это практическое ограничение. В настоящее время в HDM используется искусственная система вращательных моментов в центре тяжести, но их можно легко заменить более подходящими моментами в голеностопном суставе.
Вклад авторов
JC создал исходный протокол динамической модели и провел некоторые первичные проверки.LL доработал модель, провел эксперименты и написал статью. DB разработал эксперименты и работал с LL над общим редактированием статьи и научной презентацией.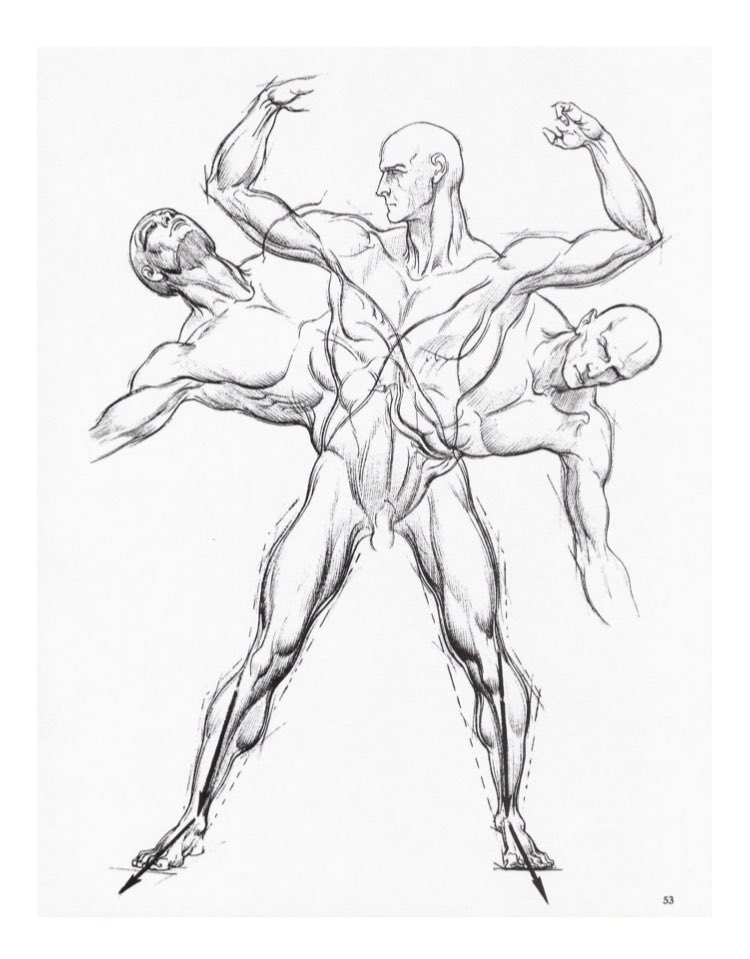
Финансирование
Это исследование было поддержано Национальным институтом здравоохранения EY05729.
Конфликт интересов
JC работает в компании Google Inc.
Остальные авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Примечание издателя
Все претензии, изложенные в этой статье, принадлежат исключительно авторам и не обязательно представляют претензии их дочерних организаций или издателя, редакторов и рецензентов. Любой продукт, который может быть оценен в этой статье, или претензии, которые могут быть сделаны его производителем, не гарантируются и не поддерживаются издателем.
Благодарности
Спасибо Джону Маттису и Лейфу Джонсону за полезные обсуждения.
Дополнительный материал
Дополнительный материал к этой статье можно найти в Интернете по адресу: https://www. frontiersin.org/articles/10.3389/fnbot.2021.723428/full#supplementary-material
frontiersin.org/articles/10.3389/fnbot.2021.723428/full#supplementary-material
Сноски
Каталожные номера
Аврейцевич Дж., Кудра Г. и Загродный Б. (2012). Нелинейность жесткости мышц. Теор. заявл. мех. Письмо . 2:053001. дои: 10.1063/2.1205301
Полнотекстовая перекрестная ссылка | Академия Google
Бадлер, Н.I., Филлипс, С.Б., и Уэббер, Б.Л. (1993). Моделирование людей: компьютерная графика, анимация и управление . Нью-Йорк, штат Нью-Йорк: Издательство Оксфордского университета. дои: 10.1093/oso/9780195073591.001.0001
Полнотекстовая перекрестная ссылка | Академия Google
Байрами, Х., и Муртури, И. (2017). Кинематическая модель семизвенного двуногого робота. ИЖМЕТ 8, 454–462.
Академия Google
Барбич, Дж., Сафонова, А., Пан, Дж.-Ю., Фалуцос, К., Ходжинс, Дж. К., и Поллард, Н.С. (2004). Разделение данных захвата движения на отдельные поведения, в Proceedings of Graphics Interface 2004 (Онтарио, Калифорния), 185–194. Доступно в Интернете по адресу: https://www.researchgate.net/publication/221474944_Segmenting_Motion_Capture_Data_into_Distinct_Behaviors.
Доступно в Интернете по адресу: https://www.researchgate.net/publication/221474944_Segmenting_Motion_Capture_Data_into_Distinct_Behaviors.
Академия Google
Бейелер, М., Раунд, Э. Л., Карлсон, К. Д., Датт, Н., и Кричмар, Дж. Л. (2019). Нейронные корреляты разреженного кодирования и уменьшения размерности. PLoS вычисл. Биол .15:e1006908. doi: 10.1371/journal.pcbi.1006908
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Блюм, К.П., Кэмпбелл, К.С., Хорслен, Б.С., Нарделли, П., Хаусли, С.Н., Коуп, Т.С., и соавт. (2020). Разнообразные и сложные свойства возбуждения афферентных импульсов мышечного веретена возникают из многоуровневой мышечной механики. Элиф 9:e55177. doi: 10.7554/eLife.55177
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Блюмель, М., Хупер, С.Л., Гушлбауэрк К., Уайт В.Е. и Бюшгес А. (2012). Определение всех параметров, необходимых для построения моделей мышц типа холмов, из экспериментов с отдельными мышцами. Биол. Кибер . 106, 543–558. doi: 10.1007/s00422-012-0531-5
Биол. Кибер . 106, 543–558. doi: 10.1007/s00422-012-0531-5
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Burdett, R.G., Skrinar, G.S., and Simon, S.R. (1983). Сравнение механической работы и расхода метаболической энергии при нормальной походке. Дж. Ортоп. Рез . 1, 63–72.doi: 10.1002/jor.1100010109
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Каллахан, Д.М., Умбергер, Б.Р., и Кент-Браун, Дж.А. (2013). Компьютерная модель генерации крутящего момента: нервные, сократительные, метаболические и скелетно-мышечные компоненты. PLoS ONE 8:e56013. doi: 10.1371/journal.pone.0056013
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Карпентер, М. (1968). Координация и регулирование движений .Балтимор, Мэриленд: Waverly Press doi: 10.1097/00005072-196804000-00011
Полнотекстовая перекрестная ссылка | Академия Google
Челиковский, С. , и Андерле, М. (2018). Стабильные походки трехзвенного плоского двуногого робота с двумя исполнительными механизмами на основе совмещенных виртуальных голономных ограничений и циклической неактивируемой переменной. IFAC-PapersOnLine 51, 378–385. doi: 10.1016/j.ifacol.2018.11.571
, и Андерле, М. (2018). Стабильные походки трехзвенного плоского двуногого робота с двумя исполнительными механизмами на основе совмещенных виртуальных голономных ограничений и циклической неактивируемой переменной. IFAC-PapersOnLine 51, 378–385. doi: 10.1016/j.ifacol.2018.11.571
Полнотекстовая перекрестная ссылка | Академия Google
Купер, Дж. Л., и Баллард, Д.(2012). Маркер, основанный на физике в реальном времени, следующий, Международная конференция по движению в играх (Берлин: Springer), 350–361. дои: 10.1007/978-3-642-34710-8_32
Полнотекстовая перекрестная ссылка | Академия Google
Де Агияр, Э., Теобальт, К., и Зайдель, Х.-П. (2006). Автоматическое изучение сочлененных скелетов по траекториям трехмерных маркеров, на Международном симпозиуме по визуальным вычислениям (Берлин: Springer), 485–494. дои: 10.1007/11919476_49
Полнотекстовая перекрестная ссылка | Академия Google
Делп, С.Л., Андерсон Ф.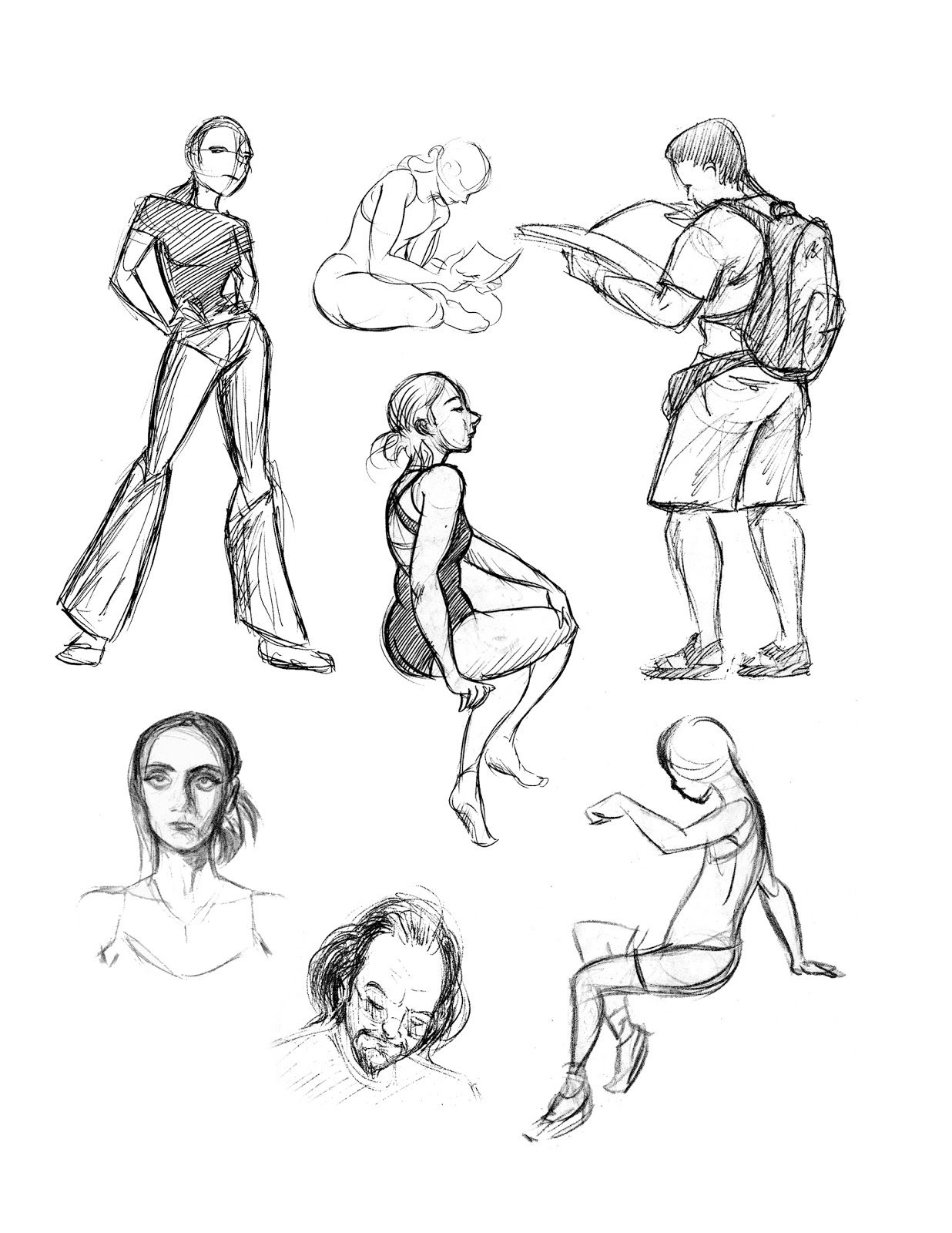 К., Арнольд А.С., Лоан П., Хабиб А., Джон С.Т. и соавт. (2007). Opensim: программное обеспечение с открытым исходным кодом для создания и анализа динамических симуляций движения. IEEE Trans. Биомед. Eng . 54, 1940–1950. doi: 10.1109/TBME.2007.4
К., Арнольд А.С., Лоан П., Хабиб А., Джон С.Т. и соавт. (2007). Opensim: программное обеспечение с открытым исходным кодом для создания и анализа динамических симуляций движения. IEEE Trans. Биомед. Eng . 54, 1940–1950. doi: 10.1109/TBME.2007.4
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Dembia, C.L., Bianco, N.A., Falisse, A., Hicks, JL, and Delp, S.L. (2020). Opensim moco: оптимальный контроль опорно-двигательного аппарата. Вычисление PLoS. Биол . 16:e1008493.doi: 10.1371/journal.pcbi.1008493
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Демиркан, Э., Сентис, Л., Де Сапио, В., и Хатиб, О. (2008). Реконструкция движения человека путем прямого управления траекториями маркеров, в Достижения в кинематике роботов: анализ и проектирование , под редакцией Дж. Ленарчича П. Венгера (Дордрехт: Springer), 263–272. дои: 10.1007/978-1-4020-8600-7_28
Полнотекстовая перекрестная ссылка | Академия Google
Дюрандау, Г. , Фарина, Д.и Сартори, М. (2017). Надежное моделирование опорно-двигательного аппарата в реальном времени на основе электромиограмм. IEEE Trans. Биомед. Eng . 65, 556–564. doi: 10.1109/TBME.2017.2704085
, Фарина, Д.и Сартори, М. (2017). Надежное моделирование опорно-двигательного аппарата в реальном времени на основе электромиограмм. IEEE Trans. Биомед. Eng . 65, 556–564. doi: 10.1109/TBME.2017.2704085
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Эрез Т., Тасса Ю. и Тодоров Э. (2015). Инструменты моделирования для робототехники на основе моделей: сравнение пули, Havok, Mujoco, Ode и Physx, Международная конференция IEEE по робототехнике и автоматизации (ICRA) (Сиэтл), 4397–4404, 2015 г.doi: 10.1109/ICRA.2015.7139807
Полнотекстовая перекрестная ссылка | Академия Google
Фор, Ф., Дебунн, Г., Кани-Гаскуэль, М.-П., и Мултон, Ф. (1997). Динамический анализ ходьбы человека, в Computer Animation and Simulation’97 (Будапешт: Springer), 53–65. дои: 10.1007/978-3-7091-6874-5_4
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Фэн, С., Уитмен, Э., Синджилефу, X., и Аткесон, К.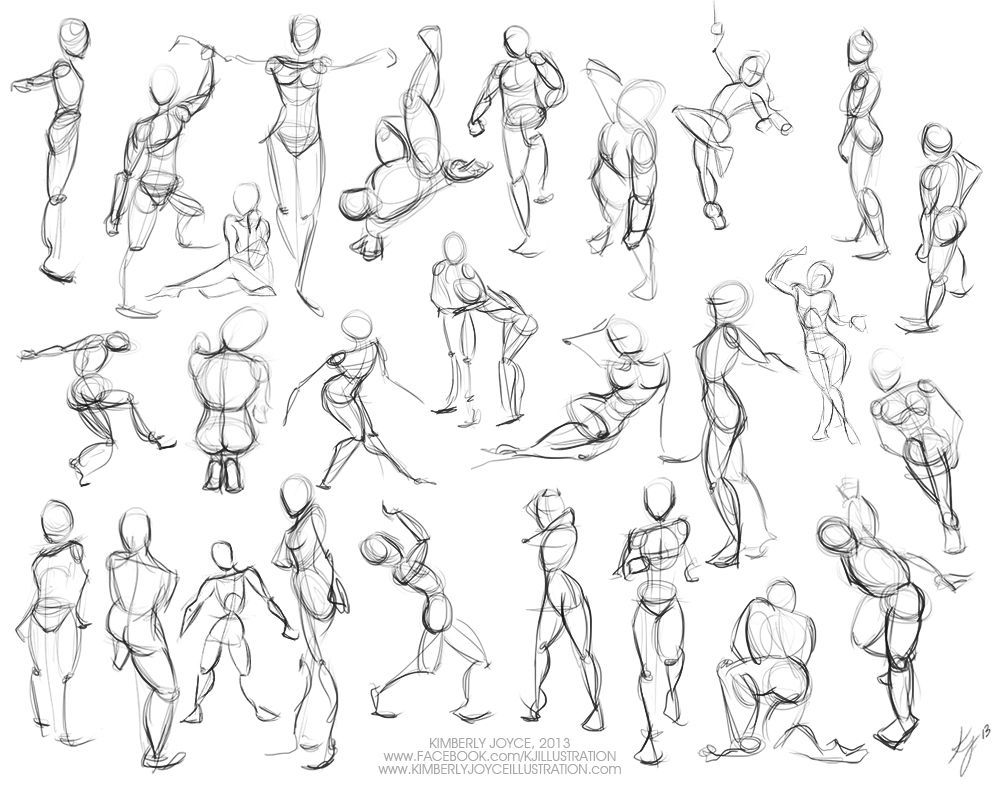 Г. (2014). Оптимизация полного управления телом робота Atlas, Международная конференция IEEE-RAS по роботам-гуманоидам, 2014 г., (Бостон, Массачусетс; Мадрид), 120–127.дои: 10.1109/ГУМАНОИДЫ.2014.7041347
Г. (2014). Оптимизация полного управления телом робота Atlas, Международная конференция IEEE-RAS по роботам-гуманоидам, 2014 г., (Бостон, Массачусетс; Мадрид), 120–127.дои: 10.1109/ГУМАНОИДЫ.2014.7041347
Полнотекстовая перекрестная ссылка | Академия Google
Гланц, Р. М., Дули, Дж. К., Соколофф, Г., и Блумберг, М. С. (2021). Сенсорное кодирование кинематики конечностей в моторной коре во время ключевого перехода развития. Дж Нейроски . 41, 6905–6918. doi: 10.1523/JNEUROSCI.0921-21.2021
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Гриззл, Дж. В., Шевальро, К., Эймс, А. Д., и Синнет, Р. В. (2010). Трехмерная двуногая роботизированная ходьба: модели, управление с обратной связью и открытые проблемы. Протокол МФБ . 43, 505–532. doi: 10.3182/20100901-3-IT-2016.00302
Полнотекстовая перекрестная ссылка | Академия Google
Айспеерт, А. Дж., Креспи, А., Рыцко, Д., и Кабельген, Ж.-М. (2007). От плавания до ходьбы с роботом-саламандрой, управляемым моделью спинного мозга. Наука 315, 1416–1420. doi: 10.1126/science.1138353
От плавания до ходьбы с роботом-саламандрой, управляемым моделью спинного мозга. Наука 315, 1416–1420. doi: 10.1126/science.1138353
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Айер Р. и Баллард Д. (2011). Представление движения мышц гуманоида, 2011 11-я Международная конференция IEEE-RAS по роботам-гуманоидам (Блед), 409–415.doi: 10.1109/Humanoids.2011.6100892
Полнотекстовая перекрестная ссылка | Академия Google
Хусаинов Р., Шимчик И., Афанасьев И. и Магид Э. (2016). 3D-моделирование движения двуногого робота с использованием шагающих примитивов в среде Simulink, на 12-й международной конференции Informatics in Control, Automation and Robotics, ICINCO 2015 Colmar (Cham: Springer), 287–304. дои: 10.1007/978-3-319-31898-1_16
Полнотекстовая перекрестная ссылка | Академия Google
Кирк, А.Г., О’Брайен, Дж. Ф., и Форсайт, Д. А. (2005). Оценка параметров скелета на основе данных оптического захвата движения, в 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05) , Vol.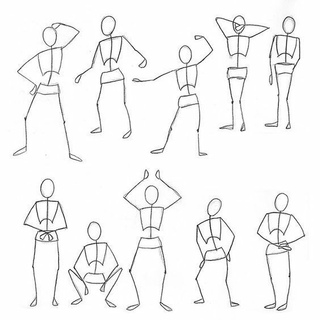 2 (Сан-Диего, Калифорния), 782–788. doi: 10.1109/CVPR.2005.326
2 (Сан-Диего, Калифорния), 782–788. doi: 10.1109/CVPR.2005.326
Полнотекстовая перекрестная ссылка | Академия Google
Крищенко А., Ткачев С. и Фетисов Д. (2007). Планарное управление ходьбой пятизвенного двуногого робота. Вычисл. Мат. Модель . 18, 176–191.doi: 10.1007/s10598-007-0018-8
Полнотекстовая перекрестная ссылка | Академия Google
Ли, С., Парк, М., Ли, К., и Ли, Дж. (2019). Масштабируемая мышечная симуляция и управление человеком. ACM Trans. График . 38, 1–13. дои: 10.1145/3306346.3322972
Полнотекстовая перекрестная ссылка | Академия Google
Ли, Т.-Т. (1988). Планирование траектории и управление трехзвенным двуногим роботом, Международная конференция IEEE по робототехнике и автоматизации , 820–823. дои: 10.1109/РОБОТ.1988.12161
Полнотекстовая перекрестная ссылка | Академия Google
Лю Г., Чжан Дж., Ван В. и Макмиллан Л. (2006). Оценка движения человека по уменьшенному набору маркеров, Proceedings of the 2006 Symposium on Interactive 3D Graphics and Games , 35–42. дои: 10.1145/1111411.1111418
дои: 10.1145/1111411.1111418
Полнотекстовая перекрестная ссылка | Академия Google
Лю, Л., Джонсон, Л., Зохар, О., и Баллард, Д. Х. (2019). Люди используют аналогичные последовательности поз в задаче отслеживания всего тела. Наука 19, 860–871. doi: 10.1016/j.isci.2019.08.041
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Мусави, П. Н., и Багери, А. (2007). Математическое моделирование семизвенного двуногого робота на различных поверхностях с учетом zmp. Заяв. Мат. Модель . 31, 18–37. doi: 10.1016/j.apm.2006.06.018
Полнотекстовая перекрестная ссылка | Академия Google
Му, Х., и Ву, К. (2003). Синтез полного цикла сагиттальной походки пятизвенного двуногого робота. Robotica 21, 581–587. дои: 10.1017/S0263574702004903
Полнотекстовая перекрестная ссылка | Академия Google
Му, Х., и Ву, К. (2004). Синтез сагиттальной походки пятизвенного двуногого робота, в Proceedings of the American Control Conference 2004 , Vol. 5, Бостон, 4004–4009.
5, Бостон, 4004–4009.
Академия Google
Мейбридж, Э. (1887 г.). Передвижение животных . Оксфорд: Да Капо Пресс.
Академия Google
Ортега, Дж. Д., Фельман, Л.А. и Фарли, CT (2008). Влияние старения и размахивания руками на метаболические затраты на устойчивость при ходьбе человека. Дж. Биомех . Оксфорд, 41, 3303–3308. doi: 10.1016/j.jbiomech.2008.06.039
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Раджагопал, А., Дембиа, К.Л., ДеМерс, М.С., Делп, Д.Д., Хикс, Дж.Л., и Делп, С.Л. (2016). Скелетно-мышечная модель всего тела для имитации походки человека с помощью мышц. IEEE Trans. Биомед. Eng . 63, 2068–2079.doi: 10.1109/TBME.2016.2586891
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Реми, К.Д., и Телен, Д.Г. (2009). Оптимальная оценка динамически согласованной кинематики и кинетики для прямого динамического моделирования походки. Дж. Биомех. Eng . 131:031005. дои: 10.1115/1.3005148
Биомех. Eng . 131:031005. дои: 10.1115/1.3005148
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Шольц, Дж. П., и Шенер, Г. (1999). Концепция неуправляемого многообразия: определение управляющих переменных для функциональной задачи. Экспл. Мозг Res . 126, 289–306. дои: 10.1007/s002210050738
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Шульман, Дж., Хо, Дж., Ли, К., и Аббил, П. (2016). Обучение на демонстрациях с использованием нежесткой регистрации, в Robotics Research , редакторы М. Инаба М. и П. Корк (Cham: Springer), 339–354. дои: 10.1007/978-3-319-28872-7_20
Полнотекстовая перекрестная ссылка | Академия Google
Сентис Л., Парк Дж. и Хатиб О.(2010). Соответствующее управление многоконтактным поведением и поведением центра масс гуманоидных роботов. IEEE Trans. Робот . 26, 483–501. doi: 10.1109/TRO.2010.2043757
Полнотекстовая перекрестная ссылка | Академия Google
Сет А. , Шерман М., Рейнболт Дж. А. и Делп С. Л. (2011). Opensim: структура скелетно-мышечного моделирования и моделирования для in silico исследований и обмена. Проц. Ютам 2, 212–232. doi: 10.1016/j.piutam.2011.04.021
, Шерман М., Рейнболт Дж. А. и Делп С. Л. (2011). Opensim: структура скелетно-мышечного моделирования и моделирования для in silico исследований и обмена. Проц. Ютам 2, 212–232. doi: 10.1016/j.piutam.2011.04.021
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Шадмер, Р.и Арбиб, Массачусетс (1992). Математический анализ жесткостно-силовых характеристик мышц при управлении одной суставной системой. Биол. Кибер . 66, 463–477. дои: 10.1007/BF00204111
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Тинг, Л. Х. (2007). Уменьшение размеров в сенсомоторных системах: основа для понимания мышечной координации осанки. Прог. Мозг Res . 165, 299–321. doi: 10.1016/S0079-6123(06)65019-X
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Турнье, М., Ву, X., Корти, Н., Арно, Э., и Ревере, Л. (2009). Сжатие движения с использованием основного геодезического анализа, в Computer Graphics Forum , Vol. 28 (Уайли), 355–364. doi: 10.1111/j.1467-8659.2009.01375.x
28 (Уайли), 355–364. doi: 10.1111/j.1467-8659.2009.01375.x
Полнотекстовая перекрестная ссылка | Академия Google
ван дер Коой, Х., ван Ассельдонк, Э., и ван дер Хельм, Ф. К. (2005). Сравнение различных методов выявления и количественной оценки контроля баланса. J. Neurosci. Методы 145, 175–203. doi: 10.1016/j.jneumeth.2005.01.003
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Вон, Дж., Гопинат, Д., и Ходжинс, Дж. (2020). Масштабируемый подход к управлению разнообразным поведением физически смоделированных персонажей. ACM Trans. График . 39:33. дои: 10.1145/3386569.3392381
Полнотекстовая перекрестная ссылка | Академия Google
Зордан, В.Б., и Ходжинс, Дж.К. (2002). Моделирование на основе захвата движения, которое поражает и реагирует, в материалах Proceedings of the 2002 ACM SIGGRAPH / Eurographics Symposium on Computer Animation (Нью-Йорк, штат Нью-Йорк), 89–96.дои: 10.1145/545261. 545276
545276
Полнотекстовая перекрестная ссылка | Академия Google
Зордан, В.Б., и Ван Дер Хорст, Северная Каролина (2003). Сопоставление данных захвата оптического движения со скелетным движением с использованием физической модели, в материалах Proceedings of the 2003 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (Гослар), 245–250. Доступно в Интернете по адресу: https://dl.acm.org/doi/proceedings/10.5555/846276
.Академия Google
Анатомические движения Спортивная научная степень Физическое воспитание
Объективы
- Для определения ряда анатомических движений и демонстрации этих движений с соответствующими иллюстрациями с помощью программного обеспечения Quintic.
- Определите специфические спортивные навыки, в которых происходят определенные анатомические движения, и определите роль, которую эти движения играют в успешном выполнении спортивного навыка.
Методы
- Видеозапись была снята со скоростью 50 кадров в секунду с помощью камеры Panasonic 3CCD с изображением субъекта, выполняющего анатомические движения.
 Затем видео были экспортированы в программное обеспечение Quintic Biomechanics 9.03v17.
Затем видео были экспортированы в программное обеспечение Quintic Biomechanics 9.03v17. - Функции смешивания, форм и захвата неподвижных изображений в Quintic использовались для иллюстрации различных анатомических движений из отснятого материала.
- Затем были сняты видеозаписи различных спортивных навыков и открыты в программе Quintic, где они были проанализированы, чтобы определить конкретные движения суставов, из которых состоит навык.
- Видеозапись была снята со скоростью 50 кадров в секунду с помощью камеры Panasonic 3CCD с изображением субъекта, выполняющего анатомические движения.
 Затем видео были экспортированы в программное обеспечение Quintic Biomechanics 9.03v17.
Затем видео были экспортированы в программное обеспечение Quintic Biomechanics 9.03v17.Функции используемого программного обеспечения Quintic:
- Функция одной камеры
- Захват неподвижного изображения
- Модуль последовательности фотографий
- Инструменты для придания формы
- Функция смешивания
- Функция скорости воспроизведения
Результаты
Примечание : Все описываемые движения предполагают, что тело начинается с анатомического положения, если не указано иное, как описано во введении.
1. Сгибание
Сгибание — это сгибательное движение, которое приводит к уменьшению угла в суставе за счет сближения костей. Обычно это происходит в сагиттальной плоскости. В таблице ниже представлены некоторые суставы, в которых может происходить сгибание, и пример этого движения;
Сгибание | |
Соединение | Пример |
Плечо | Подъем рук вверх и перед собой. |
Колено | Движение предплечья к плечу путем сгибания локтя для уменьшения его угла |
Позвоночник | Перемещение подбородка к груди. |
Бедро | Движение бедренной кости к тазу/приведение колена к груди |
Колено | Перемещение пятки к ягодицам. |
На рисунке 3 ниже показано сгибание лучезапястного сустава.Сгибание лучезапястного сустава является важным движением во многих спортивных навыках, особенно в играх с ракеткой, поскольку оно может обеспечить стабильность и мощность при выступлении. В последующей фазе штрафного броска в баскетболе очевидно сгибание запястья. Цель этого движения, которое технически известно как щелчок запястьем (показано на рисунке 4 ниже), состоит в том, чтобы создать усиленное вращение мяча, что, в свою очередь, добавит подъемной силы к траектории (полета мяча), это может увеличить скорость выпуска мяча. мяч и улучшить общую производительность, что делает его важным аспектом выполнения штрафного броска в баскетболе.
Чудо человеческого движения
Наблюдать за движением балерины — значит наблюдать, пожалуй, вершину координации, ощутить точную и изысканную элегантность. А теперь представьте художественной гимнастки, которая должна не только двигаться с четкой грацией танцора, но и одновременно манипулировать мячом, обручем или лентой с предельным контролем.
«Она расширяет свои движения к объекту. Она едина с объектом», — сказала Дагмар Стернад, профессор биологии, электротехники, вычислительной техники и физики Северо-Восточного университета.
Во вторник днем Стернад получила 50-ю ежегодную премию преподавателя Университета Роберта Д. Кляйна и прочитала свою университетскую лекцию под названием «Чудо человеческого движения: как мозг управляет телом». Она показала изображения гимнастов и танцоров, чтобы подчеркнуть их невероятный уровень физического контроля.
С другой стороны, по ее словам, есть люди, страдающие расстройствами и заболеваниями, такими как болезнь Паркинсона, церебральный паралич или инсульт. Повреждение нервной системы головного мозга лишает этих пациентов контроля над своими конечностями и движениями.«У нас нет лекарства, — сказал Стернад. «У нас есть способы облегчить симптомы, но нет лекарства».
Повреждение нервной системы головного мозга лишает этих пациентов контроля над своими конечностями и движениями.«У нас нет лекарства, — сказал Стернад. «У нас есть способы облегчить симптомы, но нет лекарства».
Премия преподавателя Университета Роберта Д. Кляйна, учрежденная в 1964 году по рекомендации Сената факультета, присуждается преподавателю, внесшему выдающийся вклад в свою собственную область обучения. В 1979 году он был переименован в честь покойного Клейна, уважаемого профессора математики и лидера факультетского сената.
Стивен В. Директор, проректор и старший вице-президент по академическим вопросам вручил Стернарду награду.Директор охарактеризовал ее как «блестящего педагога, замечательного оратора, лидера и страстного исследователя».
Стернад, руководитель Лаборатории действий в Северо-Восточном университете, является всемирно известным авторитетом в области экспериментальной и вычислительной двигательной нейронауки. Ее разнообразная академическая карьера охватила дисциплины движения, английской лингвистики и литературы, экспериментальной психологии, неврологии и кинезиологии. Ее исследования двигательного контроля и обучения человека пролили свет на неврологические дефекты у пациентов с болезнью Паркинсона, детей с дистонией и людей, перенесших инсульт.
Ее исследования двигательного контроля и обучения человека пролили свет на неврологические дефекты у пациентов с болезнью Паркинсона, детей с дистонией и людей, перенесших инсульт.
В своей лекции Стернад подробно рассказала о сложности человеческого мозга, состоящего из от 10 до 100 миллиардов нейронов, каждый из которых образует тысячи соединений со всеми остальными. «Это непостижимая сеть со 100 триллионами подключений», — пояснила она. Как эта бесконечно сложная структура превращает информацию в физические движения? И как мы можем использовать этот процесс, чтобы помочь пациентам, которые не могут контролировать свои движения?
В качестве первого шага к ответу на эти вопросы, разработке соответствующих вмешательств для пациентов и пониманию того, как балерины и гимнасты достигают такого замечательного контроля над своими движениями, команда Стернада работает в обратном направлении.Вместо того, чтобы начинать с нейронов, которые вызывают движение, они начинают с поведения.
«Мы начинаем с того, что выбираем интересную задачу», — сказал Стернад. Это может быть чашка кофе или подпрыгивание мяча. Затем они работают, чтобы понять физику задачи, чтобы отобразить ее в виртуальной среде, где они могут экспериментально проверить производительность человека. Основываясь на том, что они узнают, они могут разрабатывать вмешательства, чтобы помочь людям изменить свои движения.
«Маловероятно, чтобы люди контролировали свои движения, изучая точные мышцы, которые контролируют ту или иную задачу», — объяснил Стернад.Вместо этого мы собираем внешнюю информацию об этом, например отзывы о производительности в игре. «Затем мы находим решения задачи, которые делают нашу изменчивость менее вредной».
Ее исследование показало, что, хотя мы можем не понимать математические расчеты, необходимые для решения задачи, мы учимся и реагируем на ее физику, чем больше практикуемся. Например, в настольных кеглях, в которых игрок должен умело запустить привязанный мяч, чтобы сбить маленькую кеглю, на эллиптической траектории мяча есть области, где его освобождение с большей вероятностью приведет к успеху. «Хотя мы можем этого не знать, когда мы играем в игру снова и снова, мы начинаем выпускать мяч как раз в этом наилучшем месте», — сказала она.
«Хотя мы можем этого не знать, когда мы играем в игру снова и снова, мы начинаем выпускать мяч как раз в этом наилучшем месте», — сказала она.
Ее работа показала, что люди с болезнью Паркинсона контролируют свою траекторию, но не время выпуска мяча. «Мы можем [использовать] это понимание, чтобы сфокусировать наши действия», — объяснила она.
Тем не менее, даже самые хорошо подготовленные и опытные спортсмены могут сломаться под давлением. Чтобы смоделировать ощущение угрозы соперничества, которое может присутствовать, скажем, во время Олимпийских игр или Мировой серии, Стернад в партнерстве с профессором психологии Северо-восточного университета Стивеном Харкинсом разработал эксперименты, в которых участники должны играть в игру с дополнительной информацией или без нее. об их вероятности успеха.«Мы говорим им, что существуют гендерные различия», — сказала она. Действительно, вызов угрозы приводит к ухудшению тонкой связи между мозгом и телом. — Значит, разум имеет значение, — сказал Стернад.
Использование данных переписи миграции для аппроксимации моделей перемещения людей во временном масштабе
Abstract
Передвижение людей играет ключевую роль в экономике и развитии, предоставлении услуг и распространении инфекционных заболеваний.Однако он по-прежнему плохо поддается количественной оценке отчасти из-за отсутствия надежных данных, особенно по странам с низким уровнем дохода. Наиболее широко доступными являются данные о миграции из переписей населения, которые предоставляют ценную информацию об относительно длительных перемещениях по странам, но не фиксируют краткосрочные модели, поездки менее года, которые составляют основную часть перемещения людей. Однако данные о миграции, полученные в результате переписи, могут предоставить ценные косвенные данные для краткосрочных перемещений, поскольку значительная миграция между регионами может указывать на хорошо связанные места, демонстрирующие высокий уровень перемещения в более мелких временных масштабах, но это никогда не изучалось подробно. Здесь обширный набор данных об использовании мобильных телефонов для Кении был обработан для извлечения перемещений между округами в 2009 г. в недельных, месячных и годовых временных масштабах и сравнения с данными об изменении места жительства из национальной переписи, проведенной за тот же период времени. Мы обнаружили, что относительная упорядоченность по округам Кении для входящих, исходящих и перемещений между округами показывает сильную корреляцию. Более того, распределения длительности поездок из обоих источников данных схожи, а модель пространственного взаимодействия, подогнанная к данным, выявляет отношения различных параметров в диапазоне масштабов времени движения.Между данными переписи о миграции и моделями перемещений в точном временном масштабе существуют значительные взаимосвязи, и результаты показывают, что данные переписи можно использовать для аппроксимации определенных характеристик моделей перемещений в нескольких временных масштабах, расширяя полезность данных о миграции, полученных в результате переписи.
Здесь обширный набор данных об использовании мобильных телефонов для Кении был обработан для извлечения перемещений между округами в 2009 г. в недельных, месячных и годовых временных масштабах и сравнения с данными об изменении места жительства из национальной переписи, проведенной за тот же период времени. Мы обнаружили, что относительная упорядоченность по округам Кении для входящих, исходящих и перемещений между округами показывает сильную корреляцию. Более того, распределения длительности поездок из обоих источников данных схожи, а модель пространственного взаимодействия, подогнанная к данным, выявляет отношения различных параметров в диапазоне масштабов времени движения.Между данными переписи о миграции и моделями перемещений в точном временном масштабе существуют значительные взаимосвязи, и результаты показывают, что данные переписи можно использовать для аппроксимации определенных характеристик моделей перемещений в нескольких временных масштабах, расширяя полезность данных о миграции, полученных в результате переписи.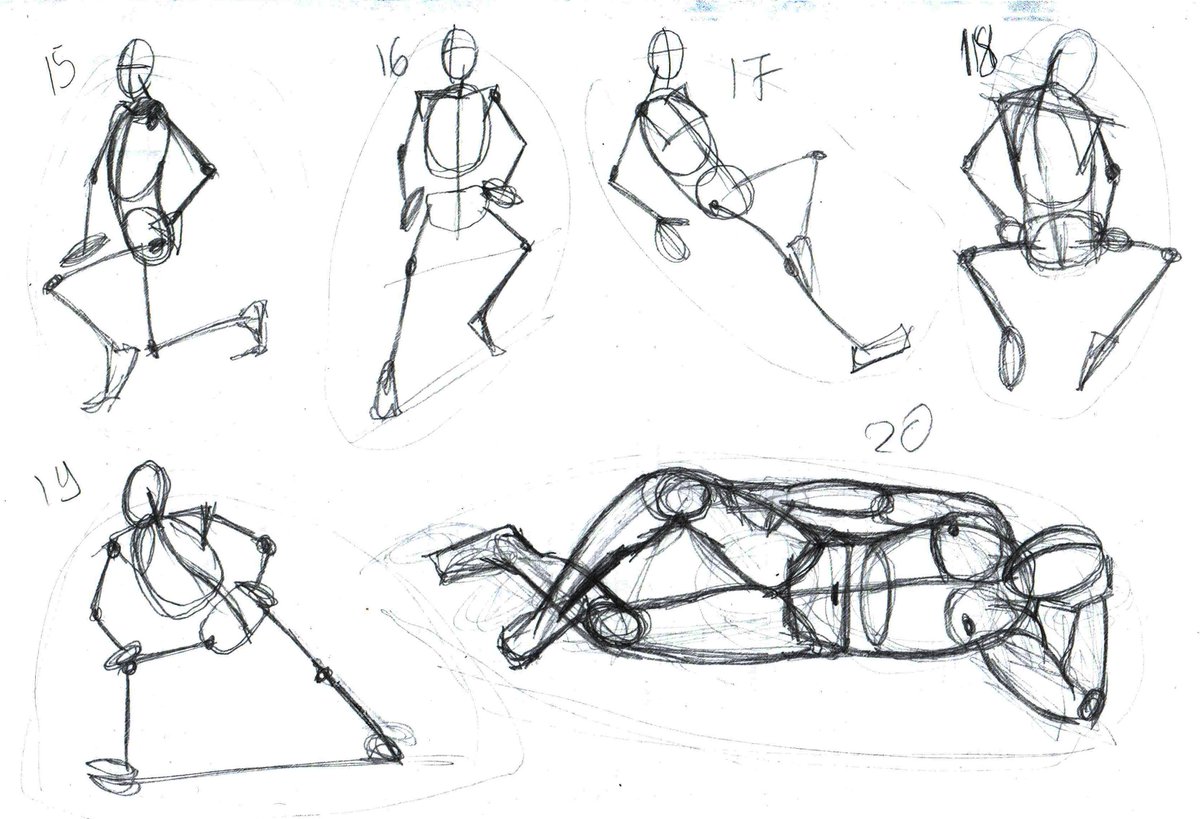
Образец цитирования: Wesolowski A, Buckee CO, Pindolia DK, Eagle N, Smith DL, Garcia AJ, et al. (2013) Использование данных переписи миграции для аппроксимации моделей перемещения людей во временных масштабах.ПЛОС ОДИН 8(1): е52971. https://doi.org/10.1371/journal.pone.0052971
Редактор: Джон П. Харт, Государственный музей Нью-Йорка, Соединенные Штаты Америки
Поступила в редакцию: 5 сентября 2012 г.; Принято: 26 ноября 2012 г.; Опубликовано: 9 января 2013 г.
Авторское право: © 2013 Wesolowski et al. Это статья с открытым доступом, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Финансирование: APW поддерживается стипендией для выпускников Национального научного фонда (#0750271). COB был поддержан программой «Модели изучения возбудителей инфекционных заболеваний» (соглашение о сотрудничестве 1U54GM088558). Содержание является исключительной ответственностью авторов и не обязательно отражает официальную точку зрения Национального института общих медицинских наук или Национального института здравоохранения (NIH). DLS, AJT и DKP поддерживаются грантом Фонда Билла и Мелинды Гейтс (№ 49446), который поддерживал DKP, а AJT поддерживается дополнительным грантом (№ 1032350).DLS и AJT также признают финансовую поддержку со стороны NIH/NIAID (U19AI089674) и программы RAPIDD Управления науки и технологий Министерства внутренней безопасности и Международного центра Фогарти, Национальных институтов здравоохранения (http://www.fic.nih). .gov). AJG была частично поддержана Национальным научным фондом в рамках гранта № 0801544 в рамках программы количественной пространственной экологии, эволюции и окружающей среды Университета Флориды. Спонсоры не принимали участия в разработке исследования, сборе и анализе данных, принятии решения о публикации или подготовке рукописи.
COB был поддержан программой «Модели изучения возбудителей инфекционных заболеваний» (соглашение о сотрудничестве 1U54GM088558). Содержание является исключительной ответственностью авторов и не обязательно отражает официальную точку зрения Национального института общих медицинских наук или Национального института здравоохранения (NIH). DLS, AJT и DKP поддерживаются грантом Фонда Билла и Мелинды Гейтс (№ 49446), который поддерживал DKP, а AJT поддерживается дополнительным грантом (№ 1032350).DLS и AJT также признают финансовую поддержку со стороны NIH/NIAID (U19AI089674) и программы RAPIDD Управления науки и технологий Министерства внутренней безопасности и Международного центра Фогарти, Национальных институтов здравоохранения (http://www.fic.nih). .gov). AJG была частично поддержана Национальным научным фондом в рамках гранта № 0801544 в рамках программы количественной пространственной экологии, эволюции и окружающей среды Университета Флориды. Спонсоры не принимали участия в разработке исследования, сборе и анализе данных, принятии решения о публикации или подготовке рукописи.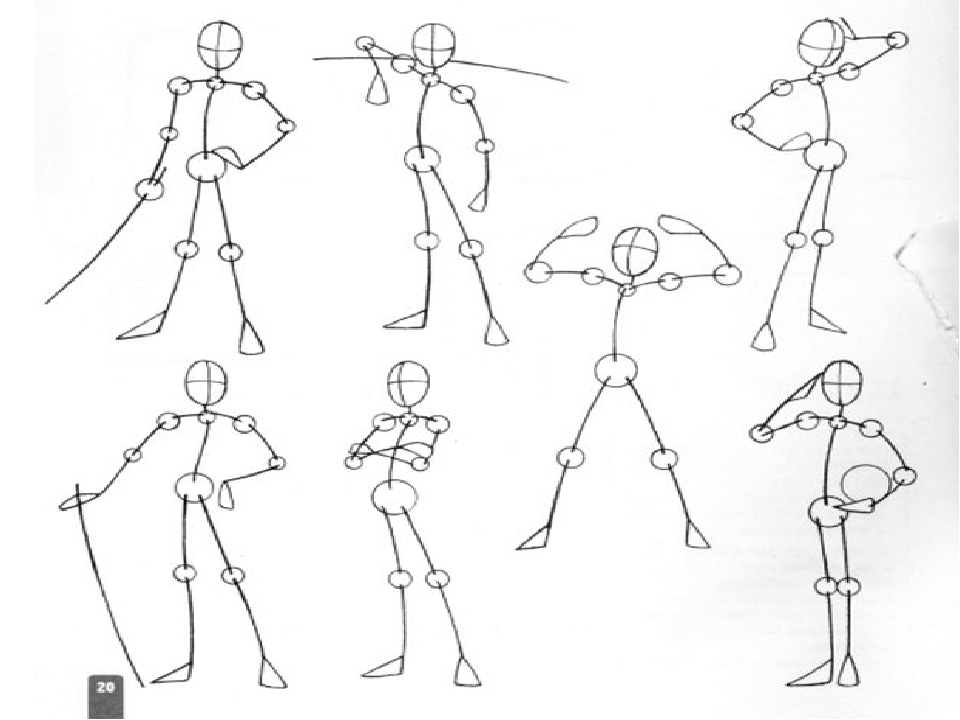
Конкурирующие интересы: Авторы заявили об отсутствии конкурирующих интересов.
Введение
Передвижение людей влияет на важные процессы в области общественного здравоохранения, экономики и экологии. Например, развитие эпидемий и поддержание эндемических заболеваний тесно связаны с моделями передвижения людей [1]–[7]. Экономическое развитие может быть обусловлено доступом к рынкам и эффективным транспортным средствам для повышения мобильности рабочей силы и потока товаров [8]–[9].Более того, возрастающая мобильность людей привела к расселению экзотических видов по всему миру, что нанесло значительный экономический ущерб в случае видов-вредителей [10]–[11]. Политика планирования, смягчения последствий и развития может быть лучше информирована за счет включения данных о перемещении людей.
Однако общеизвестно, что измерение моделей передвижения людей является сложной задачей, а надежных наборов данных немного, особенно в регионах с низким уровнем дохода. Данные о перемещении часто собираются для конкретных целей, которые ограничивают возможности обобщения.Например, данные о трафике часто собираются для конкретных целей развития, таких как строительство новой дороги [8], в то время как обследования поездок на работу различаются по объему и размеру выборки [5]–[6], [12]–[14]. , но в основном ограничиваются странами с высоким уровнем дохода и теми, кто совершает определенные рабочие поездки. Вопросы об истории путешествий из опросов домохозяйств предоставляют очень подробные данные о моделях передвижения человека, но редко опрашивают более сотни человек из ограниченной группы и часто страдают от предвзятости припоминания [15]–[17].
Данные о перемещении часто собираются для конкретных целей, которые ограничивают возможности обобщения.Например, данные о трафике часто собираются для конкретных целей развития, таких как строительство новой дороги [8], в то время как обследования поездок на работу различаются по объему и размеру выборки [5]–[6], [12]–[14]. , но в основном ограничиваются странами с высоким уровнем дохода и теми, кто совершает определенные рабочие поездки. Вопросы об истории путешествий из опросов домохозяйств предоставляют очень подробные данные о моделях передвижения человека, но редко опрашивают более сотни человек из ограниченной группы и часто страдают от предвзятости припоминания [15]–[17].
Наиболее широко используемая форма данных о перемещениях людей на больших территориях генерируется национальными переписями населения и жилищного фонда, доступными почти для всех стран мира. Стандартный вопрос переписи населения спрашивает респондентов об их месте жительства годом ранее. Ответы на этот вопрос часто используются для получения оценок темпов миграции между странами или между странами [18]–[20]. Остается неясным, в какой степени эти данные о миграции отражают и связаны с более частыми перемещениями в течение более коротких периодов времени, например, поездками продолжительностью в неделю или несколько месяцев, которые имеют значение для таких факторов, как распространение болезни и экономическое развитие.Однако долгосрочные перемещения, отраженные в данных переписи, вполне могут служить ценными показателями краткосрочных перемещений, а прочные миграционные связи между регионами могут свидетельствовать о хорошо связанных местах, которые также демонстрируют высокий уровень перемещений в более короткие временные масштабы, поскольку люди из определенного население может с большей вероятностью мигрировать в места, которые часто посещают они сами и другие представители того же населения. Хотя это предположение часто высказывается, оно никогда не подтверждалось.
Остается неясным, в какой степени эти данные о миграции отражают и связаны с более частыми перемещениями в течение более коротких периодов времени, например, поездками продолжительностью в неделю или несколько месяцев, которые имеют значение для таких факторов, как распространение болезни и экономическое развитие.Однако долгосрочные перемещения, отраженные в данных переписи, вполне могут служить ценными показателями краткосрочных перемещений, а прочные миграционные связи между регионами могут свидетельствовать о хорошо связанных местах, которые также демонстрируют высокий уровень перемещений в более короткие временные масштабы, поскольку люди из определенного население может с большей вероятностью мигрировать в места, которые часто посещают они сами и другие представители того же населения. Хотя это предположение часто высказывается, оно никогда не подтверждалось.
Недавно было показано, что данные об использовании мобильных телефонов являются ценным источником информации о краткосрочных частых перемещениях.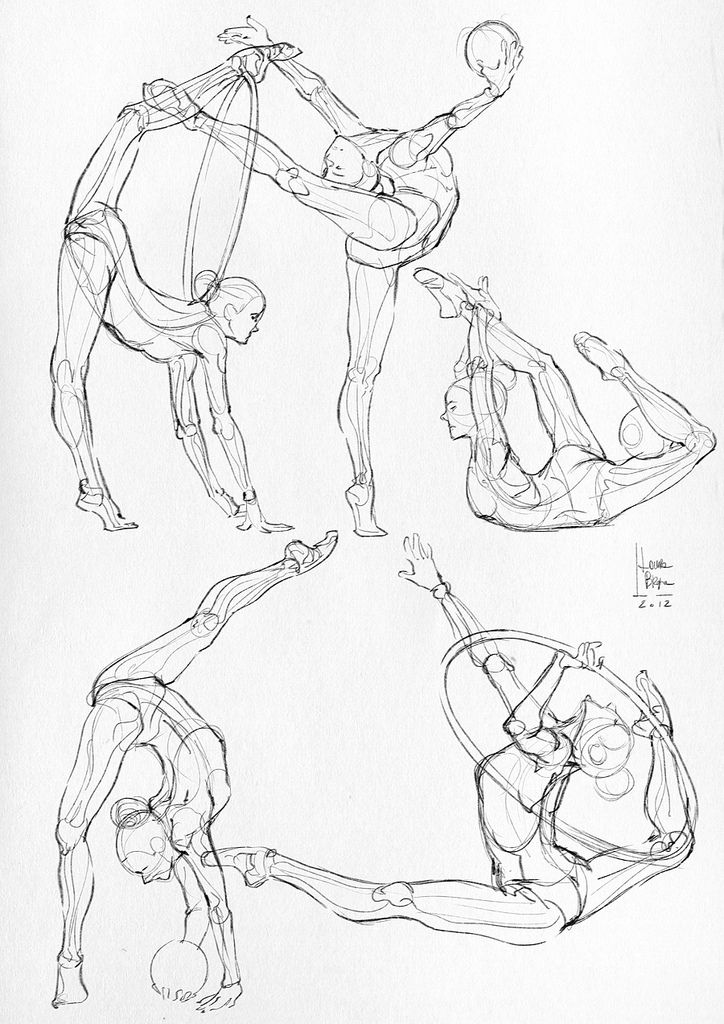 Записи данных о звонках (CDR) предоставляют информацию о местонахождении пользователя в момент совершения им звонка или текстового сообщения, предоставляя изображение с высоким временным и пространственным разрешением больших выборок отдельных перемещений за периоды времени в год или более. показано, что они являются ценным представлением моделей движения человека во временном и пространственном масштабе, недостижимым с другими типами данных [7], [21]–[27]. Однако такие наборы данных не являются широко доступными, их трудно получить, и они очень конфиденциальны, что затрудняет их обмен и анализ для большинства стран и периодов времени.Эти данные можно использовать для изучения взаимосвязей между краткосрочными перемещениями, регистрируемыми мобильными телефонами, и более долгосрочными перемещениями, фиксируемыми с помощью свободно доступных и широко доступных данных переписи, и потенциально расширять полезность данных переписи о миграции, позволяя разрабатывать лучшее понимание многомасштабных моделей движения человека на больших территориях.
Записи данных о звонках (CDR) предоставляют информацию о местонахождении пользователя в момент совершения им звонка или текстового сообщения, предоставляя изображение с высоким временным и пространственным разрешением больших выборок отдельных перемещений за периоды времени в год или более. показано, что они являются ценным представлением моделей движения человека во временном и пространственном масштабе, недостижимым с другими типами данных [7], [21]–[27]. Однако такие наборы данных не являются широко доступными, их трудно получить, и они очень конфиденциальны, что затрудняет их обмен и анализ для большинства стран и периодов времени.Эти данные можно использовать для изучения взаимосвязей между краткосрочными перемещениями, регистрируемыми мобильными телефонами, и более долгосрочными перемещениями, фиксируемыми с помощью свободно доступных и широко доступных данных переписи, и потенциально расширять полезность данных переписи о миграции, позволяя разрабатывать лучшее понимание многомасштабных моделей движения человека на больших территориях.
Здесь мы используем всеобъемлющий набор данных об использовании мобильных телефонов для Кении, описывающий перемещение почти 15 миллионов пользователей, полученный из их 12 миллиардов сообщений в течение года, чтобы изучить, в какой степени данные переписи миграции за аналогичный период времени отражают перемещения. в диапазоне временных масштабов в абсолютном и относительном выражении.Кроме того, мы изучаем соответствие моделей пространственного взаимодействия гравитационного типа наборам данных, чтобы изучить потенциал использования таких моделей для количественной оценки моделей движения на основе демографических данных с географической привязкой.
Материалы и методы
Данные
Данные об использовании мобильного телефона.
Анонимные данные о звонках по мобильному телефону, агрегированные на уровне башни маршрутизации для Кении, были предоставлены действующим оператором мобильной связи и включали время звонков и SMS-сообщений от 14 816 512 абонентов с июня 2008 г. по июнь 2009 г. (февраль 2009 г. отсутствует в наборе данных). ).В интересах защиты конфиденциальности ограниченный доступ к анонимным данным был предоставлен избранному кругу исследователей. Следуя прецеденту предыдущих подобных исследований [7], [21]–[27], данные были предоставлены в анонимной форме, с подписчиками, представленными в виде уникальных хэшированных идентификаторов, и были обработаны аналогично предыдущим исследованиям. В общей сложности было зарегистрировано более двенадцати миллиардов разговоров по мобильным телефонам, включая местоположение одной из 11 920 маршрутных вышек. На момент получения данных оператор, предоставивший записи данных о вызовах, занимал примерно 92% рынка.Все данные о подписчиках были объединены в масштабе округа для дальнейшего сохранения анонимности.
по июнь 2009 г. (февраль 2009 г. отсутствует в наборе данных). ).В интересах защиты конфиденциальности ограниченный доступ к анонимным данным был предоставлен избранному кругу исследователей. Следуя прецеденту предыдущих подобных исследований [7], [21]–[27], данные были предоставлены в анонимной форме, с подписчиками, представленными в виде уникальных хэшированных идентификаторов, и были обработаны аналогично предыдущим исследованиям. В общей сложности было зарегистрировано более двенадцати миллиардов разговоров по мобильным телефонам, включая местоположение одной из 11 920 маршрутных вышек. На момент получения данных оператор, предоставивший записи данных о вызовах, занимал примерно 92% рынка.Все данные о подписчиках были объединены в масштабе округа для дальнейшего сохранения анонимности.
Данные переписи населения.
В 2009 году в Кении была проведена национальная перепись населения и жилого фонда. По результатам переписи были получены данные о количестве жителей, сменивших место жительства между всеми 48 уездами в течение предыдущего года.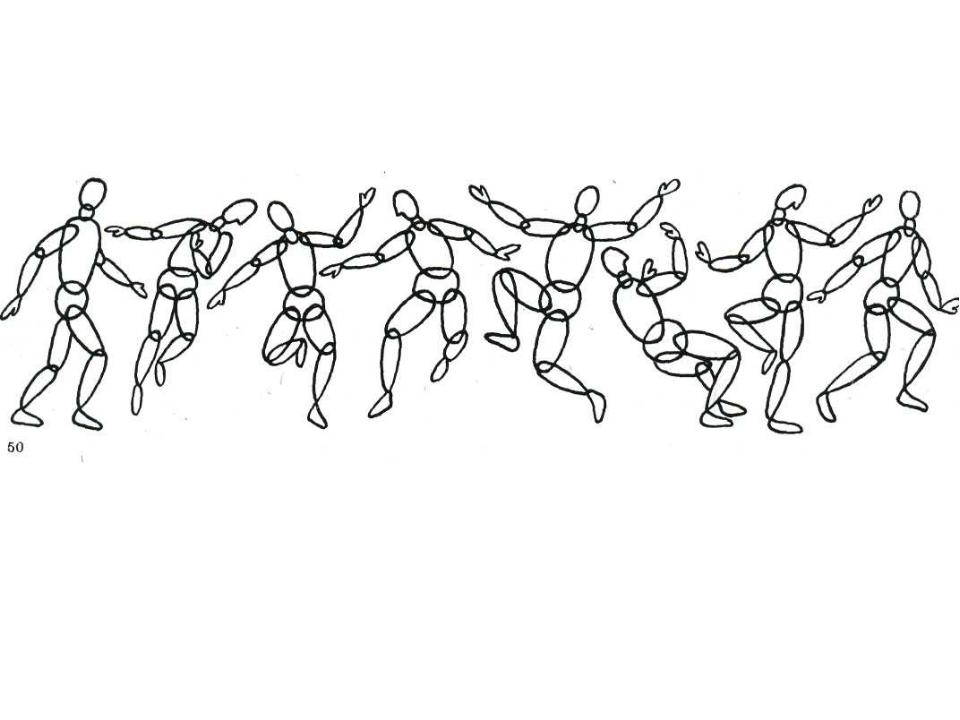
Количественное движение.
Данные мобильного телефона представлены в виде записей данных вызовов (CDR). Каждая запись в CDR содержит анонимный идентификатор вызывающего абонента, анонимный идентификатор получателя, дату, продолжительность и маршрутный номер башни как для вызывающего абонента, так и для получателя.Из CDR можно приблизительно определить географическое положение вызывающего абонента и получателя на основе уникальных координат долготы и широты для каждой вышки мобильной связи. Используя CDR, можно было получить местоположение каждого абонента каждый раз, когда он совершал/получал вызов (или SMS). Для каждого дня в наборе данных абонентам присваивалось местоположение одной вышки. Если в этот день абонент совершал хотя бы один звонок, то ему присваивалось местонахождение мажоритарной вышки маршрутизации. Если абонент в этот день не звонил, то ему присваивалось местоположение его самой последней вышки маршрутизации.Это обеспечило временные ряды местоположений вышек для каждого абонента в каждый день.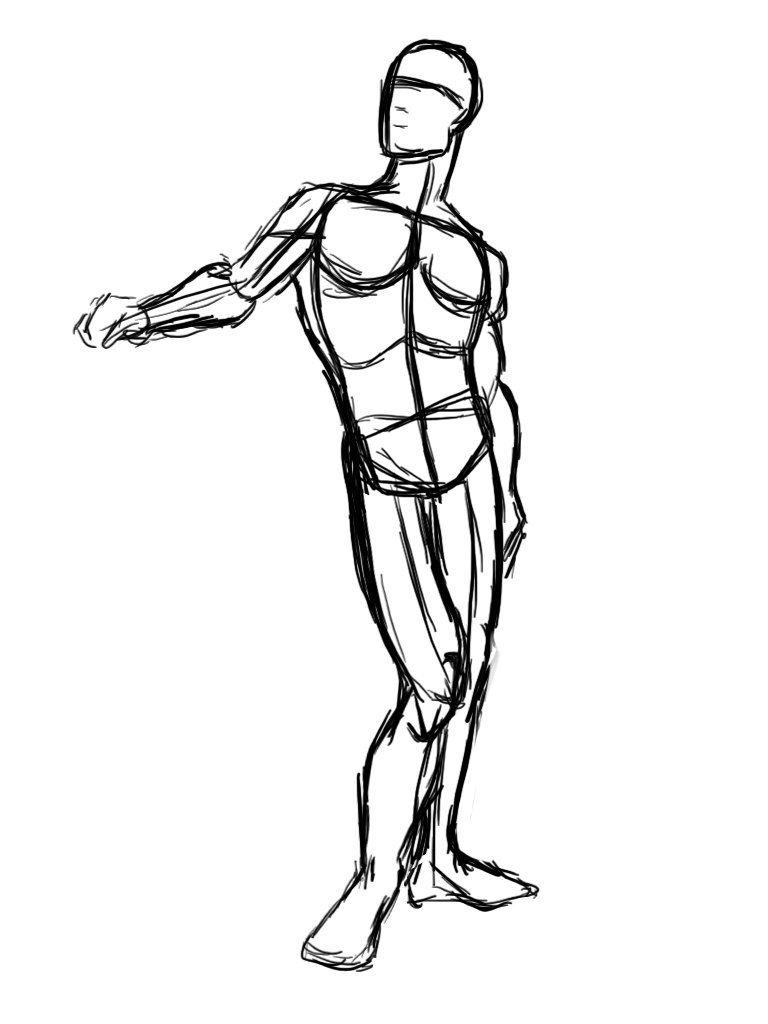 Как и в предыдущих исследованиях, поездки рассчитываются путем наблюдения за изменением местоположения абонентской вышки по сравнению с предыдущим днем [7]. Однако, чтобы сравнить данные мобильных телефонов с данными переписи, мы объединили вышки на уровне округа на основе местоположения вышки. Таким образом, учитывались только поездки между башнями в разных округах. Для каждой измеренной поездки продолжительность поездки рассчитывалась путем подсчета последовательных дней в новом месте.
Как и в предыдущих исследованиях, поездки рассчитываются путем наблюдения за изменением местоположения абонентской вышки по сравнению с предыдущим днем [7]. Однако, чтобы сравнить данные мобильных телефонов с данными переписи, мы объединили вышки на уровне округа на основе местоположения вышки. Таким образом, учитывались только поездки между башнями в разных округах. Для каждой измеренной поездки продолжительность поездки рассчитывалась путем подсчета последовательных дней в новом месте.
Анализы
Сравнения между мобильным телефоном и данными переписи населения.
Было рассчитано количество поездок, полученных на основе данных мобильного телефона, которые попали в различные рамки длительности поездок (см. условные обозначения к Таблице 1). Для разной продолжительности поездок было рассчитано абсолютное количество поездок между всеми парами округов по данным мобильного телефона и сопоставлено с данными переписи с использованием линейной регрессии и коэффициента корреляции Пирсона. Был рассчитан процент населения округа m , который путешествовал в округ n .На основе этих значений мы ранжировали каждый цветок на основе этой относительной меры движения как для мобильного телефона, так и для данных переписи. Относительные значения исходных и целевых потоков между всеми парами округов сравнивались для построения относительного ранжирования. Помимо сравнения и количественной оценки количества перемещений, как абсолютных, так и относительных, было построено эмпирическое распределение плотности на основе физического расстояния между округами. Используя центроиды каждого округа, было рассчитано евклидово расстояние между всеми парами округов и определено распределение вероятностей на основе расстояния поездки.
Был рассчитан процент населения округа m , который путешествовал в округ n .На основе этих значений мы ранжировали каждый цветок на основе этой относительной меры движения как для мобильного телефона, так и для данных переписи. Относительные значения исходных и целевых потоков между всеми парами округов сравнивались для построения относительного ранжирования. Помимо сравнения и количественной оценки количества перемещений, как абсолютных, так и относительных, было построено эмпирическое распределение плотности на основе физического расстояния между округами. Используя центроиды каждого округа, было рассчитано евклидово расстояние между всеми парами округов и определено распределение вероятностей на основе расстояния поездки.
Модель пространственного взаимодействия гравитационного типа.
Гравитационная модель является одной из наиболее хорошо изученных моделей пространственного взаимодействия, где смоделированное количество поездок между точками x и y , N x,y описывается как где население x , население y — это население местоположений x и y и dist(x,y) — функция расстояния между x и y .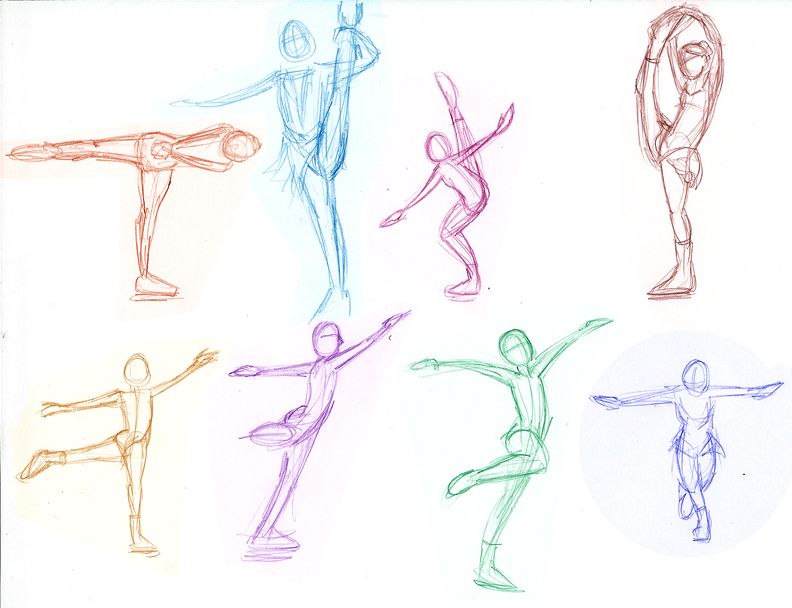 Показатели и точка пересечения k были получены путем подгонки модели к фактическим данным с использованием обобщенной линейной модели со спецификацией Пуассона [28]–[29]. Он предполагает, что единственными факторами, позволяющими оценить движение, являются места, измеряемые физическим расстоянием между местами, и важность, измеряемая численностью населения в каждом месте. Простота этой модели делает ее широко используемым методом для аппроксимации перемещения между местоположениями с использованием эмпирических данных. Были оценены показатели для отдельных гравитационных моделей, описывающих каждый тип движения, с использованием оценок численности населения из переписи и евклидова расстояния между центроидами каждого округа.
Показатели и точка пересечения k были получены путем подгонки модели к фактическим данным с использованием обобщенной линейной модели со спецификацией Пуассона [28]–[29]. Он предполагает, что единственными факторами, позволяющими оценить движение, являются места, измеряемые физическим расстоянием между местами, и важность, измеряемая численностью населения в каждом месте. Простота этой модели делает ее широко используемым методом для аппроксимации перемещения между местоположениями с использованием эмпирических данных. Были оценены показатели для отдельных гравитационных моделей, описывающих каждый тип движения, с использованием оценок численности населения из переписи и евклидова расстояния между центроидами каждого округа.
Результаты
Сравнение перемещений между округами между мобильным телефоном и данными переписи
Используя записи данных о звонках по мобильному телефону (CDR) из Кении в 2008–2009 гг., мы количественно оценили среднее перемещение каждого человека между округами в различных временных масштабах, а также количество поездок, продолжающихся разную продолжительность (см. Методы). ). Мы сравнили эти перемещения с перемещениями между округами, измеренными по данным переписи населения Кении. Сначала мы проанализировали абсолютные уровни перемещения между округами.Для каждого периода времени данные мобильных телефонов сильно завышали движение переписи в среднем на один-четыре порядка (рисунок S1A, таблица S1). Используя линейную регрессию, мы обнаружили, что наиболее близкими данными переписи были поездки продолжительностью более трех месяцев, но менее четырех месяцев (с поправкой R 2 = 0,404, p<0,0001) (рис. S1B). Общее движение лучше соответствует данным переписи со скорректированными значениями R 2 в диапазоне от 0,134 до 0,404, все со значительными p-значениями.Плохая корреляция между абсолютным числом перемещений, полученным на основе данных переписи населения о миграции, и данных об использовании мобильных телефонов неудивительна, учитывая различные типы перемещений в разных временных масштабах, которые фиксируются каждым из них.
Методы). ). Мы сравнили эти перемещения с перемещениями между округами, измеренными по данным переписи населения Кении. Сначала мы проанализировали абсолютные уровни перемещения между округами.Для каждого периода времени данные мобильных телефонов сильно завышали движение переписи в среднем на один-четыре порядка (рисунок S1A, таблица S1). Используя линейную регрессию, мы обнаружили, что наиболее близкими данными переписи были поездки продолжительностью более трех месяцев, но менее четырех месяцев (с поправкой R 2 = 0,404, p<0,0001) (рис. S1B). Общее движение лучше соответствует данным переписи со скорректированными значениями R 2 в диапазоне от 0,134 до 0,404, все со значительными p-значениями.Плохая корреляция между абсолютным числом перемещений, полученным на основе данных переписи населения о миграции, и данных об использовании мобильных телефонов неудивительна, учитывая различные типы перемещений в разных временных масштабах, которые фиксируются каждым из них.
Однако относительное упорядочение округов по перемещению из двух наборов данных было поразительно схожим. Округа были ранжированы на основе суммы исходящих и входящих поездок как по мобильному телефону, так и по данным переписи. Линейные соответствия были сильными и значимыми (скорректированные значения R 2 находились между 0.45–0,67 и 0,32–0,60, все со значительными значениями p для общего количества поездок и среднего числа соответственно) (см. Таблицу 1). На рис. 1 показаны карты на уровне округов, раскрашенные в соответствии с ранжированным исходящим суммарным количеством поездок из A) данных об использовании мобильных телефонов и B) данных переписи миграции, демонстрируя четкую корреляцию между двумя ранжированными значениями. На рис. 1C показано совпадение, в том числе и по сумме исходящих поездок. Как данные мобильных телефонов, так и данные переписи ранжирования округов были аналогичным образом основаны на общем количестве входящих/исходящих перемещений из каждого округа. Более того, как общее количество въездных, так и выездных поездок коррелировали с населением округа (коэффициент корреляции Пирсона для общего въезда = 0,657, для общего количества выездов = 0,664, значение p<0,001 для обоих случаев). Также учитывался рейтинг потока, рассчитанный на основе данных мобильных телефонов, по сравнению с рейтингом потока, полученным на основе переписи. Был рассчитан относительный процент населения округа m , путешествующего в округ n . На основе этих значений мы ранжировали каждый поток на основе этой относительной меры перемещения как для мобильного телефона, так и для данных переписи.Ранги потока были намного ближе, чем абсолютные значения движения (скорректированные значения R 2 = 0,542, p<0,0001) (рис. 1D). Ранжированные значения движения с участием сельских округов были сильно коррелированы (от города к деревне: коэффициент корреляции = 0,578, p<0,0001, от деревни к деревне: коэффициент корреляции = 0,53, p<0,0001, от деревни к городу: коэффициент корреляции = 0,365, p<0,0001 ).
Более того, как общее количество въездных, так и выездных поездок коррелировали с населением округа (коэффициент корреляции Пирсона для общего въезда = 0,657, для общего количества выездов = 0,664, значение p<0,001 для обоих случаев). Также учитывался рейтинг потока, рассчитанный на основе данных мобильных телефонов, по сравнению с рейтингом потока, полученным на основе переписи. Был рассчитан относительный процент населения округа m , путешествующего в округ n . На основе этих значений мы ранжировали каждый поток на основе этой относительной меры перемещения как для мобильного телефона, так и для данных переписи.Ранги потока были намного ближе, чем абсолютные значения движения (скорректированные значения R 2 = 0,542, p<0,0001) (рис. 1D). Ранжированные значения движения с участием сельских округов были сильно коррелированы (от города к деревне: коэффициент корреляции = 0,578, p<0,0001, от деревни к деревне: коэффициент корреляции = 0,53, p<0,0001, от деревни к городу: коэффициент корреляции = 0,365, p<0,0001 ).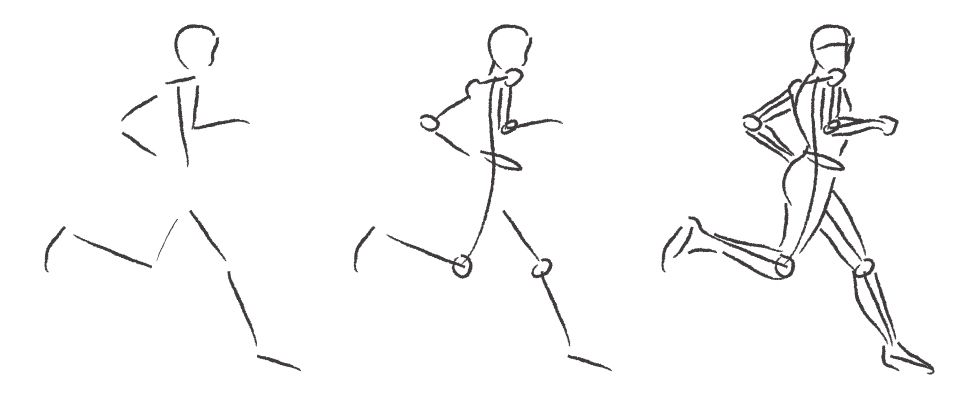 Однако ранжированные перемещения между городскими округами не имели существенной корреляции (коэффициент корреляции = 0.447, p = 0,109) (см. рисунок S2, таблицы S2 и S3).
Однако ранжированные перемещения между городскими округами не имели существенной корреляции (коэффициент корреляции = 0.447, p = 0,109) (см. рисунок S2, таблицы S2 и S3).
Рисунок 1. Сравнение ранжированных оценок движения.
Округа в Кении окрашены в соответствии с общим исходящим рейтингом из A) данных о перемещениях, полученных с помощью мобильного телефона (количество поездок между 2 и 3 месяцами, например перемещения, важные для изучения инфекционных заболеваний, передача которых варьируется в зависимости от сезона, таких как грипп) и B) данные переписи населения о миграции. Фактические значения показаны на C), а линия x-y один к одному показана красным цветом.D) Процент населения, перемещающегося между всеми парами округов. Для каждой переменной перемещения абсолютные исходящие перемещения были взвешены по процентной доле населения, переезжающего в каждый пункт назначения. Как для данных переписи о миграции, так и для данных о движении мобильных телефонов (количество поездок за 2–3 месяца) было рассчитано ранжированное значение (скорректированный R-квадрат = 0,5421, p<0,001).
https://doi.org/10.1371/journal.pone.0052971.g001
Сравнение расстояний
На основе данных мобильных телефонов можно количественно определить относительно небольшие перемещения в пространственном масштабе между вышками мобильной связи.Средняя дальность поездки на уровне вышек мобильной связи составила 15 км (среднее значение — 5 км) (рис. 2). При агрегировании перемещений вышек мобильной связи в том же пространственном масштабе, что и национальная перепись, среднее расстояние для перемещения переписи было выше, чем данные мобильных телефонов (среднее/медианное значение переписи: 182/127 км, среднее/медианное значение мобильных телефонов: 160/106 км). ), из-за размера и формы округов и использования центроидов для их представления (см. Методы). Однако оба распределения частоты поездок на разные расстояния от обоих источников данных были сходными (статистика Колмогорова-Смирнова: 0.1168, р<0,0001) [30]. Таким образом, несмотря на то, что оценки перемещения, полученные на основе данных переписи населения и мобильных телефонов, несопоставимы на абсолютном уровне, вероятность поездок на различные расстояния одинакова. В частности, данные переписи могут хорошо аппроксимировать вероятность поездок на более короткие расстояния, чем можно было бы предположить по абсолютному количеству поездок, рассчитанному с использованием данных переписи. Таким образом, полезность данных о миграции, полученных в результате переписи, может быть расширена для надежной оценки вероятности того, что жители совершают поездки на различные расстояния с частотой, значительно меньшей, чем временные рамки года, используемые во многих вопросниках переписи.
В частности, данные переписи могут хорошо аппроксимировать вероятность поездок на более короткие расстояния, чем можно было бы предположить по абсолютному количеству поездок, рассчитанному с использованием данных переписи. Таким образом, полезность данных о миграции, полученных в результате переписи, может быть расширена для надежной оценки вероятности того, что жители совершают поездки на различные расстояния с частотой, значительно меньшей, чем временные рамки года, используемые во многих вопросниках переписи.
Рисунок 2. Распределение продолжительности поездок между округами на основе перемещений, полученных с помощью мобильных телефонов, и миграций, полученных в результате переписи.
Была рассчитана вероятность поездок на различные расстояния как по данным переписи, так и по данным об использовании мобильных телефонов (количество поездок продолжительностью от 2 до 3 месяцев).
https://doi.org/10.1371/journal.pone.0052971.g002
Параметризация гравитационной модели на основе данных переписи
Наконец, была изучена возможность использования данных переписи о миграции в качестве основы для моделирования перемещений населения в различных временных масштабах с использованием модели пространственного взаимодействия гравитационного типа. В таблице S4 представлены оценочные показатели, а также соответствующее снижение отклонений, подходящих для каждого типа движения, в том числе по данным переписи. Миграции, полученные на основе данных переписи, показали наименьшее снижение отклонения (55,12%), тогда как среднее ежедневное и ежегодное перемещение, полученное на основе данных об использовании телефона, уменьшило отклонение на 80%. Неудивительно, что по мере увеличения продолжительности путешествия (с одной недели до 3-4 месяцев) показатель степени численности населения пункта назначения увеличивается, а показатель расстояния уменьшается (см. рис. 3А).Это означает, что по мере увеличения продолжительности поездки пункт назначения становится более важным при определении количества поездок, а расстояние до пункта назначения становится менее важным. На рисунках 3 B–E и S3 A–D показано соответствие моделей гравитации на основе данных мобильного телефона и данных переписи населения. В общем, результирующая подгонка завышает фактический ход.
В таблице S4 представлены оценочные показатели, а также соответствующее снижение отклонений, подходящих для каждого типа движения, в том числе по данным переписи. Миграции, полученные на основе данных переписи, показали наименьшее снижение отклонения (55,12%), тогда как среднее ежедневное и ежегодное перемещение, полученное на основе данных об использовании телефона, уменьшило отклонение на 80%. Неудивительно, что по мере увеличения продолжительности путешествия (с одной недели до 3-4 месяцев) показатель степени численности населения пункта назначения увеличивается, а показатель расстояния уменьшается (см. рис. 3А).Это означает, что по мере увеличения продолжительности поездки пункт назначения становится более важным при определении количества поездок, а расстояние до пункта назначения становится менее важным. На рисунках 3 B–E и S3 A–D показано соответствие моделей гравитации на основе данных мобильного телефона и данных переписи населения. В общем, результирующая подгонка завышает фактический ход. Однако для округов с низким населением и поездок на более короткие расстояния гравитационная модель недооценивает это путешествие.
Однако для округов с низким населением и поездок на более короткие расстояния гравитационная модель недооценивает это путешествие.
Рисунок 3. Модель пространственного взаимодействия гравитационного типа подходит для данных об использовании мобильного телефона.
Гравитационные модели были откалиброваны для каждой переменной движения. A) Значения параметров показаны на основе подгонки для различных продолжительностей отключения. Каждое значение параметра из данных переписи показано соответствующим цветом в виде пунктирной линии. Гравитационная модель была откалибрована, чтобы соответствовать количеству поездок между округами продолжительностью от 2 до 3 месяцев. B) Фактические данные по сравнению с подгонкой гравитационной модели показаны на рисунке (Данные/Подгонка). Отношение истинных данных к результатам подобранной модели показано с разбивкой по C) населению в округе происхождения, D) населению в пункте назначения и E) расстоянию (в километрах) между пунктом отправления и пунктом назначения. Модель недооценивает перемещения из округов с низким населением (как в качестве пункта отправления, так и назначения) и более короткие поездки.
Модель недооценивает перемещения из округов с низким населением (как в качестве пункта отправления, так и назначения) и более короткие поездки.
https://doi.org/10.1371/journal.pone.0052971.g003
Обсуждение
Новые подходы к количественной оценке моделей движения человека в пространственных и временных масштабах продолжают расширять наше понимание масштабов, направлений и движущих сил путешествий. Данные об использовании мобильных телефонов [7], [21]–[27], GPS-слежение [2], [31] и спутниковые снимки [32] позволяют продвинуться в нашем понимании динамики движения, особенно в странах с низким уровнем дохода.Однако такие данные и анализ ограничены конкретными местами или странами и временными рамками и часто включают конфиденциальные данные, которые не могут быть широко распространены. Для количественной оценки и лучшего понимания моделей перемещения в странах с низким доходом на больших территориях и в различных временных масштабах необходимо более эффективно использовать существующие широко и регулярно собираемые данные, такие как данные о миграции из национальных переписей. Однако способность таких наборов данных обобщаться на другие масштабы движения во временных масштабах ранее не анализировалась.Здесь мы показали, что данные переписи миграции могут быть использованы в качестве суррогата признаков кратковременного масштаба, более частых перемещений.
Однако способность таких наборов данных обобщаться на другие масштабы движения во временных масштабах ранее не анализировалась.Здесь мы показали, что данные переписи миграции могут быть использованы в качестве суррогата признаков кратковременного масштаба, более частых перемещений.
В абсолютном выражении неудивительно, что существует плохая корреляция между данными о миграции, полученными переписью, и данными о перемещении, полученными по телефону, из-за различных аспектов измеряемых перемещений. Данные о миграции, полученные в ходе национальных переписей населения и жилого фонда, сосредоточены на описании постоянных изменений места жительства, в то время как данные об использовании телефона охватывают все типы перемещений, от этих постоянных изменений места жительства до сезонных перемещений, случайных поездок на дальние расстояния и регулярных рутинных перемещений [2]. [33]–[34].Однако ясно, что с точки зрения относительной силы связей во всех временных масштабах движения существуют сильные корреляции. Причины этого, вероятно, многочисленны и разнообразны, включая социальные мотивы, т.е. области экономических возможностей и семейных связей или физических особенностей, например. транспортная доступность и препятствия со стороны естественных преград, таких как горы или озера [19], [35]. Сильная относительная связь между более короткими моделями перемещения во временном масштабе и миграциями, полученными в результате переписи, сохраняется во всех исследованных временных масштабах.Это дает практикующим специалистам возможность расширить полезность данных переписи для получения относительных оценок движения в меньших временных масштабах для различных приложений. Они могут включать картирование кластеров регионов, которые относительно сильно связаны перемещениями в соответствующих временных масштабах для целей контроля и планирования ликвидации [7], [21], [33], идентификацию относительно слабо связанных/изолированных регионов [33]. и планирование экономического развития для улучшения инфраструктуры [36].
Причины этого, вероятно, многочисленны и разнообразны, включая социальные мотивы, т.е. области экономических возможностей и семейных связей или физических особенностей, например. транспортная доступность и препятствия со стороны естественных преград, таких как горы или озера [19], [35]. Сильная относительная связь между более короткими моделями перемещения во временном масштабе и миграциями, полученными в результате переписи, сохраняется во всех исследованных временных масштабах.Это дает практикующим специалистам возможность расширить полезность данных переписи для получения относительных оценок движения в меньших временных масштабах для различных приложений. Они могут включать картирование кластеров регионов, которые относительно сильно связаны перемещениями в соответствующих временных масштабах для целей контроля и планирования ликвидации [7], [21], [33], идентификацию относительно слабо связанных/изолированных регионов [33]. и планирование экономического развития для улучшения инфраструктуры [36]. Более того, показатели гравитационных моделей (таблица S4) и, в частности, взаимосвязь между показателями различных типов перемещений по телефону и показателями данных переписи миграции могут использоваться для аппроксимации различных типов перемещений, когда только представлена национальная перепись (см. рис. 3А). Как правило, соотношения между этими изменяющимися во времени типами перемещений и данными переписи миграции могут позволить получить более подробные оценки перемещений после подгонки гравиметрической модели к интересующему местоположению.
Более того, показатели гравитационных моделей (таблица S4) и, в частности, взаимосвязь между показателями различных типов перемещений по телефону и показателями данных переписи миграции могут использоваться для аппроксимации различных типов перемещений, когда только представлена национальная перепись (см. рис. 3А). Как правило, соотношения между этими изменяющимися во времени типами перемещений и данными переписи миграции могут позволить получить более подробные оценки перемещений после подгонки гравиметрической модели к интересующему местоположению.
Ясно, что, хотя приведенные здесь результаты иллюстрируют возможность использования данных переписи миграции для представления перемещений за более короткий период времени, существуют неопределенности и оговорки, которые необходимо признать, прежде чем это делать. В то время как подгонка модели пространственного взаимодействия гравитационного типа приводит к значительному уменьшению отклонений, все еще существует много неучтенных вариаций, некоторые из которых можно объяснить добавлением дополнительных демографических, социально-экономических и экологических переменных [19]. Модель плохо подходит для поездок по малонаселенным районам и для поездок на короткие расстояния. Однако точный характер этих изменений еще предстоит полностью объяснить, и экстраполяция на другие страны, которые имеют другие движущие силы, по своей сути будет неопределенной. Оба источника данных, используемых в этом исследовании, имеют присущие им ограничения, которые хорошо задокументированы в других источниках [37]–[38]. Возможно, данные мобильных телефонов предоставляют одни из самых подробных данных о перемещениях людей, доступных в национальном масштабе.Тем не менее, такие данные имеют врожденные погрешности и не обязательно репрезентативны для населения [37]. Кроме того, данные переписи по миграции содержат неопределенности, которые могут возникнуть из-за интерпретации вопросов о миграции респондентами, фактического времени в течение года переезда и невозможности полностью охватить мобильные сообщества людей, таких как рабочие-мигранты или кочевые народы. Наконец, проведенный здесь анализ был ограничен пространственным масштабом национальной переписи и, таким образом, не использует уточненные схемы передвижения, доступные из данных мобильных телефонов, и не учитывает какую-либо неоднородность моделей передвижения в пределах округа.
Модель плохо подходит для поездок по малонаселенным районам и для поездок на короткие расстояния. Однако точный характер этих изменений еще предстоит полностью объяснить, и экстраполяция на другие страны, которые имеют другие движущие силы, по своей сути будет неопределенной. Оба источника данных, используемых в этом исследовании, имеют присущие им ограничения, которые хорошо задокументированы в других источниках [37]–[38]. Возможно, данные мобильных телефонов предоставляют одни из самых подробных данных о перемещениях людей, доступных в национальном масштабе.Тем не менее, такие данные имеют врожденные погрешности и не обязательно репрезентативны для населения [37]. Кроме того, данные переписи по миграции содержат неопределенности, которые могут возникнуть из-за интерпретации вопросов о миграции респондентами, фактического времени в течение года переезда и невозможности полностью охватить мобильные сообщества людей, таких как рабочие-мигранты или кочевые народы. Наконец, проведенный здесь анализ был ограничен пространственным масштабом национальной переписи и, таким образом, не использует уточненные схемы передвижения, доступные из данных мобильных телефонов, и не учитывает какую-либо неоднородность моделей передвижения в пределах округа.
Растущий интерес к пространственному моделированию инфекционных заболеваний [4]–[5], [8], [38], географических факторов экономического развития [36] и доступа к базовым услугам [9], [39]–[41] стимулируют растущий спрос на эмпирические данные и модели моделей движения человека в различных пространственных и временных масштабах. Этот спрос, в свою очередь, ускоряет использование традиционных источников данных, таких как перепись, данные о поездках на работу и обследования домохозяйств, а также разработку новых подходов, основанных на ранее недоступных источниках данных, включая мобильные телефоны и устройства GPS-слежения [2].Каждый из этих источников данных имеет свои сильные и слабые стороны, начиная от размеров выборки, пространственно-временного охвата и разрешения и заканчивая простотой сбора и доступности данных. Существует большой потенциал для объединения этих различных наборов данных различными способами, чтобы использовать сильные стороны каждого из них и получить более полное представление о моделях движения человека в пространственных и временных масштабах, как показано в этих анализах. Такие подходы отражают цели более широкой инициативы The Human Mobility Mapping Project (www.thummp.org), ориентированный на улучшенную количественную оценку моделей передвижения людей в регионах с низким уровнем дохода и разработку моделей открытого доступа для их описания.
Такие подходы отражают цели более широкой инициативы The Human Mobility Mapping Project (www.thummp.org), ориентированный на улучшенную количественную оценку моделей передвижения людей в регионах с низким уровнем дохода и разработку моделей открытого доступа для их описания.
Дополнительная информация
Рисунок S1.
Сравнение между перемещениями, полученными с помощью мобильных телефонов, и миграциями переписи населения. A) Для каждой пары округов среднее количество поездок продолжительностью от 2 до 3 месяцев было рассчитано на основе данных мобильного телефона. Это число сравнивается с объемом движения по данным национальной переписи.Линия x–y показана красным цветом, что указывает на завышение данных мобильного телефона. Б) Соотношение между каждыми абсолютными значениями движения по каждой переменной движения сравнивалось с данными переписи. Скорректированные значения R 2 были получены с использованием линейной регрессии.
10.1371/journal.pone.0052971.s001
(PDF)
Рисунок S2.
Взаимосвязь между моделями перемещения мобильных телефонов и данными переписи для округов, разделенных на городские и сельские перемещения. Округа были классифицированы как городские или сельские, и все схемы передвижения сегментированы на основе классификации происхождения и назначения. Данные мобильного телефона (здесь поездки продолжительностью от двух до трех месяцев) завышают данные переписи, при этом пунктирные линии показывают линию x – y.
10.1371/journal.pone.0052971.s002
(PDF)
Рисунок S3.
Полученное соответствие гравитационной модели, описывающей данные переписи. A) Сравнение фактических данных с гравитационной моделью.Отношение истинных данных к результатам подобранной модели показано с разбивкой по A) населению пункта отправления B) населению пункта назначения и C) расстоянию (в километрах) между пунктом отправления и пунктом назначения. Гравитационная модель оценивает перемещения из малонаселенные округа (как пункт отправления, так и пункт назначения) и более короткие поездки. В целом модель завышает количество поездок.
Гравитационная модель оценивает перемещения из малонаселенные округа (как пункт отправления, так и пункт назначения) и более короткие поездки. В целом модель завышает количество поездок.
10.1371/journal.pone.0052971.s003
(PDF)
Таблица S1.
Соотношение между данными мобильного телефона и данными переписи для всех переменных перемещения. Для всех переменных перемещений, определенных с использованием данных мобильного телефона, мы сравнили отношение этих данных к данным переписи. Минимальное и максимальное значения образуют 90% квантильный интервал. При всех видах передвижения мобильный телефон завышает данные переписи.
10.1371/journal.pone.0052971.s004
(DOCX)
Таблица S2.
Соотношение значений перемещений мобильных телефонов и переписи перемещений по типам округов. Передвижения подразделяются по маршрутам А) из городских округов в сельские Б) между городскими округами В) из сельских округов в городские и Г) между сельскими округами. Минимальное и максимальное значения образуют 90% квантильный интервал. По всем переменным перемещения, за исключением некоторых случаев поездок продолжительностью от трех до четырех месяцев и среднего количества ежедневных поездок, данные мобильных телефонов завышают данные переписи. Для поездок между городскими округами данные мобильных телефонов имеют наибольшее завышение данных переписи.
Минимальное и максимальное значения образуют 90% квантильный интервал. По всем переменным перемещения, за исключением некоторых случаев поездок продолжительностью от трех до четырех месяцев и среднего количества ежедневных поездок, данные мобильных телефонов завышают данные переписи. Для поездок между городскими округами данные мобильных телефонов имеют наибольшее завышение данных переписи.
10.1371/journal.pone.0052971.s005
(DOCX)
Таблица S3.
Корреляция между моделями перемещения мобильных телефонов и данными переписи населения округов, разделенных на городские и сельские перемещения. Коэффициент корреляции Пирсона использовался для количественной оценки взаимосвязи между перемещениями мобильных телефонов и данными переписи. Значимые коэффициенты корреляции (p<0,05) отмечены звездочкой. Перемещения были разделены на городские/сельские категории происхождения и назначения. В целом взаимосвязь между обоими источниками данных является наиболее сильной между поездками из города в сельскую местность и между поездками из деревни в город. Взаимосвязь перемещения между городскими округами имеет значение только для поездок продолжительностью от двух до четырех месяцев.
Взаимосвязь перемещения между городскими округами имеет значение только для поездок продолжительностью от двух до четырех месяцев.
10.1371/journal.pone.0052971.s006
(DOCX)
Таблица S4.
Коэффициенты и подгонка для гравитационных моделей. Для каждой переменной движения была подобрана гравитационная модель с использованием совокупностей для исходной и конечной точек, а также евклидово расстояние между исходной и конечной точками.
10.1371/journal.pone.0052971.s007
(DOCX)
Благодарности
Авторы хотели бы поблагодарить д-ра Коллинза Опийо и Бернарда Обаси из Национального статистического бюро Кении и д-ра К.Роберту Сноу и доктору Абдисалану Нуру из KEMRI за помощь в получении данных переписи. Эта работа является частью результатов Проекта картирования мобильности человека (www.thummp.org).
Вклад авторов
Задумал и разработал эксперименты: APW AJT. Проведены эксперименты: APW AJT. Проанализированы данные: APW AJT. Предоставленные реагенты/материалы/инструменты для анализа: APW AJT COB NE DKP DLS AJG. Написал статью: APW AJT COB.
Проанализированы данные: APW AJT. Предоставленные реагенты/материалы/инструменты для анализа: APW AJT COB NE DKP DLS AJG. Написал статью: APW AJT COB.
Каталожные номера
- 1. Viboud C, Bjornstad ON, Smith DL, Simonsen L, Miller MA, et al.(2006) Синхронность, волны и пространственные иерархии в распространении гриппа. Наука 312: 447–451.
- 2. Стоддард С.Т., Моррисон А.С., Васкес-Прокопек Г.М., Пас Солдан В., Кохель Т.Дж. и др. (2009) Роль движения человека в передаче трансмиссивных патогенов. PLoS Negl Trop Dis 7 (doi:10.1371/journal.pntd.0000481).
- 3. Протеро Р.М. (1977)Болезнь и мобильность: игнорируемый фактор в эпидемиологии. Int J Epidemiol 6: 259–287.
- 4. Фергюсон Н.М., Каммингс Д.А., Кошемез С., Фрейзер С., Райли С. и др.(2005) Стратегии сдерживания возникающей пандемии гриппа в Юго-Восточной Азии. Природа 437: 209–214.
- 5.
Balcan D, Colizza V, Goncalves B, Hu H, Ramasco JJ и др. (2009) Многомасштабные сети мобильности и пространственное распространение инфекционных заболеваний. Proc Natl Acad Sci USA 106: 21484–21489.
- 6. Лонгини И.М., Низам А., Сюй С., Унгчусак К., Ханшаоворакул В. и соавт. (2005) Сдерживание пандемического гриппа в источнике. Наука 309: 1083–1087.
- 7.Весоловски А., Игл Н., Татем А.Дж., Смит Д.Л., Нур А.М. и соавт. (2012) Количественная оценка воздействия мобильности человека на малярию. Наука 338: 267–270.
- 8. Брайсесон Д.Ф., Брэдбери А., Брэдбери Т. (2006) Пути к сокращению бедности? Анализ влияния сельских дорог на мобильность в Африке и Азии. Девел Пол Откр. 26: 1–38.
- 9. Окви П.О., Нденг’е Г., Кристьянсон П., Арунга М., Нотенбарт А. и др. (2007) Пространственные детерминанты бедности в сельской Кении. Proc Natl Acad Sci USA 104: 16769–16774.
- 10.
Tatem AJ, Hay SI, Rogers DJ (2006)Глобальный трафик и распространение переносчиков болезней. Proc Natl Acad Sci USA 103: 6242–6247.
- 11. Пименталь Д., Зунига Р., Моррисон Д. (2005) Обновленная информация об экологических и экономических издержках, связанных с чужеродными инвазивными видами в Соединенных Штатах. Экол Экон 52: 273–288.
- 12. Yang Y, Atkinson P, Ettema D (2007)Индивидуальное пространственно-временное моделирование передачи инфекционных заболеваний в городе.Интерфейс JR Soc 5: 759–772.
- 13. Килинг М.Дж., Данон Л., Вернон М.С., Хаус Т. (2010) Индивидуальная идентичность и сети движения для метапопуляций болезней. Proc Natl Acad Sci USA 107: 8866–8870.
- 14. Райли С., Фергюсон Н.М. (2006)Передача оспы и борьба с ней: пространственная динамика в Великобритании. Proc Natl Acad Sci USA 103: 12637–12642.
- 15.
Шанкс Г.Д., Хэй С.И., Стерн Д.И., Биомндо К., Сноу Р.В. (2002) Метеорологическое влияние на малярию Plasmodium falciparum в высокогорных чайных плантациях Керичо, Западная Кения.Emerg Infect Dis 8: 1404–1408.
- 16. Булиунг Р.Н., Реммель Т.К. (2008) Открытый исходный код, пространственный анализ и исследование поведения во время путешествий: возможности пакета aspace. J Geogr Syst 10: 191–216.
- 17. Шлих Р., Аксхаузен К.В. (2003) Обычное поведение в путешествии: данные из шестинедельного дневника путешествий. Транс 30: 13–36.
- 18. Парсонс К.Р., Скелдон Р., Уолмсли Т.Л., Винтерс Л.А. (2007) Количественная оценка международной миграции: база данных двусторонних мигрантов.Рабочий документ Всемирного банка по исследованию политики 4165.
- 19. Генри С., Бойл П., Ламбин Э.Ф. (2002) Моделирование миграции между провинциями в Буркина-Фасо, Западная Африка: роль социально-демографических и экологических факторов. Приложение Геог 23: 115–136.
- 20.
Годдард А.Д., Гулд В.Т.С., Массер Ф.И. (1975) Данные переписи населения и анализ миграции в тропической Африке. Географическая летопись. Серия B, Человеческая география 57: 26–41.
- 21. Ле Менах А., Татем А.Дж., Коэн Дж.М., Хэй С.И., Рэнделл Х. и др.. (2011). Научные отчеты 1 (doi: 10.1038/srep00093).
- 22. Гонсалес М.С., Идальго К.А., Барабаси А.Л. (2008) Понимание моделей индивидуальной мобильности человека. Природа 453: 779–782.
- 23. Симини Ф., Гонсалес М.С., Маритан А., Барабаси А.Л. (2012) Универсальная модель моделей мобильности и миграции. Природа 484: 96–100.
- 24. Бенгтссон Л., Лу С., Торсон А., Гарфилд Р., фон Шреб Дж. (2011 г.) Улучшение реагирования на стихийные бедствия и эпидемии за счет отслеживания перемещений населения с помощью данных сети мобильной связи: геопространственное исследование после землетрясения на Гаити.PLoS Med 8 (doig:10.1371/journal.pmed.1001083).
- 25.
Tatem AJ, Qiu Y, Smith DL, Sabot O, Ali AS, et al.. (2009) Использование данных мобильного телефона для оценки моделей поездок и показателей завоза Plasmodium falciparum среди жителей Занзибара. Малар J 8 (дои: 10.1186/1475-2875-8-287).
- 26. Song C, Qu Z, Blumm N, Barabasi AL (2010) Пределы предсказуемости человеческой мобильности. Наука 327: 1018–1021.
- 27. Lu X, Bengtsson L, Home P (2012) Предсказуемость перемещения населения после землетрясения на Гаити в 2010 году.Proc Natl Acad Sci USA (doi: 10.1073/pnas.1203882109).
- 28. Zeileis A, Kleiber C, Jackman S (2008) Модели регрессии для данных подсчета в R. J Stat Software 27.
- 29. Флауэрдью Р., Эйткин М. (1982) Метод подбора гравитационной модели на основе распределения Пуассона. J Reg Sci 22: 191–202.
- 30. Мэсси Ф.Дж. (1951) Тест Колмогорова-Смирнова на пригодность. ЯСА 46: 68–78.
- 31.
Васкес-Прокопек Г.М., Стоддард С.Т., Пас-Солдан В., Моррисон А.С., Элдер Дж.П. и др.. (2009) Полезность имеющихся в продаже регистраторов данных GPS для отслеживания перемещений человека и воздействия вируса денге. Int J Health Geogr 8 (doi: 10.1186/1476-072X-8-68).
- 32. Бхарти Н., Татем А.Дж., Феррари М.Дж., Граис Р.Ф., Джибо А. и др. (2011) Объяснение сезонных колебаний заболеваемости корью в Нигере с использованием снимков ночного освещения. Наука 334: 1424–1427.
- 33. Tatem AJ, Smith DL (2010)Международные перемещения населения и региональные стратегии ликвидации малярии Plasmodium falciparum.Proc Natl Acad Sci USA 107: 12222–12227.
- 34. Пиндолиа Д.К., Гарсия А.Дж., Весоловски А., Смит Д.Л., Баки К.О. и др.. (2012) Данные о перемещении людей для стратегического планирования борьбы с малярией и ее ликвидации. Малар J 11 (дои: 10.1186/1475-2875-11-205).
- 35. Линард С., Гилберт М., Сноу Р.В., Нур А.М., Татем А.Дж. (2012) Распределение населения, схемы расселения и доступность в Африке в 2010 г. PLoS ONE 7 (doi:10.1371/journal.pone.0031743).
- 36.
Всемирный банк (2008 г.) Доклад о мировом развитии за 2009 г. : изменение экономической географии.Доклад о мировом развитии.
- 37. Весоловски А., Игл Н., Нур А.М., Сноу Р.В., Баки К.О. (2012) Неоднородные модели владения и использования мобильных телефонов в Кении. PLoS ONE 7 (doi:10.1371/journal.pone.0035319).
- 38. Tatem AJ, Adamo S, Bharti N, Burgert CR, Castro M, et al.. (2012) Картирование групп риска: улучшение пространственных демографических данных для моделирования инфекционных заболеваний и получения показателей здоровья. Popul Health Metr 10 (doi: 10.1186/1478-7954-10-8).
- 39.Алегана В.А., Райт Дж.А., Пентрина У., Нур А.М., Сноу Р.В. и др.. (2012)Пространственное моделирование использования медицинских услуг для лечения лихорадки в Намибии. Int J Health Geogr 11 (doi: 10.1186/1476-072X-11-6).
- 40. Холлингсворт Т.Д., Фергюсон Н.М., Андерсон Р.М. (2007) Частые путешественники и скорость распространения эпидемий. Emerg Infect Dis 13: 288–1294.
- 41.
Шейх-Мохамед А. , Велема Дж. П. (1999) Там, где нет доступа к здравоохранению: кочевое население Африки к югу от Сахары.Trop Med Int Health 4: 695–707.
 (2009) Многомасштабные сети мобильности и пространственное распространение инфекционных заболеваний. Proc Natl Acad Sci USA 106: 21484–21489.
(2009) Многомасштабные сети мобильности и пространственное распространение инфекционных заболеваний. Proc Natl Acad Sci USA 106: 21484–21489.


 Int J Health Geogr 8 (doi: 10.1186/1476-072X-8-68).
Int J Health Geogr 8 (doi: 10.1186/1476-072X-8-68). : изменение экономической географии.Доклад о мировом развитии.
: изменение экономической географии.Доклад о мировом развитии. , Велема Дж. П. (1999) Там, где нет доступа к здравоохранению: кочевое население Африки к югу от Сахары.Trop Med Int Health 4: 695–707.
, Велема Дж. П. (1999) Там, где нет доступа к здравоохранению: кочевое население Африки к югу от Сахары.Trop Med Int Health 4: 695–707.Скелетная система
Обзор
Что такое костная система?
Скелетная система является центральной структурой вашего тела. Он состоит из костей и соединительной ткани, включая хрящи, сухожилия и связки. Его также называют опорно-двигательным аппаратом.
Функция
Что делает костная система?
Скелет выполняет множество функций. Помимо того, что он дает нам человеческий облик и черты, он:
- Позволяет двигаться: Ваш скелет поддерживает вес вашего тела, помогая вам стоять и двигаться.Суставы, соединительная ткань и мышцы работают вместе, чтобы сделать ваши части тела подвижными.
- Производит клетки крови: Кости содержат костный мозг. Красные и белые кровяные тельца вырабатываются в костном мозге.
- Защищает и поддерживает органы: Ваш череп защищает ваш мозг, ваши ребра защищают ваше сердце и легкие, а ваш позвоночник защищает ваш позвоночник.
- Хранит минералы: В костях содержится запас таких минералов, как кальций и витамин D.
Анатомия
Из каких частей состоит костная система?
Скелетная система представляет собой сеть множества различных частей, которые работают вместе, чтобы помочь вам двигаться. Основная часть вашей скелетной системы состоит из ваших костей, твердых структур, которые создают каркас вашего тела — скелет. В скелете взрослого человека 206 костей. Каждая кость имеет три основных слоя:
- Надкостница: Надкостница представляет собой прочную мембрану, покрывающую и защищающую кость снаружи.
- Компактная кость: Под надкостницей компактная кость белая, твердая и гладкая. Обеспечивает структурную поддержку и защиту.
- Губчатая кость: Сердцевина, внутренний слой кости мягче, чем компактная кость. В нем есть небольшие отверстия, называемые порами, для хранения костного мозга.

Другие компоненты вашей костной системы включают:
- Хрящ: Это гладкое и гибкое вещество покрывает кончики ваших костей в месте их соединения.Это позволяет костям двигаться без трения (трения друг о друга). Когда хрящ изнашивается, как при артрите, это может быть болезненным и вызывать проблемы с движением.
- Суставы: Сустав — это место соединения двух или более костей в теле. Существует три различных типа суставов. Типы суставов:
- Неподвижные суставы: Неподвижные суставы вообще не позволяют костям двигаться, как суставы между костями черепа.
- Частично подвижные суставы: Эти суставы обеспечивают ограниченную подвижность.Суставы грудной клетки частично подвижны.
- Подвижные суставы: Подвижные суставы обеспечивают широкий диапазон движений. Локоть, плечо и колено — подвижные суставы.
- Связки: Полосы прочной соединительной ткани, называемые связками, скрепляют кости.
- Сухожилия: Сухожилия представляют собой полосы ткани, соединяющие концы мышц с костью.
 Локоть, плечо и колено — подвижные суставы.
Локоть, плечо и колено — подвижные суставы.Условия и расстройства
Какие общие состояния могут повлиять на костную систему?
Многие заболевания могут поражать кости, суставы и ткани, из которых состоит костная система.Некоторые случаются в результате болезни или травмы. Другие развиваются из-за износа по мере взросления. Условия, которые могут повлиять на костную систему, могут включать:
- Артрит: Возраст, травмы и заболевания, такие как болезнь Лайма, могут привести к артриту, болезненному изнашиванию суставов.
- Перелом: Болезнь, опухоль или травма могут вызвать нагрузку на кость, что приведет к ее перелому.
- Остеосаркома : Рак, который формируется в костях, может вызывать опухоли, которые могут ослабить и сломать кости.
- Остеопороз: Потеря костной массы, вызванная нехваткой кальция, может привести к хрупкости и ломкости костей, известной как остеопороз.
- Растяжения и разрывы: Возраст, болезни и травмы могут привести к чрезмерному растяжению и разрыву соединительной ткани.
уход
Как сохранить здоровье костной системы?
Чтобы ваш скелет был крепким и здоровым, вам необходимо:
- Включите в свой рацион большое количество витамина D и кальция (попробуйте молоко, йогурт или миндаль), чтобы кости были крепкими.
- Пейте много воды, чтобы поддерживать здоровье тканей.
- Регулярно делайте физические упражнения для укрепления костей и суставов.
- Поддерживайте здоровый вес, чтобы избежать дополнительной нагрузки на кости и хрящи.
- Носите защитное снаряжение во время контактных видов спорта, таких как футбол и хоккей.
- Будьте осторожны на лестнице, чтобы не упасть.

Что будет, если сломать кость?
Ваш лечащий врач классифицирует перелом в зависимости от того, как ломается кость.Типы переломов включают:
- Конюшня (закрытая): Концы сломанных костей выстраиваются в линию.
- Стрессовый перелом: Чрезмерное использование вызывает трещину в кости.
- Открытый (составной): Сломанная кость пробивает кожу.
Если вы сломаете кость, вам потребуется визуализирующее исследование, называемое рентгеном, чтобы ваш врач мог определить тип перелома. В зависимости от серьезности перелома вам нужно будет обездвижить его (предотвратить его движение) в гипсе или корсете на срок от трех до восьми недель.Полное заживление сломанных костей может занять несколько месяцев.
Часто задаваемые вопросы
Когда мне следует позвонить своему поставщику медицинских услуг по поводу проблемы с моей костной системой?
Позвоните своему лечащему врачу, если боль, отек или скованность в костях или суставах продолжаются более нескольких дней или мешают вашей повседневной деятельности. Врачи-ортопеды специализируются на костной системе. Эти врачи могут помочь вам решить проблемы с:
Врачи-ортопеды специализируются на костной системе. Эти врачи могут помочь вам решить проблемы с:
- Медицинское лечение, такое как лечение перелома.
- Изменения образа жизни, такие как физические упражнения.
- Лекарства, такие как ибупрофен для облегчения боли или Fosamax® (алендроновая кислота) для предотвращения потери костной массы.
Если вы подозреваете, что у вас сломана кость, обратитесь в отделение неотложной помощи или обратитесь к врачу. Вам потребуется лечение, чтобы убедиться, что он заживает правильно.
.